水下无人航行器主动目标自动检测方法研究
2019-03-14任宇飞吴玉泉黄海宁
任宇飞, 吴玉泉, 李 宇, 黄海宁
(1.中国科学院 声学研究所,北京 100190;2.中国科学院大学,北京 100190)
0 引 言
水下无人航行器自从20世纪中期出现以来,受到各国的高度重视。经过多年迅速发展,在水下地形探测、环境监测、探鱼和探矿等领域得到了广泛应用。相较于使用其他舰只执行类似任务,水下无人航行器具有成本低、生产周期短、无需人工干预等优点。探测声纳作为无人水下航行器的重要组成部分,承担了系统感知环境的重要任务。为了满足复杂环境下的任务要求,探测声纳所需要探索和实现的功能早已远远不是水下无人平台的“眼睛”这么简单,而必须承担部分“大脑”的功能,包括对目标存在、位置等参数进行估计和自动判决,时间维度上自动关联和跟踪等。文献[1]对水下无人航行器发展方向进行了梳理和展望,将目标自动判决作为重要的中长期重点发展方向之一提出。水下无人航行器在能量、尺寸等方面的限制,对实现目标自动判决也提出了很大的挑战。
目标探测声纳设备主要分为被动声纳和主动声纳两类。其中主动声纳发射声波信号,探测目标的反射波和散射波,从而定位目标。主动声纳的目标回波具有数据量大、混响背景复杂的特点,从中选取目标并估计目标参数非常困难。目前常见的主动声纳中,声纳员具有重要的地位,实现目标检测主要依赖声纳员的观察和选取。
在水下无人航行器系统中,传统的人工干预方法无法使用。为了使无人航行器具有自动判决的能力,其装备的探测系统需要实现主动目标自动检测。曲超[2]和Kalyan等[3]全面总结了恒虚警算法在主动目标自动检测中的应用。在混响环境下,恒虚警算法可能出现预设参数失配的问题,导致检测效果降低。哈尔滨工程大学的聂东虎等[4]使用高斯小波方法实现了主动目标自动检测,但局限于单通道时域信号的一维数据检测。游波等[5]提出了累积和检验算法确定主动回波门限,有效减少了虚警,但仍缺乏混响背景下目标检测的实例。国外很少发表有效的目标检测方法。因此,迫切需要实现一种目标自动检测方法,在混响背景下有效检测主动目标回波。
本文将目标自动检测问题转换为图像分割问题。将经过匹配滤波之后的主动声纳回波信号看作距离—方位二维灰度图像,主动目标检测问题即按照灰度值和区域关系从图像中分离出目标。通过预处理、求取梯度图像以及分水岭图像分割算法,实现主动目标自动检测。并在此基础上提出了一种主动目标自动检测的自适应阈值选取方法。采用某次海试主动回波数据,证明了本文方法在混响背景下可以有效自动检测主动目标,与恒虚警算法相比可以有效减少虚警。
1 主动声纳目标检测
主动声纳系统处理流程[6]如图1所示,通过发射预知的信号,接收目标回波并分析处理得到目标信息。其中最主要运算过程包括波束形成、匹配滤波以及目标检测等。经过波束形成以及匹配滤波的处理结果是一个随距离、方位变化的二维能量分布图。图中每个距离—方位点的能量值为一个像素,能量越强像素点亮度越高,代表存在目标的可能性越大。传统主动声纳目标判决主要依靠声纳员通过听测回波信号与观察声图进行人工判断[7],目标自动检测方法用于辅助声纳员判断。在无人航行器中,主动目标检测全过程必须自动完成,在无人条件下实现自动判决、分离主动目标,并得到目标参数。
混响是主动声纳目标检测中的主要干扰因素。混响由环境中非目标物体反射和散射的声信号共同形成,其形式往往与发射信号类似,因而在声图中亮度也较高。专家和学者们充分研究了混响的分布情况,建立了K分布[8]和Pareto分布[9]模型,以及混合分布模型[10]等对混响进行预测。这些模型的共同特点是非高斯分布,且似然函数的计算比较困难。图2为一帧主动声纳回波数据的距离—方位声能量图像。由于混响的存在,信号发射后1 s左右时间之内出现大量没有明显规则的亮点。

图1 主动声纳处理流程图Fig.1 Flowchart of active sonar processing
相比于舰船和潜艇平台,在水下无人平台上实现主动目标自动检测有一些新难点。第一、水下无人平台尺寸较小,内部空间有限,难以在结构上采取措施抑制自噪声,需要从检测技术角度减轻自噪声干扰。第二、水下无人平台搭载声纳孔径有限,主动声纳回波图像信噪比较低,几乎处处充满区域极值,对目标判决造成不利影响。第三、水下无人平台主要工作于浅海区域,背景混响强,信号发射后一段时间之内的图像中充斥着大量由混响产生的亮点,容易造成虚警。最后,水下无人平台由于体积和功耗的限制,运算资源有限,实时目标自动检测具有一定难度。
综上所述,为克服水下无人平台主动目标自动检测中的种种困难,非常需要一种有效、稳定的主动目标自动检测新方法。
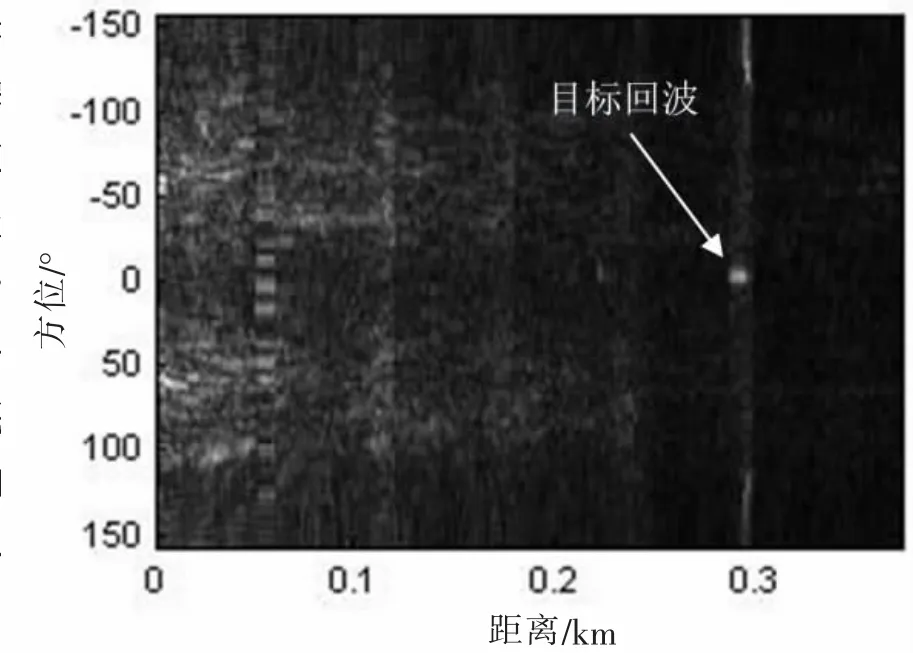
图2 距离—方位能量图Fig.2 An example of distance-beam energy
2 算法简介
本文采用的主动目标自动检测方法主要分为三个步骤:预处理、获得梯度图像以及图像分割。首先,通过预处理去除主动声纳回波声图中的大量局部极大值,防止分水岭算法产生图像过分割。本文中提供两种预处理方法:形态学重建和低通滤波。其次,梯度图像作为灰度间断程度的度量,为目标检测提供标准。最后,使用分水岭算法分割图像,得到目标的编号以及参数估计。
2.1 形态学重建
Vincent[14]率先使用形态学重建的方法预处理图像,极大改善了分水岭方法的过分割问题。本文使用建立在灰度形态学膨胀运算上的灰度形态学重建方法,根据发射信号的模糊度函数图以及阵列的角度分辨率,选择合适的结构元素B,对图像进行开运算,去除结构元素尺寸以下的极值。令原图像为J,其灰度形态学开重建定义为:

其中:符号 。表示开运算,⊕表示膨胀运算。灰度形态学重建是一个递推过程,其结束条件是递推稳定,即满足基于膨胀运算的灰度形态学重建也即对开运算图像不断进行有最大限制的膨胀操作,直到图像稳定。
2.2 低通滤波
灰度形态学重建方法虽然被证明是一种良好的图像预处理方法,但是其运算量较大,难以在实时探测的声纳系统中使用。中科院声学所的高丽等[15]提出了基于标记的一种新分水岭算法,利用低频滤波去除图像局部极值,运算量小且效果显著。
我们的目的是去除图像中不必要的极小值,减少干扰。认为这些极小值是干扰一般有两个原因:局部起伏过于频繁,或者起伏相比于图像亮度很小。为了减少起伏频繁的极小值,将主动声纳回波图像看作数字信号进行低频滤波。选取3阶巴特沃斯低通滤波器,对图像的行、列分别滤波。设定“采样率”为fs,截止频率由模糊度函数可以计算得到理论值。设模糊度函数中匹配结果半峰宽为l1,则距离轴向滤波的截止频率表示为:

同理,根据阵列角度分辨率可以得到波束方向滤波的截止频率。低通滤波处理从主动声纳回波图像中去除了宽度达不到半峰宽度且频繁起伏的极值。
2.3 自适应阈值选取
经过预处理的图像中,灰度值大幅度间断是目标最显著的特征。检测灰度值间断的一个重要方法是边缘检测算法。Canny[16]提出了一个近似最佳的边缘检测算法,称为Canny算子:首先用二维高斯函数的一阶导数对图像进行平滑操作;再用2×2邻域差值计算梯度的幅值和方向;之后保留幅值局部变化最大的点,细化幅值图像、抑制非极大值;最后检测和连接边缘,并使用双阈值方法减少错检。使用Canny边缘算子得到的梯度图像中剩余少量低起伏的极小值干扰。
设定阈值如下:

其中:I为梯度图像中所有像素灰度值的集合,λ是取值范围为0~1的相对门限值。剔除门限之下的边缘之后,对梯度图像进行分水岭运算得到分割结果。由于水下环境以及不同种类目标回波的不确定性,λ取固定值时目标自动检测稳定性较差。
为实现λ的自适应取值,本文研究了梯度图像的灰度分布。首先将梯度图像的灰度进行归一化,然后将梯度图像归一化强度划分为100个区间进行统计以减小随机误差。统计结果如图3所示,为显示清楚,将横坐标分为两部分显示,图 3(a)、(b)分别显示相对强度范围0-0.2以及0.2-1的能量出现频率。

图3 声图能量分布统计Fig.3 Statistics of energy intensity in an acoustic image
梯度图像归一化强度分布基本可以分为两部分,一部分如图3(a)所示,频率随能量梯度呈反相关,较为符合随机噪声梯度结果;另一部分则如图3(b)所示,频率与能量梯度之间呈反相关趋势但有所浮动,这是混响或目标能量的出现所造成的。理想的λ取值应该将背景与目标能量分开。本文中采用一个简化模型,在频率—归一化能量梯度曲线中,选取从0点开始第一个不符合反相关规律的数据点,对应的归一化相对能量梯度作为λ取值,认为混响和目标造成的灰度间断在λ之上。
2.4 分水岭算法
图像分割是计算机视觉领域的经典问题之一,也是最困难的任务之一。目前主流的图像分割算法在分割效果、适用性、运算量等方面各有特点,其中分水岭算法分割位置精准,能够提供精确到单个像素的完全封闭分割。分水岭图像分割方法应用非常广泛,在SAR雷达地理图像自动识别[11]以及侧扫声纳目标自动分类[12]中都取得了良好效果。
将分水岭算法用于图像分割的思想由Beucher等首次提出[13],将图像看成如图4所示的自然地貌,像素灰度看作地形图的海拔高度。高度的极小值位置及其附近地貌称作 “集水盆”,向每个集水盆不断注水。当两块集水盆即将因为不断注水而汇合时,在将要汇合位置建立无限高的“堤坝”。当所有像素只剩余水面和堤坝时,认为堤坝是图像分割的边缘,完成图像分割。

图4 分水岭算法原理示意图Fig.4 Schematic diagram of watershed algorithm
主动声纳目标回波结果是声能量分布图像,由于水声信道的复杂性,局域不均匀现象非常严重。如果直接使用分水岭算法分割主动目标回波图像,将产生无法容忍的大量虚警。分水岭算法对图像局域起伏非常敏感,即使在肉眼无法分辨的亮度变化区域有时也会产生分割,形成过分割现象。为解决分水岭算法的过分割问题,学者们做出了大量研究和试验,提出的解决方法主要分为两类:分割前减少图像极小值;或分割后合并彼此接近的分块。本文所研究的主动目标回波图像结构复杂,局域起伏多,合并相似分块的方法需要处理大量的分块,无论计算逻辑、计算量还是程序实现上都将相对复杂。因此,我们从预处理图像的分水岭算法着手解决这一问题。使用分水岭算法处理主动目标回波,将图像自动划分为目标、背景,算法具有准确性和稳定性。
3 试验结果
试验中无人航行器上搭载了信号处理机、发射和接收基阵。发射阵为单个的换能器,安装在航行器艏部,接收阵为两个有一定夹角的直线舷侧阵,分别嵌入安装在航行器两翼,探测角度范围-157°-157°。近似认为发射阵和接收阵处于同一位置。将一个应答器固定在母船上模拟点状目标,与水下无人航行器处于相同深度,目标强度设置为6 dB。经过波束形成以及匹配滤波后得到回波图像。
选取一段无人航行器距离母船较近,目标位于混响背景下的数据,共60个周期,总时间15 min。分别使用恒虚警(CFAR)算法、两种不同固定阈值下的灰度形态学重建分水岭(MP-Watershed)算法、两种不同固定阈值下的低通滤波分水岭算法 (LP-Watershed)、自动阈值下形态学重建分水岭算法(ATMP-Watershed)和自动阈值下低通滤波分水岭算法(ATLP-Watershed),进行自动目标检测。

图5 目标检测结果对比图Fig.5 Result comparison of different target detection methods
选取一个比较具有代表性的周期,目标位于155°,230 m左右。几种方法的目标自动检测结果对比如图5所示,分割边界用黑色线表示。其中第一行图像从左至右分别为ATMP-Watershed算法以及取固定值0.2、0.3时MP-Watershed算法目标检测结果。第二行图像从左至右分别为ATLP-Watershed算法以及λ取固定值0.2、0.3时LP-Watershed算法目标检测结果。λ取0.2时MP-Watershed算法虚警较多,LP-Watershed算法给出了较好分割。λ取0.3时两种固定阈值算法都没有检测到目标,LP-Watershed算法给出了较少的虚警。自动阈值方法分割结果检测到了目标,且相对固定阈值方法中λ取0.2时虚警较少,更为符合人工判决结果。
统计所有目标检测结果,得到检测概率及平均每个周期的虚警数如表1所示。

表1 自动检测结果统计Tab.1 Statistic result of autonamous target detection
CFAR算法目标检测虽然采用了经过试验后相对较为理想的相对阈值,但是检测结果仍然不稳定,产生了大量虚警。当λ取固定值0.2、0.3时,MP-Watershed算法从高亮度像素分布形状和参数两方面都给出了对检测到的潜在目标的描述。其中λ取0.2时检测出了所有目标,但是虚警率较高;λ取0.3时将虚警率控制在较低水平,但是出现了漏警。当λ取固定值时,LP-Watershed方法与MP-Watershed方法目标检测结果类似:λ取0.2时一些回波检测结果出现了较多虚警,而λ取0.3时一些回波检测结果出现了漏警。
ATMP-Watershed算法和ATLP-Watershed算法均正确检测出了所有目标,与CFAR算法以及固定阈值方法相比较,明显减少了虚警的出现。对比两种预处理方法,形态学重建算法比低通滤波算法去除局部极小值的能力好,检测结果虚警少。
在Matlab环境中,得到几种方法的平均运算时间如表2所示。

表2 运行时间Tab.2 Running time
可以看到恒虚警算法耗时最长,LP-Watershed方法耗时最短。自动阈值的ATMP-Watershed和ATMP-Watershed方法都较对应的固定阈值方法耗时长0.7 s左右,用于自动阈值的计算,但是仍然具有较好的实时性。
4 结 论
本文将水下主动目标检测转换为图像分割问题,提出了一种水下无人航行器主动目标自动检测方法。首先,分别通过形态学重建和低通滤波两种算法对图像进行预处理,去除大量无序噪点。其次,采用Canny边缘算子计算得到梯度图像。最后,使用分水岭算法分割图像,得到目标编号以及参数估计。在声图能量梯度统计基础上提出了自适应阈值选取方法。经过试验数据的检验,本文方法可以在混响背景下有效检测到目标,相比于传统的恒虚警算法检测结果更加稳定、运算量更小,适合于水下无人航行器主动目标自动检测的实时实现。