坦克行进间垂向稳定器机电液系统的建模与仿真
2019-03-27马毓泽杨国来
马毓泽,杨国来
(南京理工大学 机械工程学院,江苏 南京 210094)
坦克行进过程中,车体、炮塔和火炮之间通过机械结构组合在一起,并随着地形的起伏而振动,降低了行进间的火炮稳定性。为减小车体振动对行进间射击的影响,需要在坦克炮上安装稳定器,在车体不断振动的情况下,将火炮稳定在需要的射角和射向,以减小车体振动对行进间射击的影响[1]。
近年来,对坦克稳定系统及其控制方法的研究水平不断提高。在稳定系统结构以及车身动力学的研究方面,王红岩等[2]考虑了底盘动力学以及在稳定器的稳定控制作用下的火炮稳定性,并将动力油缸简化为一阶弹簧阻尼系统,炮控系统通过其控制器保证火炮的控制稳定性;通过机电联合仿真以及实验,分析了路面不平整度和车速对行进稳定性的影响。史力晨等[3]以地面-坦克-火炮系统相互作用过程中的动力学分析为基础,认为底盘振动影响不可忽略,利用Matlab/SimuLink环境建立车载火炮系统动力学原理的微分方程,对稳定系统进行控制,并对车体角位移和火炮角位移进行了对比以反映坦克行进中的火炮运动机理;李长兵等[4]通过对坦克稳定系统的动力学分析,计算出稳定器作用下的火炮扰动力矩,运用希尔伯特-黄变换(Hilbert-Huang transform,HHT)对扰动力矩进行时频谱分析,并建立了火炮扰动力矩谱测试系统,得到高速机动条件下控制系统功率和控制带宽等对稳定性的影响。
在坦克稳定系统控制方法方面,在基础的PID控制方法基础上,李杰[5]采用了自适应模糊滑模控制器设计,采用系统零点设计法来获得控制器的切换函数,对原有模糊控制的局限性进行了改进,加快了响应速度,并且对系统的参数摄动具有很强的鲁棒性。对于稳定器液压系统的控制,葛小川[6]利用AMESim与Simulink软件进行联合仿真,采用小波神经网络对PID算法进行优化,证明小波神经网络控制方法具有更好的响应速度。Karayumak[7]采用复杂耦合控制方法,建立了某主战坦克高低机电动控制系统的非线性模型,相对以往仅以摇架角位移为控制量,考虑了炮身柔性以及炮口摆动延迟,并少有地考虑了弹丸在身管内运动的影响,理论上达到了极高的首发命中率。
但对控制方法的研究离不开坦克整体动力学模型的仿真,所以坦克稳定系统是一个复杂的机电液混合系统,通过复杂的机电液系统耦合进行工作。影响坦克炮稳定性能的因素也是多样化的,包括路面条件、行进速度和液压系统结构性能都会对火炮稳定性造成影响。本文应用RecurDyn和AMESim软件进行机电液系统联合仿真,构建了坦克整车刚柔耦合动力学模型、控制系统和垂向稳定器液压系统模型,通过机电液系统耦合作用,对坦克行进间的稳定系统性能进行了评估,并对比了单侧、双侧稳定液压缸2种稳定器结构的稳定效果。
1 坦克行进间刚柔耦合建模
1.1 坦克稳定系统动力学模型
坦克稳定系统主要由陀螺仪组、液压放大器、动力油缸、补充油箱和角度限制器等部分组成[8],其中液压油缸布置在摇架一侧,其结构原理如图1所示。

图1 垂向稳定器结构原理图
坦克稳定控制又可分为调炮稳定控制和行进稳定控制。在行进稳定控制中,火炮摇架产生失调角,随后稳定系统中的角度陀螺仪和速度陀螺仪分别将火炮转动角度和角速度传输给控制系统,并产生补偿角和角速度,使火炮回到稳定位置。据上所述,建立坦克火炮高低向炮控系统动力学模型,如图2所示。图中,O为坦克车体质心,Ot为火炮耳轴位置,C为火炮质心;以OYZ坐标系为惯性坐标系,OtYtZt为动坐标系;Xpg为液压缸作用点与耳轴的距离,d1为俯仰部分质心与耳轴的距离;θ为动坐标系在惯性坐标系内的角位移,θt为火炮在动坐标系中的角位移;Fp为液压缸作用力;mg为火炮质量。

图2 坦克火炮高低向炮控系统动力学模型
根据系统作用力矩,得运动方程:
M=Mg+Mp+Mc
(1)
即

(2)

(3)
(4)
(5)
取车体初始俯仰角为0°,忽略行驶过程中瞄准线小角度的偏移,认为瞄准角大小不变。
1.2 路面不平度模型
路面不平度是指当路面不平整时,路面相对于基准高度所产生的关于路面长度变化的函数。由于路面不平度无法用明确的函数来描述,所以通常采用数学特征方差和功率谱密度函数来描述路面不平度情况。根据GB7031—2005机械振动-道路路面谱测量数据报告[9],路面功率谱密度可表示为
(6)
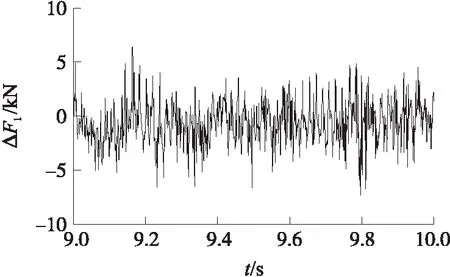
式中:n为空间频率,n0为参考空间频率,Gq(n0)为路面不平度系数,ω为频率指数,nd和nu分别为路面谱的上、下限空间频率。根据GB7031—2005,路面不平度分为8个等级,空间频率范围为0.001 m-1 (7) 本文所用的道路重构方法为滤波白噪声法,根据不同路面等级改变路面不平度系数,并利用Matlab程序根据不同仿真车速条件来模拟路面时域模型。 本文所用坦克仿真模型主要由底盘和火力系统组成。在动力学软件RecurDyn履带车辆模块Track(HM)中建立包括履带系统的整车动力学模型,同时运用三维路面谱程序,重构了长100 m、宽5 m的D级三维路面不平度模型,通过节点缝合法生成多体动力学软件可读取的路面文件,导入RecurDyn中的三维模型,如图3所示。 图3 坦克行进间多体系统模型 在建立火炮摇架与耳轴的接触时,考虑到真实情况中车体振动会通过耳轴-摇架接触碰撞传递到火炮,理想的旋转副并不能描述真实的振动传递路径[10]。带间隙的旋转铰模型不是通过约束自由度来限制其旋转运动,而是通过限制耳轴在摇架轴承内的运动碰撞来实现。所以分别建立身管与前后衬瓦的刚柔接触碰撞[11]以及耳轴-摇架的刚性接触,并利用C语言编写用户子程序,利用二次开发功能在软件中插入用户子程序。因为耳轴接触的存在,摇架在接触范围内可以做多自由度运动,动力液压缸与液压杆在分别与炮塔和摇架建立连接时,普通的旋转副连接会使摇架水平方向自由度受限,必须改用胡克副代替旋转副。 利用AMESim软件建立了坦克垂向稳定器近似液压伺服系统模型,如图4所示。该模型主要由动力油缸、电液伺服阀、PID控制器和接口模块等组成。接口模块中Fp为液压缸控制力,v为液压缸运动速度,s为液压缸活塞位移。 液压动力元件由液压放大元件和液压执行元件组成,本系统中即液压控制阀和液压缸组成的四边阀控液压缸。动力油缸采用对称液压缸,相比非对称液压缸,具有更好的稳定性,且不会产生突变和振动。具体液压参数设置包括:液压缸行程300 mm,液压缸缸径70 mm,液压缸杆径35 mm,溢流阀工作压力20 MPa,伺服阀最大流量100 l/min,伺服阀压降15 MPa,蓄能器气体压力9 MPa,齿轮泵额定转速1 500 r/min,齿轮泵排量45 ml/r。 图4 稳定器液压伺服系统 本文采用PID控制器来控制动力油缸,验证联合仿真模型的正确性。PID控制器又称比例-积分-微分控制器,由比例单元P、积分单元I和微分单元D组成,根据外界环境对坦克系统的扰动,计算并反馈给控制系统,从而生成对应的控制信号。PID算法表示如下: (8) 式中:Kp为比例增益系数,Ti为积分时间常数,Td为微分时间常数,u(t)为控制器输出量,e(t)为被控量与给定值的差值。 RecurDyn与AMESim之间的数据传输需要利用接口模块。在仿真过程中,由RecurDyn软件得出液压缸活塞的行程和速度,以及火炮摇架相对地面坐标系的角位移,通过接口模块传递给AMESim软件;将摇架角位移与给定发射角比对,得出偏差并反馈给伺服控制系统,对液压缸进行动作控制;最终得出油缸作用力,通过接口模块传回至RecurDyn软件,进而完成计算数据的闭环连接。 接口模块共设置有1个输入接口和3个输出接口,其中输入接口对应液压缸作用力,输出接口分别对应液压缸的速度、活塞的行程和火炮摇架垂向角位移。 令坦克以20 km/h的速度行驶在D级路面上,将坦克稳定角设定在0°,仿真10 s后得到摇架角位移和坦克车体角位移等相关数据。由于坦克启动时存在较大振动,取4 s后的稳定数据。将二者通讯间隔设置为1 ms。火炮稳定精度[1]为坦克行驶在起伏路面上时火炮摆动振幅的算术平均值: (9) 式中:N为采样的总点数,θj为采样得到的火炮高低向角位移。 根据现代坦克火控系统火炮垂向的稳定技术要求[13],垂向稳定精度应控制在0.5~1.5 mrad。考虑到现实情况中稳定器陀螺仪安装在摇架位置,所以以摇架位置垂向角位移θn作为度量稳定性的标准。 图5、图6为不同路面等级、不同速度工况下受控摇架处的高低角位移曲线。通过对比可以发现:坦克在D级路面上分别以20 km/h和30 km/h车速行驶时,稳定器控制作用下摇架稳定精度约为0.45 mrad和0.80 mrad;坦克在E级路面上分别以20 km/h和30 km/h车速行驶时,稳定器控制作用下摇架稳定精度约为1.54 mrad和2.22 mrad。可见D级路面下实际稳定精度要求完全得到满足,在恶劣的路面条件下稳定效果有所降低。 图5 D级路面摇架高低角位移曲线 坦克实际行驶过程中,摇架与耳轴之间存在的间隙等非线性因素是现实存在的,这将导致摇架产生较大的不稳定性。为了分析接触产生的非线性因素对摇架高低角位移的影响,计算了此条件下坦克行进间振动响应。图7给出了坦克在D级路面以20 km/h的速度行驶时摇架高低角位移的频域曲线。由图7可见,0.87 Hz的峰值主频率与坦克车体固有频率相同,在50.69 Hz处出现了小的频率突变。图8给出了右耳轴-摇架接触力F1频域曲线。由图8可见,在50.69 Hz的位置同样出现了频率峰值,这说明摇架与耳轴的接触间隙是造成高低角位移发生振动的原因之一。 图6 E级路面摇架高低角位移曲线 图7 摇架高低角位移的频域曲线 图8 右耳轴-摇架接触力频域曲线 由于坦克炮塔、摇架及身管部分质量偏心以及稳定液压缸安装在摇架右侧,两侧耳轴接触力不平衡,理论上振动在3个坐标方向上均有分量。为了对比不同动力液压缸布置方案对坦克炮稳定性产生的影响,考虑对称布置情况下的稳定情况,在原有稳定系统结构基础上,在摇架另一侧对称位置加装相同参数的动力油缸以减小因油缸布置引起的摇架受力不平衡。测试工况为坦克在D级路面上以20 km/h的速度行驶。 图9、图10分别给出了单侧和对称布置液压缸两侧摇架-耳轴接触力差ΔF1。由图可以看出2种方案左、右侧接触力差幅值和标准差均有较大差异:单侧布置液压缸方案下接触力差极值为12 915.86 N,标准差为3 961.94 N,两侧接触力差异较大,导致摇架两侧上、下摆动情况不等;对称布置液压缸方案下接触力差极值为6 436.68 N,标准差为1 839.17 N,两侧接触力差异明显减小。 图9 单侧布置液压缸两侧摇架-耳轴接触力差 图10 对称布置液压缸两侧摇架-耳轴接触力差 图11给出了2种方案的摇架垂向角位移对比曲线。摇架垂向角位移极值由原始方案的1.36 mrad减小为0.72 mrad,稳定精度由0.45 mrad提高到0.23 mrad,摇架稳定性得到了一定的提升。综合以上可以得出,稳定器布置方案对坦克火炮稳定性存在一定影响,对坦克稳定系统研究存在参考价值。 图11 不同方案摇架垂向角位移对比 本文基于多体动力学软件RecurDyn建立了坦克行进间刚柔耦合动力学模型,运用液压系统仿真软件AMESim 建立了坦克垂向液压稳定系统模型;控制方法采用PID控制,令坦克在不同路面等级下分别以不同速度行驶,验证了联合仿真模型的可行性,确保了垂向稳定器作用下坦克垂向稳定系统的精度。 对摇架垂向角位移以及摇架-耳轴接触力进行了分析,结果表明摇架-耳轴间隙对摇架高低角位移存在不利影响。在原有单侧稳定液压缸结构基础上,对比了双稳定液压缸对称布置方案下的摇架-耳轴接触力和摇架垂向角位移,结果表明:对称单侧布置方案会使摇架两侧出现较大不平衡振动,显然会影响行进间射击精度;对称布置方案具有更好的垂向稳定性,对坦克垂向稳定系统结构研究有一定参考价值。 本文在坦克刚柔耦合模型中只将身管视为柔性体,其他部件视为刚体,相对真实模型还有改进空间;本文电液伺服系统采用的PID控制方法对PID增益的变化很敏感,控制品质不高;同时液压系统还需要根据真实结构进行改进,并对液压系统参数进行优化。这些都将在今后工作中逐步完善。1.3 三维仿真模型

2 垂向稳定器液压伺服系统建模
2.1 液压系统建模

2.2 PID控制器数学模型
2.3 接口模块建模
3 联合仿真
3.1 模型可行性分析




3.2 稳定系统布置方案对比


4 结论