声矢量圆阵MVDR目标方位估计∗
2019-03-27亮闫
吴 亮闫 祎
(1.海军驻大连地区军事代表室 大连 116021)(2.大连测控技术研究所 大连 116021)
1 引言
MVDR波束形成是对常规波束形成方法的一种修正,这种有约束的线性最小方差滤波器,能够有效地抑制噪声的影响,可以实现较为稳健的谱估计,其空间分辨力也高于常规波束形成方法的分辨力[6~7]。相位模态域阵列信号处理是基于声场分解理论提出的一类新方法,其原理是将声场从阵元域变换到相位模态域,然后在相位模态域进行信号处理,或用于检测与定位[8~11],或用于声场分析[12]。本文研究了均匀声矢量圆阵的MVDR目标方位估计方法,首先利用变换矩阵将矢量圆阵阵元域信号变换到相位模态域,然后在相位模态域进行MVDR目标方位估计,最后给出了仿真和试验结果。
2 阵列模型
半径为r的M元均匀矢量圆阵位于xoy平面内,阵元1位于x轴,圆心与坐标系原点重合,坐标系采用右旋坐标系,远场平面波入射至矢量圆阵处,如图1所示。令入射平面波幅度为1,并假设平面波从垂直于z轴的方向入射,则声场中矢量圆阵处的声压p可分解为一系列复指数分量的和[3]:

其中,k=ω c是流体中的波数,bn=jnJn(kr)。
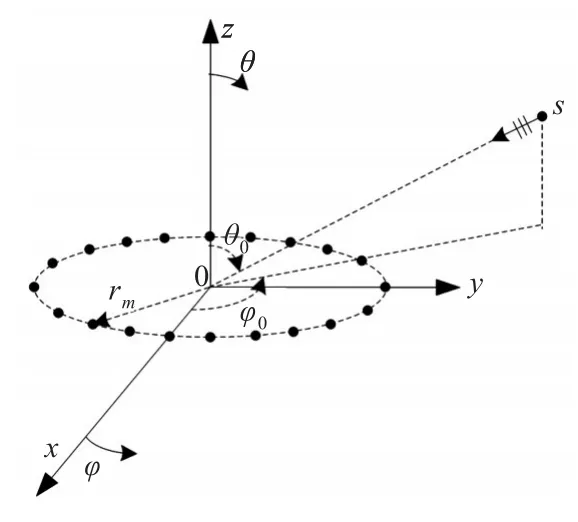
图1 阵列模型
声压场分解的第n阶相位模态为[5]

由Bessel函数的性质可知,一个均匀圆阵可激发的最大相位模态为表示取最大整数。可见,对于特定的kr,其声压场可以用有限个相位模态来逼近,则式(1)可以表示为

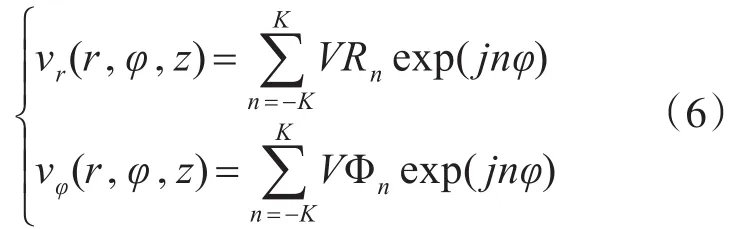
同理,并由Euler方程可求得径向振速场和切向振速场的第n阶相位模态:

其中,ρ为流体密度,c为流体中的声速。则r方向和φ方向的质点振速可表示为
3 矢量圆阵相位模态域MVDR目标方位估计
N个远场信号源(φ1,…,φN)入射到M个阵元的均匀矢量圆阵上。则无噪声时,l号矢量传感器输出的快拍数据为
番茄幼苗在3叶开始进入花芽分化期,夜间温度要控制在10~18℃之间,对花芽分化有利,不要长时间低于8℃以下,很易造成畸形果的发生,也不要高于18℃,易造成空洞果的发生。
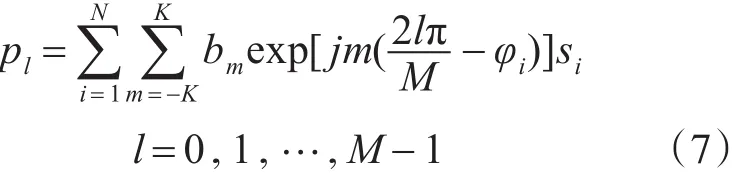
对阵列的声压快拍数据作空间DFT有
若令uq=v-q,则上式可写成如下的矩阵形式:
然后将上式写成矩阵形式有

令声压预处理矩阵为

我们发现利用声压预处理矩阵可以将复杂的圆阵阵列流型变换成一个相对简单的新矩阵变换后的声压相位模态域信号为

同理,定义径向与切向振速预处理矩阵Tvr、Tvφ分别为

其中,
Jvφ=由于对角矩阵Jvφ对角线上有零元素,对奇异矩阵Jvφ的零元素进行重构,重构方法为
变换后的径向振速和切向振速的相位模态域信号为


由式(11)、(12)、(13)可知,预处理矩阵Tp、Jvr和Jvφ可以将原来阵元域中的均匀矢量圆阵变换成相位模态域中的均匀矢量线阵,只不过这个线阵是一个虚拟的线阵。该虚拟均匀线阵与真实均匀线阵阵列流型不相同,其阵列流型为
给出一种基于矢量传感器声压振速相位模态域的协方差矩阵生成方法:

其中,L为快拍数。
可得基于MVDR算法的空间方位谱为[2]

4 仿真实验与性能分析

图2 不同信噪比时的阵列输出
图2是不同信噪比下目标的方位谱图,仿真条件如下:8元均匀矢量圆阵,圆阵半径r=0.3m,中心频率f=2500Hz的单个窄带信号从远场入射到阵列上,入射方位角φ0=180°,积分时间T=1s。图2(a)信噪比SNR=0dB,两种算法都能给出目标方位,PVMVDR方位估计性能较PMVDR方位估计性能有较大改善。图2(b)信噪比SNR=-9dB,PMVDR的输出背景明显升高,已无法给出目标方位的估计;PVMVDR的输出变化较小,仍然能有效估计目标方位,表明该算法对信噪比并不敏感,对各向同性背景噪声具有良好的抑制能力。PMVDR只是简单利用了目标信号以及背景噪声标量信息的空间相关性差异,从而获得阵列的指向性增益,所以在低信噪比时无法有效估计目标方位。PVMVDR则综合利用了矢量阵组合指向性增益和各向同性噪声背景声压振速的不相关性,与前者相比,无论是在高信噪比还是在低信噪比下都能更好地抑制噪声,提高检测和估计性能。
5 结语
圆阵在声纳系统中有着比较广泛的应用,比如现代艇艏声纳系统一般以圆柱或球形基阵为主,航空吊放声纳也常采用圆柱形基阵。本文提出了一种矢量圆阵声压振速相位模态域MVDR目标方位估计方法,本方法能够很好地抑制各向同性噪声,有利于远程弱信号的检测与估计。