并行采集技术在1.5T 8通道相控阵线圈头颅3D TOF MRA中的优化:体模研究
2019-03-25,
,
(成都市第七人民医院CT/MRI室,四川 成都 610041)
并行采集技术是近年来应用于临床的MR快速采集新技术[1],大大加快了采集速度,已广泛应用于MRA[2]、动态对比增强MRI[3]、心脏MRI、全身MRI及胎儿成像[4],且可用于鉴别诊断良恶性病变[5]。尽管各公司并行采集技术原理基本相同,但所用名称却有所差别,GE公司将其命名为ASSET(array spatial sensitivity encoding technique),适用于相控阵线圈,可提高采集速度。本研究针对ASSET技术在8通道相控阵线圈头颅3D TOF MRA中的优化使用,探讨最优FOV和ASSET加速因子(ASSET reduce factor,以下简称为R值)。
1 材料与方法
1.1 实验材料 GE公司标准MR头颅水模,直径17.0 cm;体部水模,16.5 cm×22.5 cm×33.5 cm。
1.2 仪器与方法 采用GE Signal HDe 1.5T MR扫描仪,8通道相控阵线圈。将头颅水模置于线圈正中,两侧放置海绵垫固定,在靠近线圈处放置体部水模。先行定位像扫描,再行校准扫描,而后定位3D TOF MRA序列,保证校准扫描中心、MRA序列扫描中心与水模中心一致。因水模呈球形,故仅进行轴位扫描,并确保所有扫描的位置相同。3D TOF MRA扫描参数:TR最小值,TE 3.0 ms,翻转角20°,带宽25 MHz,层厚1.4 mm,矩阵288(频率编码方向)×192(相位编码方向),频率编码方向为前后,自动匀场,层间内插重建为2,共获得25幅图像。
1.3 实验步骤 依据校准FOV(calibration FOV, FOVc)不同分为A、B、C组,FOVc分别为30 cm×30 cm、35 cm×35 cm和40 cm×40 cm。
1.3.1 第1阶段 固定扫描FOV(scanning FOV, FOVs)为24 cm×24 cm,固定R值为2.00,相位FOV(phase FOV, FOVp)分别设置为0.75、0.88和1.00,对3组进行扫描,共获得9组图像。
1.3.2 第2阶段 先对A组扫描,固定FOVs为24 cm×24 cm、26 cm×26 cm,R值设置为2.00、1.75、1.50和1.25,分别扫描FOVp为0.75、0.88、1.00的3D TOF MRA序列,共获得24组图像。再对B组进行扫描,B组FOVs分别设置为24 cm×24 cm、26 cm×26 cm、28 cm×28 cm、30 cm×30 cm、32 cm×32 cm,R值和FOVp设置与A组相同,共获得60组图像。
1.4 图像质量评价 采用AW 4.4工作站,测量图像卷褶伪影及SNR(每组共25幅图像,选择中心层面第13幅图像进行测量)。测量两侧卷褶伪影间的最短距离(D,图1),因水模直径为17 cm,图像中无卷褶伪影时记为D>17 cm。以卷褶伪影间距D>14.36 cm为卷褶伪影及ASSET伪影消失。将ROI置于水模中心,测量信号强度,测量水模外5 mm处左上、左下、右上、右下4个角的信号强度并取其平均值作为噪声,计算SNR=信号强度/噪声。记录各组图像的采集时间(acquisition time, TA)和相位方向分辨率(resolution on phase direction, Rp)。
2 结果
2.1 第1阶段 随FOVc增大,ASSET伪影逐渐加重,C组伪影明显(图2)。FOVs和R值固定的情况下,FOVp相同时,A、B、C组间伪影间距D值总体差异不明显;A、B、C组间TA相同,SNR逐渐降低(表1)。
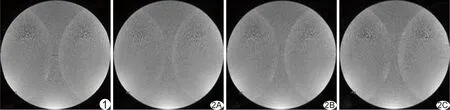
图1 卷褶伪影间距D测量示意图 图2 FOVs为24 cm×24 cm、R值为2.0、FOVp为0.75时,随FOVc增大伪影逐渐加重 A~C.为同层面A组、B组、C组MRA图像
FOVpA组D(cm)SNRB组D(cm)SNRC组D(cm)SNRTA(s)1.007.0122.936.9922.906.8422.89380.883.9122.763.8918.513.9115.86340.750.9613.420.9812.991.0512.0529

表2 A、B组在不同FOVs、FOVp和R值下卷褶伪影的间距D(cm)
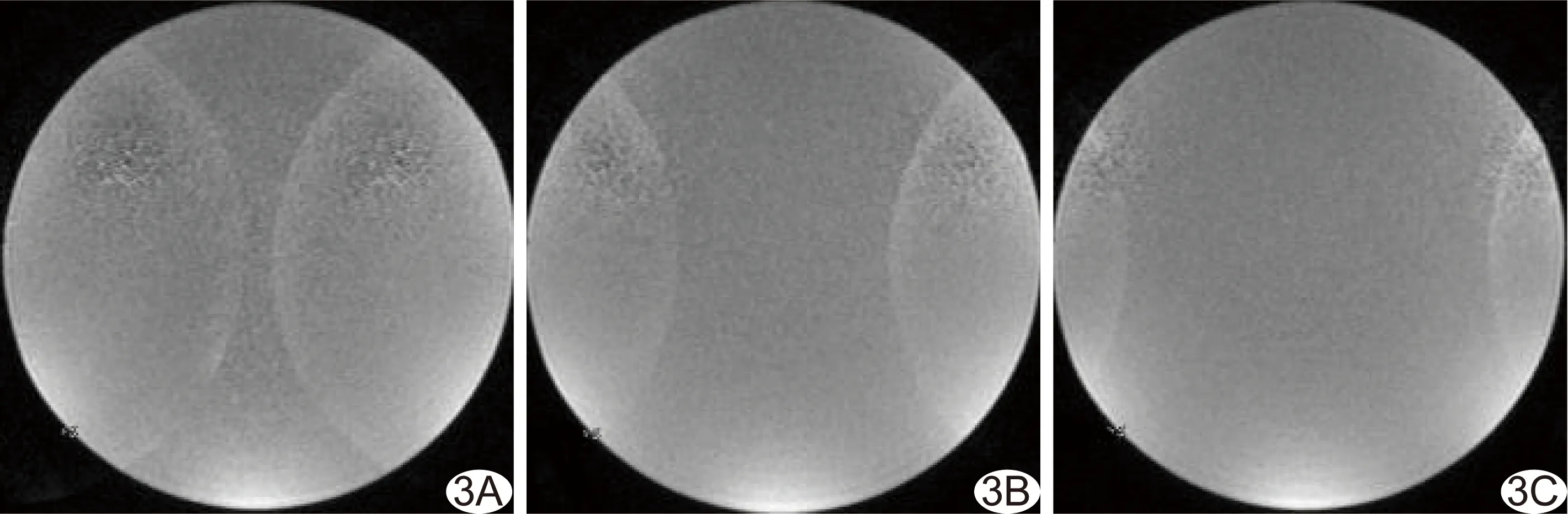
图3 固定FOVc=35 cm×35 cm、FOVs=24 cm×24 cm,A为R=2.0、FOVp=0.75,B为R=2.0、FOVp=1.0,C为R=1.25、FOVp=0.75,可见随R值降低和FOVp的增大伪影减轻
2.2 第2阶段 随着FOVs和FOVp增大以及R值减小,卷褶伪影间距D值逐渐增大直至消失(表2、图3)。A组中,当FOVs为26 cm×26 cm,R=1.25、FOVp=1.00、0.88及R=1.50、FOVp=1.00时,D>17.00 cm。B组中,当R=1.25、FOVs≥28 cm×28 cm时,D均>17.00 cm;R=1.50、FOVp=1.00、FOVs≥26 cm×26 cm时及FOVp=0.88、FOVs≥30 cm×30 cm时,D均>17.00 cm;R=1.75时,仅FOVp=1.00、FOVs≥30 cm×30 cm时,D>17.00 cm。
A、B组间FOVs=24 cm×24 cm和26 cm×26 cm的数据比较(表2),B组在FOVs=24 cm×24 cm,R=1.25,FOVp=1.00、0.88时,其卷褶伪影间距D大于相同条件下A组的D值,且D均>17.00 cm。
R值及FOVp不变,TA不变;R值固定时,SNR随FOVs及FOVp增大而增高;FOVs及FOVp固定时,SNR随R值增大而降低;Rp随FOVs及FOVp的增加而降低;见表3。
2.3 最优参数 以D>14.36 cm为标准,FOVc=35 cm×35 cm时,综合分析SNR、TA和Rp,当FOVs为28 cm×28 cm,FOVp为0.75,R=1.25时,TA为45 s,低于平均扫描时间(48.33±6.51)s,SNR为37.52,略低于平均水平(41.49±6.83),Rp为1.09 mm,高于平均水平(1.39±0.17)mm,故此参数组合为最优参数配置。
3 讨论
并行采集技术[6-7]是通过多线圈并行采集以增加K空间内采集位置的距离,达到减少K空间采样密度的目的,从而缩短扫描时间[8]。常用方法有SENSE技术[9]、SMASH技术和GRAPPAGE技术[10]。采用ASSET技术后,可提高采集速度,可在采集时间不变的前提下增加空间分辨力或增加3D采集成像的范围,提高图像质量并减少伪影[11]。另外,ASSET技术能大幅缩短扫描时间,有利于耐受性较差的患者以及扫描时间较长的序列,同时也减少了产生运动伪影的可能性。理论上最大R值可达到相控阵线圈的子线圈数目及相应的采集通道数,但由于ASSET技术采集的相位编码线减少,图像SNR降低,且SNR随R值升高而降低,当R值较大或线圈分布不合理时,可能出现未能完全去除的图像卷褶伪影,因此合适的R值选择尤其重要。并行采集技术也有其局限性,除SNR低外,还可能出现重建伪影,造成图像质量下降,有时需要同时采用其他技术减小ASSET伪影。田俊等[12]认为ASSET伪影的消除方法包括FOV及校准扫描范围需足够大,校准扫描定位要准确,线圈摆放位置要正确,确定线圈通道未损坏,校准使用线圈最大视野,FOVp选择1.00等,然而FOVc、FOVs、FOVp和R值的选择也特别重要。
既往研究[13]表明,我国华北地区男性颅骨最长径为14.36 cm,女性颅骨最长径为14.0 cm,且我国华北地区男青年体型比西南西北地区高壮[14],因此本研究以卷褶伪影间距D>14.36 cm为卷褶伪影及ASSET伪影消失。球形水模的卷褶伪影相对于球体直径完全对称,故本研究仅测量两侧卷褶伪影间的最短距离D。
本研究通过比较不同FOVc的伪影,认为FOVc不宜过大,也不宜过小,以35 cm×35 cm为最佳。对于FOVs,本研究结果显示,随FOVs增加,卷褶伪影及ASSET伪影逐渐减轻至消失,SNR则逐渐升高,同时,由于矩阵不变,分辨力也逐渐降低。对于FOVp,卷褶伪影常发生于相位编码方向,且ASSET技术也是基于K空间相位编码线的获取和填充,故增加FOVp有助于减轻卷褶伪影及ASSET伪影、提高SNR。本研究结果也显示随FOVp增加,卷褶伪影及ASSET伪影逐渐降低并向两侧移动直至消失,但随着FOVp增大,而相位编码步数不变,Rp降低,同时TA延长增加。ASSET技术最重要的一个因素加速因子R,R值增大使采集速度加快、TA减短,但同时卷褶伪影和ASSET伪影也随之加重。
综上所述,本研究通过对标准水模进行研究,结果显示选择FOVc=35 cm×35 cm,FOVs=28 cm×28 cm,FOVp=0.75,R=1.25时,可获得伪影较小、分辨力较高的MRA图像,且扫描时间较短,为上述条件下的最优参数配置。
