制导炸弹半实物仿真系统误差对仿真结果的影响
2019-03-27张培忠宁金贵
张培忠,高 坤,宁金贵
(中国人民解放军63850部队,吉林 白城 137001)
制导炸弹在研发设计、调试改进、试验鉴定的过程中,造价昂贵,需要动用飞机/无人机架次,且外场试验周期长、试验成本较高,不易采用大样本量的实弹试验,通常采用小子样实弹试验与半实物仿真相结合的办法,以减少实弹试验次数,节省试验费用。
然而,在制导炸弹半实物仿真过程中,由于半实物仿真环境设备(包括两轴转台、三轴转台、目标模拟器、负载模拟器、仿真计算机等[1],见图1)存在误差,会影响到仿真精度,进而可能影响到仿真结果的可信度。
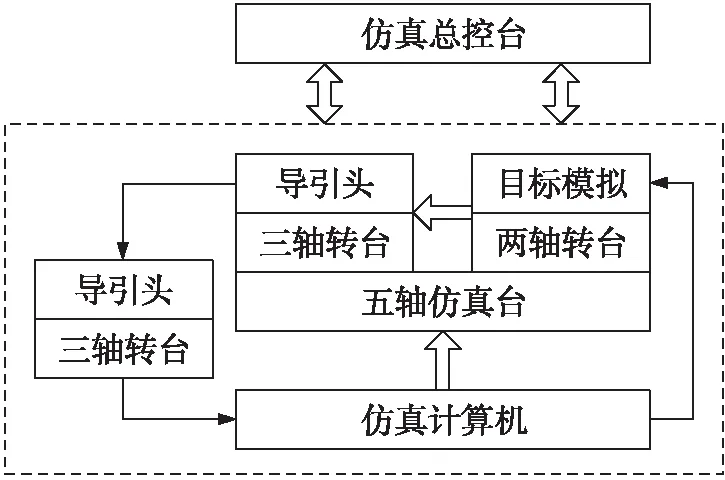
图1 半实物仿真结构图
文献[2]将半实物仿真应用在卫星姿态控制仿真中,比较了数学仿真与半实物仿真结构的差别。Andrianos等[3]研究了三轴转台因震颤、正交、交叉引起的误差,并提供减小误差的方法。Louis等[4]研究了三轴转台的不垂直度误差、动态特性误差、静态位置精度、轴的摆动等,给出了转台误差的理论表述形式。万士正等[5]运用蒙特卡罗法研究了导弹半实物仿真系统误差建模及影响,证明了三轴转台、负载模拟器、数据采集器是主要误差,将其误差模型施加到仿真系统中,修正了半实物仿真系统,提高了仿真精度。肖卫国等[6]研究了雷达寻的制导半实物仿真误差,包括仿真模型算法误差(截断误差、舍入误差)、仿真机接口误差(同步误差、量化误差、时延误差)、三轴转台误差(空间角误差、动态误差)、雷达目标模拟器误差,证明了仿真系统精度满足使用要求。丁长明等[7]研究了红外制导半实物仿真系统误差,以目标模拟器、三轴转台、负载模拟器为主要误差源,采用离散传递函数拟合各仿真设备的输入输出特性,据此构建数学仿真模型,获得仿真结果,并与实际系统试验结果比较,得出系统误差,其中全仿真系统的脱靶量误差小于3 m,并认为负载模拟器仿真结果对脱靶量影响大。康凤举等[8]应用协方差分析描述函数法(CADFT)研究了水下航行器半实物仿真精度,将三轴转台模型、水压仿真器模型、水下航行器运动数学模型联立,建立误差传播均值与协方差方程,获得了水下航行器运动仿真均值与方差,认为协方差分析描述函数比蒙特卡罗法更为精确。
上述国内外文献主要研究了半实物仿真系统误差的产生、结果与修正,尚未针对半实物仿真系统在装备试验应用过程中出现的现象进行机理探讨。
1 现象描述
在某型激光制导炸弹的仿真、实弹试验过程中发现:①在相同投弹高度h和投弹速度v0下,同一发制导炸弹多次仿真中,仿真俯仰角ϑ差别较大,如图2所示;②在相近投弹高度和投弹速度下,同一批次制导炸弹的投弹试验中,遥测俯仰角与仿真俯仰角差别也较大,如图3所示;③遥测俯仰角和仿真俯仰角均实现收敛,并且收敛趋势一致,保证了每次投弹试验、仿真都击中目标;④实测脱靶量Δr和仿真脱靶量Δs结果符合要求,且两者存在一致性,如表1和表2所示。

图2 同一发制导炸弹的俯仰角仿真结果
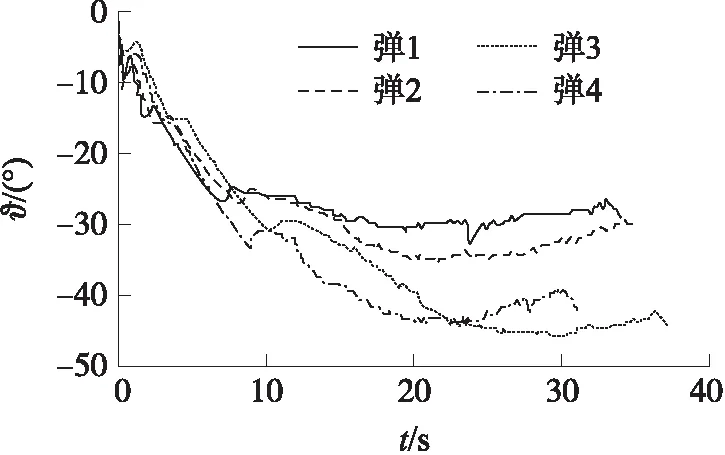
图3 同一批次制导炸弹的俯仰角遥测结果

表1 制导炸弹的仿真脱靶量结果
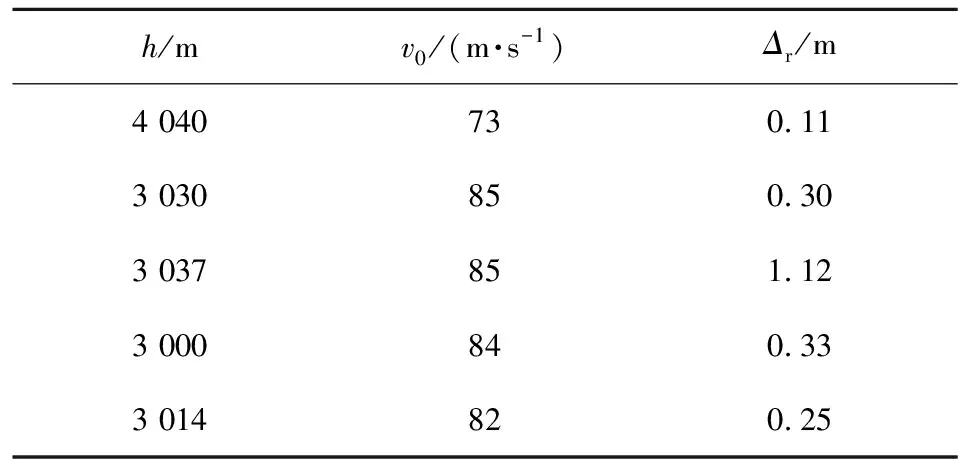
表2 制导炸弹投弹试验的脱靶量结果
分析以上现象,初步认为在制导炸弹半实物仿真系统中存在误差,导致同一发制导炸弹多次仿真的姿态角差别较大,并导致仿真姿态角与实测姿态角差别也较大。或许因为该误差较小,制导炸弹半实物仿真系统是收敛系统,最终可以使制导炸弹的姿态角收敛,并保证了导引头始终锁定目标,最终击中目标,未显著影响脱靶量。为了分析这些现象,需要研究制导炸弹半实物仿真系统的误差。
本文亦采用基于协方差分析描述函数法[8-10],建立制导炸弹半实物仿真系统的误差传播理论,从而确定出半实物仿真系统的误差传播过程、收敛特性及其最终收敛值,据此分析制导炸弹在仿真试验过程中出现的现象及其原因。
2 半实物仿真系统的误差
2.1 两轴转台的误差
两轴转台用于模拟目标相对于制导炸弹的视线角速度,其误差包括动态和静态两类。动态误差是由于2个轴的传递函数不为1而产生的幅值误差Δ|Φ(jω)|和相位误差Δ|φ(jω)|[11];静态误差是指2个轴的安装角误差,即高低视线角误差和方位视线角误差。由于制导炸弹采用比例导引,导引信息是视线角速度,因此静态误差对仿真结果影响很小。
2.2 目标模拟器的误差
目标模拟器实时提供目标、干扰及背景的模拟信号,这些信号随导引头瞄准方向、相对距离和大气传输条件实时变化。根据内部资料,目标模拟器误差对仿真结果的影响通常可以忽略。
2.3 三轴转台的误差
根据仿真计算机发出的姿态控制指令,三轴转台模拟弹体姿态的运动。设t时刻转台的理论姿态为俯仰角ϑ、偏航角ψ和倾斜角γ,则该时刻理论弹体坐标系Ox1y1z1与惯性坐标系Oxyz的转换矩阵为L(ϑ,ψ,γ)。

ΔΦ=|L(ϑ′,ψ′,γ′)I0-L(ϑ,ψ,γ)I0|
(1)
式中:I0为惯性系下的单位矢量。
根据三轴转台最大运动范围,取转台垂直度误差、回转精度、位置精度以及相交度误差的最大值,并叠加两部分误差,弹体姿态角静态误差的最大值为32.68″[11]。其数学模型为二阶系统,3个框的动态误差由二阶模型给出,动态幅值误差不超过10%,相位延迟不大于10°[5]。
2.4 负载模拟器的误差
在负载模拟器的工作频带10 Hz内,限定幅差和相差均为10%,计算出时间常数T和阻尼系数ζ,得到负载模拟器的数学模型[5]:
W(s)=1/(0.001s2+0.015 8s+1)
(2)
2.5 仿真计算机的误差
仿真计算机实时解算制导炸弹动力学方程、运动学方程、目标运动学方程和弹目相对运动学方程。解算运动学的误差为算法引入的截断误差和舍入误差,该误差很小,可忽略不计[6]。解算动力学方程的误差包括制导炸弹质量特性(质量、质心、惯性矩等)误差、作用力及力矩误差。因为很难精确建立气动方程,所以仅能利用风洞吹风试验数据,采用查表、插值法得到气动力和气动力矩。气动力和气动力矩的最大误差范围为-15%~15%[11]。
3 误差传播模型
3.1 误差分析原理
忽略目标模拟器的误差。虽然有负载模拟器的误差模型,但在制导炸弹飞行控制系统模型中没有相应的加载力矩项,也无法将其与飞行控制系统联立进行误差分析。本文仅以制导炸弹飞行控制系统模型、两轴转台传递函数、三轴转台传递函数为基础,基于协方差分析描述函数法建立均值和协方差传播方程,原理如图4所示,图中σ0和σt分别为协方差的初始值和任意时刻的计算值。

图4 仿真系统误差分析原理
3.2 协方差分析描述函数法简介
协方差分析描述函数法的基本步骤[10]:①建立仿真系统的状态方程,该状态方程一般是非线性的;②利用描述函数将非线性的状态方程进行统计线性化,成为线性状态方程;③利用协方差分析法,导出仿真系统响应的均值和协方差方程;④利用均值和协方差方程,求解仿真系统的误差。
3.3 仿真系统状态方程
在图4中,仅需要建立均值和协方差传播方程,其他模型和方程都是已知的。在制导炸弹飞行控制模型中,包括了目标状态变量(xt,yt,zt,vt,θt,ψt)、制导炸弹状态变量(xm,ym,zm,vm,θm,ψm,α,β,ωx1,ωy1,ωz1,ϑ,ψ,γ)、弹目视线角变量(qB,qH)等22个状态变量(符号均采用弹箭飞行控制力学通用符号[12],下文同)。
为了分析制导炸弹姿态角出现的差异现象,以视线角(qB,qH)、弹体旋转角速度(ωx1,ωy1,ωz1)、弹体姿态角(ϑ,ψ,γ)为8个随机状态变量,其余为确定性变量。
含有随机状态变量的方程为
(3)

其余含有确定性变量的方程是弹箭飞行控制力学的通用方程,在此省略。
3.4 非线性状态方程的统计线性化
随机状态变量方程(3)中含有非线性函数,需要运用描述函数理论对其统计线性化。
根据式(3)中的非线性函数的概率密度函数形式,求出一个拟线性表达式,用该拟线性表达式等效代替非线性函数,使得该式与非线性函数的均方差达到极小[10]。

据此,随机状态变量方程(3)中的非线性函数可以拟合为线性表达式,例如:
式中:


式中:

用类似方法完成其余函数的统计线性化。
3.5 仿真系统均值和协方差传播方程
将统计线性函数代入到式(3)中,整理得到均值传播方程和协方差传播方程:
(4)
(5)
式中:
在式(4)、式(5)中,协方差矩阵P的对角线元素分别是8个随机状态变量的均方差,非对角线元素是不同随机状态变量的协方差,该矩阵是关于主对角线对称的,N为拟线性系统动态矩阵。
将均值传播方程(4)和协方差传播方程(5)与制导炸弹动力学方程、运动学方程、目标运动学方程、弹目相对运动学方程和比例导引中确定性方程联立,并给定初始条件,就能求出各随机状态变量在每一时刻的均值和协方差。
4 计算实例
4.1 初始条件和参数
初始条件:①目标在同一水平面内做匀速直线运动或者静止;②制导炸弹具有轴对称性,其投弹点与目标运动直线在同一铅直面内;③结构参数及空气动力系数取自某型制导炸弹的风洞吹风实验报告;④大气参数参见国标GB/T1920—1980;⑤二轴转台和三轴转台随机状态变量之间的协方差不相关,二轴转台和三轴转台的各角度误差限均为±0.005°,三轴转台的角速度误差限均为最大转速的0.3%;⑥气动力和气动力矩的相对误差最大值为±15%。
初始参数:
②制导炸弹初始参数为xm0=3 000 m,ym0=-2 000 m,zm0=0,θm0=0°,ψm0=0°,ωx1=0,ωy1=0,ωz1=0,ϑ=0°,ψ=0°,γ=0°,qB0=-33.7°,qH0=0°,声速c=340.0 m/s,g=9.8m/s2。
③协方差初始参数为
4.2 计算
在二轴转台和三轴转台随机状态变量不相关的前提下,协方差矩阵P可简化为
将P代入式(5)中,得:
将确定性运动方程、随机性运动和控制方程、协方差传播方程分别建成3个Simulink计算模块,在Simulink中计算,其中,协方差传播方程计算模块如图5所示。
4.3 结果与分析
通过计算获得了制导炸弹俯仰角、偏航角和倾斜角的均方差值,如图6所示。从图6可以看出:制导炸弹仿真俯仰角的均方差是逐渐增大的,但是趋于稳定,最终稳定在0.75°;偏航角和倾斜角的均方差较小,最后收敛于0.05°。分析原因:制导炸弹投弹以后在重力作用下加速下降,所受气动力主要在俯仰方向上,因其误差较大,造成了同一发制导炸弹多次仿真的俯仰角差别较大;而偏航方向和倾斜方向受气动力都很小,因而误差亦较小。总之,在制导炸弹半实物仿真系统中,气动力和气动力矩是最主要的误差源,而仿真环境设备精度较高、误差较小[5-8]。

图6 制导炸弹的俯仰角、偏航角和倾斜角的均方差
同时获得了制导炸弹俯仰角速度、偏航角速度的均方差值,如图7所示。
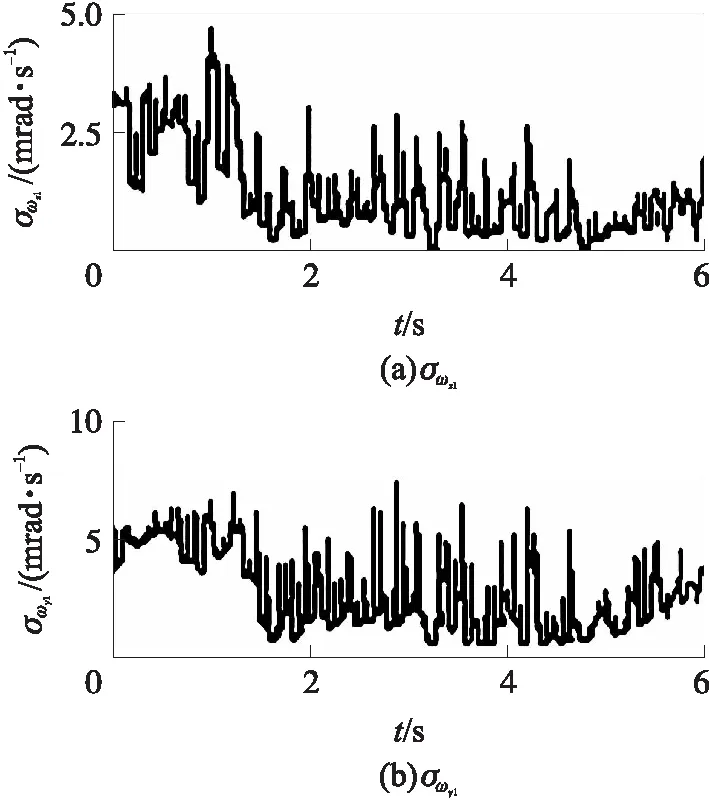
图7 俯仰角速度、偏航角速度的均方差
从图7可以看出,制导炸弹的俯仰角速度、偏航角速度的均方差都较小,有利于其姿态角稳定收敛及导引头锁定目标。
从图3可以看出,同一批次的多发制导炸弹实弹试验中,实测俯仰角也类似于仿真俯仰角的差异,原因也是各发制导炸弹在下落过程中受到的空气阻力作用有差异。因此,在制导炸弹仿真模型验模时无法运用时域法、频域法、时频域法等理论方法对图2、图3数据进行动态验模,仅能定性地分析姿态角的收敛趋势是否一致,以及导引头是否都锁定了目标。


5 结论
本文介绍了制导炸弹半实物仿真和实弹试验中的俯仰角差别较大、但收敛趋势一致的现象,以及仿真和实弹试验脱靶量具有一致性的现象。为了研究其原因,基于协方差分析描述函数法分析了制导炸弹半实物仿真系统的姿态角和姿态角速度误差,计算出姿态角和姿态角速度误差,以及仿真与实测脱靶量的一致性。通过研究得出以下结论:
①在制导炸弹半实物仿真系统中,气动参数的误差是影响姿态角的最主要误差源,而仿真环境设备精度较高,误差较小。
②制导炸弹仿真俯仰角的误差是逐渐增大的,但是最终趋于稳定值,这使得同一发制导炸弹多次仿真的俯仰角差别较大。
③制导炸弹的仿真俯仰角、实测俯仰角差别较大,姿态角不适用于动态验模。
④制导炸弹仿真系统的误差未显著影响脱靶量,制导炸弹的脱靶量适用于静态验模。