陆用定位定向系统自主导航技术
2019-03-13李殿茜
刘 辉, 刘 畅, 李殿茜, 王 琦
(北京自动化控制设备研究所,北京 100074)
0 引言
近年来,随着对平台机动作战和自主精确打击能力需求的不断提高,实现武器无固定阵地的无依托随机发射,要求陆用定位定向系统在长时间内实时、自主、准确地确定系统的位置、航向及姿态信息,并降低部队作战保障要求。
陆用定位定向系统中的惯性与里程信息、地标信息、零速停车信息、卫星信息的组合导航技术已经成熟并实现工程化应用,但仍存在一些不足:惯性/里程计组合导航在大范围、长时间工作时,其递推计算的载体位置会产生累积的定位误差(与行驶里程、里程计刻度系数误差和航向误差成正比);地标修正所需的地标点需事先通过测绘确定,另外,复杂的战区环境或工程建设可能导致地标点消失而无法使用;零速修正需要间断停车,不利于武器作战平台的快速机动;卫星导航易受战场电子干扰、地形等外部环境的影响[1]。
本文提出了一种基于旋转调制的惯性/里程计/地图匹配组合导航方案,通过旋转调制导航抵消惯性器件误差的影响,利用航位推算隔离载体加速度和速度对罗经效应的影响,使航向误差完全可观,提升实时估计与修正精度,最后通过引入地图匹配技术进行自主定位,解决了陆用定位精度与行驶里程相关的问题。
1 陆用旋转调制导航
惯导系统旋转调制是获得高精度导航的一项重要技术,旋转机构带动惯性测量单元(Inertial Measurement Unit,IMU)周期性地在地理坐标系中转动,自动抵消常值漂移产生的导航误差[2]。旋转调制惯导系统相当于在捷联惯导系统的基础上增加了旋转机构和测角装置,导航解算采用捷联惯导算法,计算出载体的速度和位置信息;载体姿态信息利用IMU姿态角和测角装置实时测量IMU相对载体转动的角度进行求取[3]。
旋转调制惯导系统惯性导航解算方法、惯性器件的常值漂移没有改变,误差方程与捷联惯导系统一致[4],表示如下:

(1)
(2)

(3)

(4)

由于惯性器件存在随机误差,旋转调制导航在长时间导航时依然会存在残余误差,累积一定的航向误差。由于旋转调制惯导系统陀螺漂移可进行调制,根据罗经效应误差传递规律为:
(5)

因此,陆用定位定向系统一般采用绕航向轴周期旋转的单轴旋转调制方案,在旋转调制过程中水平漂移会抵消,利用罗经效应原理通过惯性/里程计自主组合进行航向误差的在线估计与补偿。
2 定向误差自主抑制
2.1 定向误差自主抑制机理
惯导系统在导航状态下,航向误差在惯性导航中会引起水平测量轴偏离水平轴,引起水平方向随时间积累的速度误差,即罗经效应。里程计测量值通过姿态矩阵投影导致的地理系速度误差与航向误差和行驶速度成正比,同时惯性导航由于航向误差的存在也会引起与行驶速度成正比的速度误差,所以惯性/里程计组合无法通过载体机动激励航向误差,只能利用罗经效应原理估计航向角误差。由于载体机动产生的惯性速度误差会对分离罗经效应产生不利影响,须推导适合动态情况下采用罗经效应的误差方程。
惯性/里程计组合导航系统采用速度组合方式,里程计的速度测量值通过姿态矩阵分解到导航坐标系后,作为基准信息观测惯导系统的速度误差,获得卡尔曼滤波的观测值。利用闭环卡尔曼滤波技术进行误差估计和校正,特别是航向误差的校正可逐步提高利用里程计测量值观测惯性导航速度的精度,从而提高滤波估计和校正的精度,有效减小惯导系统的误差积累[5]。
2.2 适应罗经效应的误差方程
2.2.1 坐标系定义
导航坐标系采用当地地理北天东坐标系,载体坐标系(oxbybzb)的oxb指向载体前进方向,oyb垂直载体纵轴向上,ozb由右手规则给出。导航坐标系是分别绕其3个轴依次旋转载体航向角、俯仰角和滚动角后形成的坐标系。由于实际导航坐标系为计算地理坐标系,与实际地理坐标系之间存在误差,常用3个失准角表示:北向失准角φN、航向失准角φU和东向失准角φE[6-7]。
2.2.2 惯导误差方程
惯导/里程计组合导航系统中,通过里程计航位推算获得的速度和位置精度优于惯性导航解算结果。为了简化惯导/里程计组合的误差方程,惯性导航计算过程中均采用航位推算结果计算载体速度引起的导航坐标系的转动,因此惯导姿态误差方程为:


(6)

为了获得可用的惯导速度误差方程,忽略垂向速度,惯导速度采用以下公式描述:
VN=VX-VZφU+ΔVX
VE=VZ+VXφU+ΔVZ
(7)
式(7)通过微分和积分变化,可以获得以下速度误差方程:
(8)

可以看出,以上水平加速度对速度误差的影响可忽略不计。
2.2.3 航位推算误差方程


(9)

2.3 滤波器设计
通过对惯导/里程计组合导航系统的性能和误差源的分析,忽略高度方向的影响,建立系统状态变量:

(10)

系统状态方程为:

(11)
系统的量测方程为:
Z(t)=H(t)X(t)+V(t)
(12)

2.4 试验验证
为了验证算法的可行性,采用某光纤定位定向系统进行了长航时车载试验验证,定位定向系统单轴旋转寻北精度优于1′、陀螺零偏精度优于0.01(°)/h,车载试验结束后试验车保持不动进行再次对准,所得航向作为长航时导航的航向基准。3次车长航时导航试验结果如表1所示。

表1 长航时导航航向精度统计
从表1中可以看出,导航过程通过单轴旋转调制惯性/里程计组合,长航时导航航向误差可以得到有效抑制,与对比结果相比控制在1.5′以内,实现了航向误差不随导航时间发散。
3 惯性/航位推算/地图匹配导航
3.1 地图匹配原理
地图匹配是一种基于软件技术的定位误差修正技术,依靠精确的数字地图和完善的地图匹配算法实现道路信息与车辆定位信息之间的匹配[11]。将惯导系统获取的车辆位置或行驶轨迹,与车载数字地图的道路数据进行比较,经过地图匹配后,找到车辆所在的道路,并且确定车辆在道路上的具体位置。不难看出,整个地图匹配可分为2个相对独立的过程:1)寻找车辆当前行驶的道路;2)确定车辆在当前道路上的具体位置[12]。
惯性/里程计组合导航虽然可以提高导航精度,但在大范围、长时间工作时,其递推计算的载体位置会产生累积的定位误差。而地图匹配技术需要其他导航定位方式为其提供待匹配的定位点,才可以结合高精度数字地图,进而得到较高精度的位置信息。因此,利用地图匹配导航技术能够与惯性导航形成良好的互补,加上里程计辅助,从而形成惯性/航位推算/地图匹配导航,如图1所示。

图1 惯性/航位推算/地图匹配导航原理图Fig.1 Principle diagram of INS/DR/Map-Matching navigation
3.2 空间索引建立
空间索引是指依据空间对象的位置和形状或空间对象之间的某种空间关系,按一定的顺序排列的一种数据结构。作为一种辅助性的空间数据结构,空间索引介于空间操作和空间对象之间,它通过筛选作用,大量与特定空间操作无关的空间对象被排除,从而提高了空间操作的速度和效率[13]。
对于地图匹配而言,快速搜索出车辆附近一定范围内的路段,作为匹配计算的道路信息输入,直接影响匹配效率。因此,需对数字矢量地图数据进行预处理,以建立从地图道路数据库中快速搜索路段信息的空间索引。具体做法是建立地图网格索引和建立路段间连通性空间拓扑关系。
3.2.1 建立地图网格索引
空间填充曲线可以将高维空间中没有良好顺序的数据映射到一维空间,经过这种编码方式,空间上相邻的对象会邻接存储在一块,可以减少I/O时间,提高内存中数据处理效率。如图2所示,将地图自左而右、自下而上按固定步长划分成N×N个网格区域,每个网格都给以唯一的编号。完成地图网格划及编码分后,分别判断各条路段的外接矩形框与各个网格区域的位置关系,并将路段号与网格编码对应存储,方便查询。

图2 地图网格划分及Hilbert编码Fig.2 Map grid division and Hilbert coding
利用车辆定位点搜索待匹配路段时,首先利用公式求取车辆所在网格的空间坐标,然后根据网格维数N和空间坐标,通过一系列位运算求取定位点所在网格的Hilbert编码H,进而找到该网格内的路段。
(13)
式中,(X1,Y1)和(X2,Y2)为整个地图区域边界的左下角顶点和右上角顶点坐标;(x0,y0)为定位点坐标;(xp,yp)为定位点所在网格的空间坐标;[ ]为向下取整。
3.2.2 建立连通性拓扑关系
对于无拓扑关系的矢量地图数据,为了快速地确定候选路段,提高确定匹配路段效率,研究路段之间的连通性十分重要。由于车速是有限的,在一定时间范围内,车辆离开上一匹配路段后,只能行驶在与之相连的路段,而不可能在其他路段上行驶。
分析数字矢量地图道路数据存储结构,通过比较各路段起止节点的坐标值,认为具有公共节点的两路段存在连通关系,如图3所示。建立路段间的连通性拓扑关系表(见表2),确立了路段节点和其相连通路段之间的索引关系。
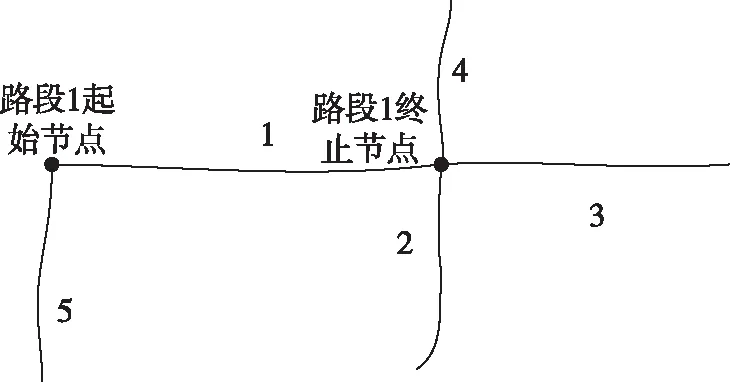
图3 连通性拓扑关系示意图Fig.3 Diagram of connectivity topology
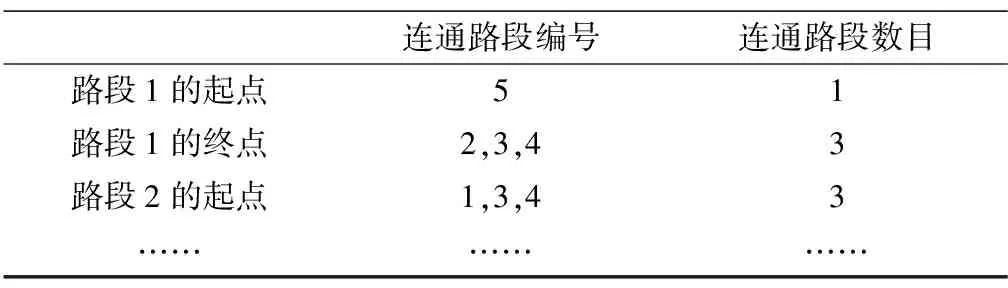
连通路段编号连通路段数目路段1的起点51路段1的终点2,3,43路段2的起点1,3,43………………
当车辆离开上一时刻的匹配路段时,利用路段的编号及路段端点,从拓扑关系表中快速找到对应的连通路段作为候选路段进行匹配,进而极大地节省了寻找候选路段的搜索时间,并且可以减少误匹配现象的出现。
3.3 地图匹配算法设计
地图匹配算法可以看作是一个模式识别的过程。一个完整的地图匹配算法一般包括3个大的步骤:1)确定误差区域,找出车辆附近的所有待匹配的候选路段;2)从所有候选路段中确定车辆当前所在路段,即匹配路段;3)确定车辆在当前路段上的具体位置,即匹配点[14]。
3.3.1 候选路段的确定
根据车辆行驶状态的不同,候选路段的选取准则也不同,可分为下面3个状态:
1)初始状态,初始时刻没有历史信息可以利用,此时,取和定位点为几何中心的搜索框相交的路段作为候选路段。
2)跟踪状态,若此刻车辆没有离开上一时刻确定的匹配路段,则该路段即为此刻车辆的候选路段也就是匹配路段。相较于上一时刻,匹配路段没有变化。
3)更新状态,若车辆离开上一时刻的匹配路段,则查询拓扑关系表,找到和上一路段相连通的所有路段作为候选路段,匹配结果将是对上一时刻匹配路段的更新。
车辆与路段的位置关系,可利用式(14)判断,当满足0<η<1且d<ε(ε为节点圆半径)时,认为车辆没有离开该路段[16]。

(14)
式中,(xo,yo)为惯导输出车辆的定位坐标; (x1,y1)和(x2,y2)为某一路段的起始节点和终止节点的坐标。
3.3.2 匹配路段的确定
设某一时刻定位点到候选路段的距离为di,车辆行驶航向与路段方向夹角为Δθi,则定义匹配度fi,有

(15)
其中,wd、wθ分别表示距离因素和方向因素在匹配度中的权重系数,满足wd+wθ=1。由式(15)可知,定位点到路段的距离越小,车辆行驶航向和路段方向夹角越小,则匹配度越大,说明该路段是当前车辆所在道路的可能性就越大[15]。因此,在匹配过程中,求出定位点对于各个候选路段的匹配度,取匹配度最大的候选路段为车辆的匹配路段。
3.3.3 匹配点的确定
匹配路段确定后,将车辆定位点向匹配路段上做投影,投影点作为车辆在路段上的匹配点。匹配点(xp,yp)求取如下:

(16)
3.4 试验验证
采用某型号定位定向系统进行车载试验,试验结果如下。其中,车辆以惯性/航位推算组合位置信息作为地图匹配输入,数字矢量地图文件事先装载到系统导航计算机中。
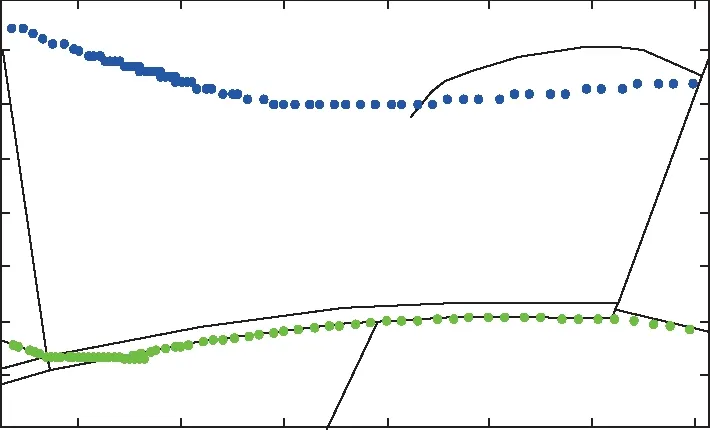
如图4、图5所示,以道路地图为背景图,将卫星导航、惯性/航位推算导航以及惯性/航位推算/地图匹配导航三种导航方式得到的行车轨迹进行比较。惯性/航位推算导航以及惯性/航位推算/地图匹配导航定位误差统计结果如图6所示。其中,将卫星定位结果作为参考基准。

图4 行车路线的匹配结果整体图Fig.4 The integral map of route matching result
(a)

(b)

(c)

(d)图5 匹配结果局部图Fig.5 The partial maps of route matching result
通过图4、图5可以看出,本文设计的地图算法除了在车辆正常行驶时能够匹配到正确道路上,并且在单、双路段变换(图5(a)),转弯(图5(b)、 (c)),平行双向路段(图5(d))等特殊路段具有较好的匹配效果,说明该算法具有较高的道路识别精度和容错能力。
从图6中可以看出,利用地图匹配可将经度误差从49m提高到20m,纬度误差从65m提高到15m。证明惯性/航位推算/地图匹配导航方式对惯性定位定向系统位置误差具有较好的抑制作用。
4 结论
1)利用旋转调制导航技术,抵消惯性器件误差的影响,从而利用罗经效应原理,通过惯性/里程计组合抑制航向误差随导航时间的漂移,可有效降低定向精度受导航时间、器件常值误差的影响。
2)通过建立数字矢量地图空间索引,并在此基础上设计地图匹配算法,以高精度数字矢量地图为模板,实现了惯性/航位推算/地图匹配导航,可有效解决定位精度随行驶里程发散的问题。
3)通过车载试验验证了本文方法的可行性和准确性,为长航时大作战半径情况下的高精度定位、定向提供了解决途径。
