基于面结构光自由曲面形面测量技术研究综述∗
2019-03-27张铁犁
靳 硕 张铁犁 王 蕾
(北京航天计量测试技术研究所 北京 100076)
1 引言
近年来,临近空间飞行器、可重复使用轨道飞行器等新型航天器迅速发展,其结构件的外形特征已突破传统的轴对称结构,往往设计为复杂非对称曲面,基于特征点的单点测量和校准无法提供足够的数据,难以做到精确的全尺寸测量。传统的点式接触测量将无法适应未来的发展,空间自由曲面、复杂内形面的测量问题将成为未来几何量测量的突出问题。
基于面结构光的自由曲面形面测量技术是一项非接触的主动测量方法,具有快速、全场、非接触、高密度点云、现场测量、非合作目标等诸多优点,在逆向工程、磨具设计、工业检测、质量控制、文物保护、医学成像、农业测绘、水下探测等领域取得了广泛应用,开展基于面结构光的自由曲面形面测量研究具有十分重要的意义。
2 面结构光测量方法
面结构光测量方法的基本原理是将计算机生成的已知相位光栅条纹图像(如图1)投影到被测物表面,从与投影方向成一定角度的方向观察,光栅条纹受到被物体表面深度不同的调制(如图2),相位发生改变[1]。变形的光栅携带了物体的三维形状的信息,通过解相和相位展开等技术,可以得出相位信息,进而利用三角法根据相位与物体空间坐标的转化关系求出物体的三维坐标。

图1 投影的光栅

图2 变形的光栅
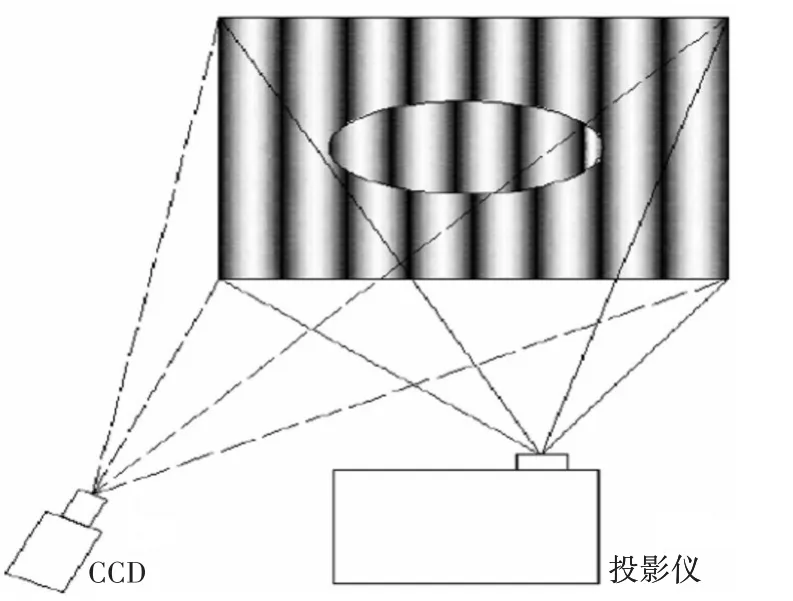
图3 结构光三维测量原理
3 面结构光自由曲面形面测量国内外研究现状
3.1 国内外技术研究现状
3.1.1 国外技术研究现状
电子技术与计算机技术的飞速发展推动着面结构光自由曲面形面测量技术日趋成熟。越来越多的研究学者致力于采用结构光测量法实现自由曲面形面的测量,从多种形式的结构光测量发展到运用编码、彩色、多频、外差式等结构光测量方法,并引入相位轮廓测量和傅里叶变换测量技术与多投射点投射、多方位测量的方法,能够对大范围、复杂面形,快速精确地进行测量。
1983年,M.Takeda与K.Mutoh最早尝试将傅里叶变换引入光栅图像处理中[2]。1984年,V.Sriniva⁃san 与 H.C.Liu[3]、Dr.Breuckmann[4]将相移法用于光栅投影技术中,为光栅投影法的发展和应用奠定了基础,M.Takeda与K.Mutoh成为了光栅投影法的发奠基人。此后,基于光栅投影法的光学三维测量技术向着高精度、高效率、实用化的方向迅速发展。
在20世纪九十年代,Dr.Steinbichler[5]、Dr.Wolf[6]及德国Technical University of Braunschweig的Rein⁃hold Ritter教授,分别成立了Steinbichler GmbH、Wolf GmbH和GOM GmbH,并相继推出了多款结构光测量系统,如:Steinbichler GmbH的C0MET5型结构光三维测量系统,GOM GmbH的Atos-II型结构光三维测量系统等。
2001年德国斯图加特大学Jens Gühring等[7]提出了一种编码方式的结构光测量系统,该系统由黑白相机及投影仪组成,采用线性变换的处理方法,有效地解决了传统相变处理时受到限制的问题。
2002年,美国华盛顿大学Li Zhang等[8]提出了一种彩色结构光技术,通过投射一种基于De.Bruijn编码序列的彩色条纹,并实现其边界匹配,用于从单幅或多幅图像中恢复物体的三维面形。
2005年,加拿大滑铁卢大学WongAndrewK.C.等[9]提出一种分等级的编码图案测量方法,该种编码图案由高亮度圆点、栅格线和内部灰度呈梯形变化的纹理的栅格构成,只需要投影一幅图案就可实现对目标的测量。该方法的缺点不适宜测量外部特征变化剧烈的物体。
2007年,美国加利福尼亚大学Young.M等[10]提出一种基于视点编码的三维测量方法。该方法将设定高频的黑白条纹图案投影至被测物体表面,并用多个相机从不同位置同时采集投影的图案信息,将时域编码转变为基于视点编码实现的条纹匹配,克服了测量系统对时间和空间连续性的限制。但该方法的缺点是系统实现过程繁琐,系统结构复杂。
2012年,Sandro Barone,Alessandro Paoli[11]等提出通过结构光立体成像,结合灰度算法对被测目标进行局部精确三维测量的方法,使被测目标与参考坐标进行自动匹配测量,这种方法的缺点是受到几何条件的制约。
2015年,德国马格德堡大学教授Erik Lilien⁃blum 和 Ayoub Al-Hamadi[12]将线扫描相机与结构光相结合,改进了线光源光强密度来产生不同光模式序列,通过时间相关性和相移特性实现光条纹编码,完成光模式与相机捕获线的同步转换,增加了系统的伸缩性,使其能够持续快速工作,为传送带上零件内部质量检查提供了新的思路。
3.1.2 国内技术研究现状
我国在该领域的研究开展较晚,但针对面结构光的自由曲面形面测量技术也在不断追赶国际先进水平,业已取得了丰硕的成果。
1989年,四川大学的苏显渝[13]等研制出基于激光结构光的三维面形测量系统;1993年,四川大学和西南石油学院采用Ronchi光栅离焦投影进行相位测量,成功研制了用于井底探测的三维外形测量系统[14]。
2003年,中科院沈阳自动化所刘伟军等[15]提出了一种单目测量方法,利用狭缝式结构光并结合回转机构和测头的移动机构,来获取复杂曲面物体的三维信息。采用Screw理论应用于多视角测量数据融合中,并使用最小二乘优化法优化坐标系参数的求取,降低了计算的复杂性,提高了系统测量的稳定性。实验证明该方法的测量精度可达0.1mm。
2010年,大连理工大学薛信庆[16]构造了一套采用排列组合方式形成的彩色空间编码方案,将四根彩色条纹组成一个组合,可以允许在同一个组合中不相邻的条纹相同颜色的重复,这样在测量面积相同的被测物体时,可以减少编码时所需颜色的种类,克服了解码过程中颜色识别的困难。
2012年,霍金城,吴庆阳[17]等提出一种部分编码结构光三维面形测量方法,将相位展开与条纹编码相结合,先整合条纹再进行相位展开,较大程度减少重建所需条纹幅数,具有良好的精度和可靠性。
2013年,上海交通大学张鑫[18]等提出一种随机编码结构光投影的双目立体视觉快速三维测量技术,仅需一次拍摄即可快速输出大量三维点云数据,能够实现动态测量,具有较高的测量精度以及较好的鲁棒性。
2015年,赵必玉[19]首次将曲波变换的图像去噪方法用于面结构光三维测量技术并提出一种任意摆放的面结构光三维测量系统及相应的系统标定技术,提高了系统的测量精度。
2017年,林辉[20]提出了一种快速、鲁棒、高空间分辨率的结构光图案编码方法。该方法采用基于格雷码的线移法生成正反黑白条纹图案,在图案解码时,对采集的条纹图像边缘的非线性轮廓做线性插值,通过求解交点得到亚像素精度的边缘坐标,由此达到较高的空间分辨率。
2018年,白宏运[21]提出了一种基于被测物体表面几何特征的自适应结构光空间编码算法,能针对特定的被测物体实现高分辨率编码,同时提出了一种基于色彩迁移技术的彩色结构光解码算法,该解码算法以编码图案的色彩分布作为先验知识,用色彩迁移的方法对相机捕获的结构光图像进行增强和去光照处理,还原结构光图像条纹的颜色信息。
3.2 国内外仪器设备发展现状
3.2.1 国外仪器设备发展现状
面结构光三维测量技术的研究和应用在国外开展较早,技术也都比较成熟。此项技术已实现产业化。
德国Gom公司开发的Atos系列流动光学三维测量系统[22]代表着国际先进水平。ATOS Core产品如图4所示。测量点距0.02mm,测量范围45mm×30mm至500mm×380mm,该系统使用参考点拼合技术,并结合先进的CCD相机定位技术,在测量过程中自动拼合,既消除了累积误差,又减少了后续拼合工作,大大提高大型件的扫描精度和速度。

图4 德国GOM公司ATOS Core
德国Carl Zeiss光电技术有限公司开发的Com⁃et系列三维数字化扫描系统[23],COMET6结构光测量系统如图6所示,该系列扫描系统的测量范围81mm×54mm×40mm至1235mm×823mm×600mm,最小点间距为16μm,最快测量速度小于1s。

图5 COMET6结构光测量系统
3.2.2 国内仪器设备发展现状
国内的面结构光测量技术研究起步相对较晚,目前还处于成长阶段,北京天远三维、北京博维恒信科技等公司推出了具有自主知识产权的结构光三维测量系统,但测量精度相对落后于国外产品。
北京天远三维科技有限公司[24]与清华大学相关课题组密切合作,推出的OKIO-5M三维扫描仪,测量范围100mm×75mm至400mm×300mm,平均点距0.04mm,扫描速度小于1.5秒,最高测量精度0.005mm。

图6 OKIO-5M型三维扫描仪
北京博维恒信科技发展有限公司[25]开发了3D CaMega CP-300便携式三维扫描仪,测量范围200mm×160mm至1200mm×960mm,单面扫描速度小于1s,最高测量精度0.02mm。

图7 3D CaMega CP-300便携式三维扫描仪
4 结语
从以上研究可以看出,国外结构光自由曲面形面测量技术的研究由于起步较早,已经取得了丰硕的研究成果,并将其广泛应用于工业领域,实现了结构光三维测量的商品化,在测量精度和测量速度方面均达到了较高水平。我国虽然也正在不断开发商品化的面结构光自由曲面形面测量系统,但由于起步较晚,测量技术较为薄弱,且产品相对较少,整体水平较国外还比较落后,尤其是在测量精度和系统稳定性两方面。因此,面结构光自由曲面形面测量技术在工业产品中的创新设计及广泛应用还需进一步的努力和更加深入的研究。