融合叶位光合差异的设施黄瓜立体光环境优化调控模型
2019-03-06张海辉来海斌
张海辉 张 盼 胡 瑾 来海斌 高 攀 李 斌
(1.西北农林科技大学机械与电子工程学院, 陕西杨凌 712100;2.农业农村部农业物联网重点实验室, 陕西杨凌 712100;3.陕西省农业信息感知与智能服务重点实验室, 陕西杨凌 712100)
0 引言
黄瓜是我国主要设施作物之一,属喜光而耐阴性植物,其干物质积累的程度以及果实的优产优质主要决定于整株的光合作用[1-3]。相关研究表明,作物整株光合作用不仅与外界温度、CO2浓度、光照强度等环境因子显著相关,同时与不同叶位的光合能力密切联系[4-7]。花果期黄瓜植株一般分为顶叶、中部叶位、下部叶位3部分,顶叶为初生叶,光合机构发育不健全,光系统中的叶绿素含量较少,光合能力较弱,中下部叶位多为功能叶,光合机构发育较完善,光系统中叶绿素含量较多,光合能力较强[8-9]。传统补光多以功能叶位光合能力为基准采用冠层补光方式,由于叶片遮挡以及光照强度随距离增加而衰减,造成顶叶补光过多,中下部叶位受光不足,导致整株光合积累受限,不能充分利用不同叶位的光合能力以实现光能优化利用和最优光合积累[10-11]。
近年来,众多学者针对不同叶位光合特性差异性进行了相关研究[12-16]。研究表明不同叶位光合能力存在明显差异,但未能针对此差异性进行作物光环境调控模型构建。
目前,光环境优化调控模型以光合速率生理模型为基础,在预测算法及建模方法方面已开展研究[17-18]。张海辉等[19]研究了融合叶绿素含量的BP神经网络光合速率模型,通过加入生理因素提高模型精度。殷鉴等[20]以春秋茬温室番茄为研究对象,采用无线传感器网络获取的环境因子数据为输入,功能叶位光合速率为输出,研究构建了光合速率预测模型。胡瑾等[21]研究了番茄幼苗光合速率模型,采用遗传算法动态获取光饱和点,以此构建光合作用优化调控模型。叶子飘等[22]研究了一种针对光响应和CO2响应的新模型,发现该模型可实现丹参的光和CO2响应数据高精度拟合,且可直接获取主要光合参数。以上研究通常以作物功能叶光合能力为标准构建模型,未考虑顶叶光合机构发育不全以及不同叶位光合特性差异。因此,研究融合叶位参数的作物立体光环境调控模型,已成为设施作物高效调控的关键。
本文将以构建融合叶位的多因子耦合黄瓜花果期整株光合速率预测模型为基础,设计基于粒子群寻优算法的光饱和点寻优方法,动态计算不同叶位目标光强,从而建立以最大光合速率为目标的黄瓜立体光环境优化调控模型,以期为设施作物整株光环境按需精准调控提供理论基础。
1 材料与方法
1.1 试验材料
田间试验于2017年10—12月在陕西省咸阳市泾阳县蔬菜产业综合服务区示范基地进行,供试黄瓜品种为“博耐14-3”,育种时选取饱满籽粒进行浸泡、催芽、低温等常规处理,于540 mm×280 mm×50 mm的50孔营养钵进行育苗。育苗基质营养含量为有机质含量50%以上、腐殖酸含量20%以上、pH值为5.5~6.5。育苗期间进行统一灌溉、施肥及均匀光照处理。待黄瓜幼苗长至定植期,移植于基地东2号温室内,待黄瓜幼苗长至花果期时进行整株不同叶位净光合速率测量试验。试验期间,进行正常温室栽培管理,不施用农药及激素。
1.2 试验方法
试验主要设计不同叶位多环境因子嵌套试验,选取长势优良的黄瓜植株60株作为试验样本,采用美国LI-COR公司生产的LI-6800型便携式光合仪测定样本净光合速率。为有效避免作物“午休现象”对试验样本数据可靠性的影响,于每天09:00—11:30和14:30—17:00进行试验。从植株顶叶向下依次选取第1、3、5、7、9、11叶位叶片作为试验样本。设施内温度、CO2浓度、光照强度等环境因素日变化幅度大,经相关性分析可得(表1),其对作物光合作用影响显著,因此本文选用以上环境参数开展试验研究和模型构建。采用光合仪自带子模块按需控制被测叶片周围的温度、CO2浓度、光照强度等参数。其中,控温模块设定18、20、24、28、32、36℃共6个温度梯度;CO2注入模块设定CO2体积比为300、600、900、1 200 μmol/mol共4个浓度梯度;根据相关研究表明,黄瓜光饱和点约为990 μmol/(m2·s)左右,综合考虑设施黄瓜光饱和点以及设施内部光照强度变化范围[23-24],利用LED光源模块设定0、20、50、100、200、300、500、700、900、1 000、1 100、1 200、1 300、1 500 μmol/(m2·s)共14个光照强度梯度;湿度模块设定叶室内部相对湿度为50%。共进行2 016组试验,每组试验随机选取3株进行测量,形成容量为6 048组的试验样本数据集。

表1 各环境因子与净光合速率的相关性Tab.1 Correlation between various environment factors and net photosynthetic rate
注:** 表示在0.01水平(双侧)上显著相关。
2 模型构建
本文分3步建立设施作物立体光环境优化调控模型。首先,基于不同叶位光合数据进行光合速率预测模型构建。其次,采用粒子群寻优算法对整株不同叶位于不同环境因子组合条件下的光饱和点进行寻优。最后,基于寻优所得光饱和点构建目标光强数据集,采用回归型支持向量机(Regression support vector machine,SVR)进行立体光环境优化调控模型构建。
2.1 融合叶位的多因子耦合光合速率预测模型构建
基于试验所得光合速率样本数据,综合考虑模型精度,选取合适建模方法是保证立体光环境精准调控的关键。由于SVR算法在模型训练过程中具有训练误差小、建模精度高、泛化能力强等特点[25],本文采用SVR进行模型构建,建模流程如图1所示。

图1 回归型支持向量机建模流程图Fig.1 Flow chart of regression support vector machine modeling
首先,随机选取训练集与测试集并进行归一化处理。试验共获取样本数据2 016组,随机选取1 613组样本数据(占总样本80%)作为训练集,以此进行后续模型构建。剩余403组样本数据(占总样本20%)作为测试集,用于模型验证。由于不同样本数据之间量纲差异较大,直接进行训练可能导致网络收敛较难,故对训练集及测试集数据进行归一化操作,归一化区间为[-1,1],归一化公式为
y=2(x-xmin)/(xmax-xmin)-1
(1)
式中y——归一化后的数据
xmax、xmin——同一量纲数据序列最大值和最小值
由于径向基核函数具有计算过程参数变化而复杂度不变特性,本文选取其进行模型构建。核参数c主要影响核函数形态,影响因子g主要影响模型预测精度,经交叉验证方法进行多次经验计算获取最佳参数值c为1.024,g为0.125。
最后,模型训练及构建。针对1 613组样本,采用径向基核函数,通过将低维空间的非线性不可分问题映射到高维空间,并在高维空间产生用于最优分类的超平面,进行线性回归决策分析。决策函数为
(2)
其中K(x,xi)=exp(-σ‖xi-x‖2)
(3)
式中σ——宽度信息
f(x)——决策输出b——偏置
K(x,xi)——核函数
x——输入信号
xi——第i训练样本的输入
l——支持向量个数
2.2 基于粒子群算法的目标光照强度寻优
粒子群算法是通过模拟鸟群觅食行为而发展起来的基于群体协作的随机搜索算法,其具有可调参数少、收敛速度快、可有效避免陷入局部最优值等优势[26-28]。因此,考虑到模型复杂度以及期望精度,采用粒子群优化算法进行黄瓜整株不同叶位光饱和点数据集获取。该算法以净光合速率预测模型为适应度函数,获取不同叶位、温度、CO2浓度条件下的目标光照强度数据集,流程图如图2所示。

图2 粒子群寻优算法流程图Fig.2 Flow chart of particle swarm optimization algorithm
(1)粒子群初始化。由于寻优区间分别为步长为1的叶位的区间为[1,11],步长为1的温度区间[18,36]℃、步长为50的CO2浓度区间[300,1 200] μmol/mol,目标光照强度区间为[0,1 500] μmol/(m2·s)。在解空间中,初始化粒子群的位置为Xi=(xi1,xi2,xi3),速度为Vi=(vi1,vi2,vi3),粒子数为20,保证初始种群在解空间均匀分布。
(2)调用适应度函数。以光合速率预测模型为适应度函数,采用个体和全局最优值相结合的方法进行粒子坐标更新。找到粒子在每一代中适应度最优值,将其对应坐标作为个体最优值。找到种群在每一代中适应度最优值,将其对应坐标作为全局最优值。
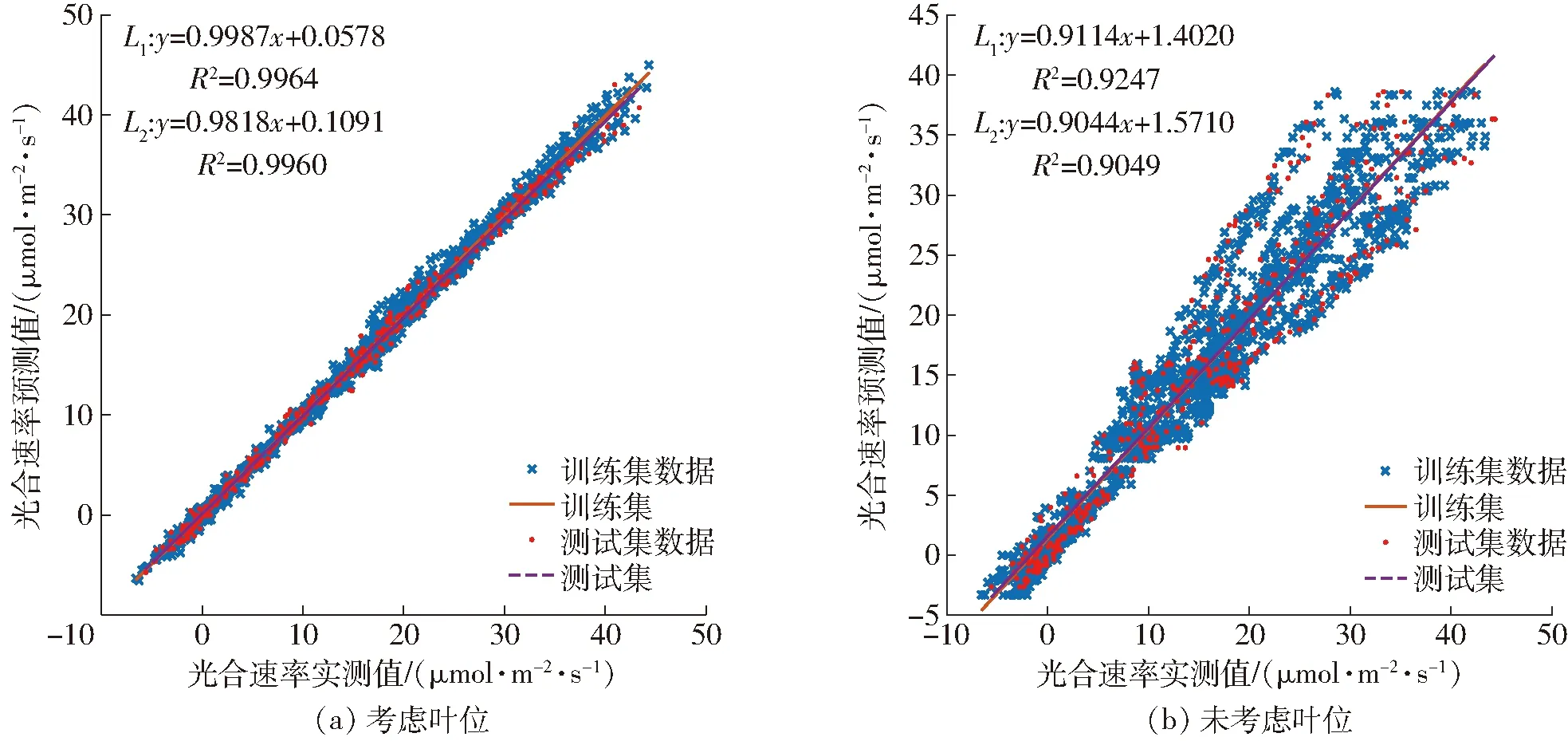
图3 不同叶位光合速率预测模型验证Fig.3 Verification of different leaf positions photosynthetic rate prediction models
(3)速度及位置更新。粒子根据个体最优值和全局最优值实时更新自身速度,更新公式为
vid=ωvid+c1r1(pid-xid)+c2r2(pgd-xgd)
(i=1,2,…,m;d=1,2,…,D)
(4)
式中vid——第i个粒子第d维的速度
ω——惯性因子d——粒子维数
c1、c2——学习因子,通常取c1=c2=2
r1、r2——[0,1]之间随机数
xid——第i个粒子第d维的位置
pid——个体最优值
pgd——全局最优值
粒子根据更新后速度调整自己位置,更新公式为
xid=xid+αvid
(i=1,2,…,m;d=1,2,…,D)
(5)
式中α——约束因子
2.3 黄瓜立体光环境优化调控模型构建
基于上述三维寻优方法,得到以叶位、温度、CO2浓度为输入,光饱和点为输出的3 971组目标光强数据集。由于SVR算法具有建模精度高、模型可移植性好的特点,可满足后期嵌入式设备运行应用等需求,故仍然选取此方法进行黄瓜立体光环境优化调控模型构建。
随机选取总样本数据的80%(即3 177组)作为训练集,进行后续模型构建。选取总样本数据的20%(即794组)作为测试集,进行后续模型验证。对训练集及测试集数据进行归一化操作,然后选取径向基核函数参与模型训练,经交叉验证方法对不同组合条件下的c、g参数进行多次计算,确定最佳参数值c为3.35,g为0.353 6,以此完成黄瓜整株光环境优化调控模型构建。
3 结果与分析
3.1 光合速率预测模型验证结果
为了验证叶位对预测模型精度影响,针对训练集采用相同建模方法,构建考虑/不考虑叶位因子的光合速率预测模型,并以异校验方式采用训练集和测试集进行两个模型对比验证,结果如图3所示。其中考虑叶位因子的训练集(L1)及测试集(L2)光合速率实测值及预测值相关性如图3a所示,结果表明其决定系数分别为0.996 4、0.996 0;均方根误差分别为0.704 9、0.745 9 μmol/(m2·s);直线斜率分别为0.998 7、0.981 8;截距分别为0.057 8、0.109 1。未考虑叶位因子的训练集(L1)及测试集(L2)光合速率实测值及预测值相关性如图3b所示,结果表明其决定系数分别为0.924 7、0.904 9;均方根误差分别为3.069 0、3.536 0 μmol/(m2·s);直线斜率分别为0.911 4、0.904 4;截距分别为1.402 0、1.571 0。可见,训练集及测试集拟合所得直线均基本重合,且考虑叶位因子所构建的光合速率预测模型具有训练误差小、拟合度更好、线性度更高的特点。
3.2 立体光环境优化调控模型结果及验证
基于目标光强数据集构建了以叶位、温度、CO2浓度为输入,光饱和点为输出的黄瓜立体光环境优化调控模型。其中,第1、3、5、7、9、11叶位不同环境因子组合条件下的光环境优化调控模型如图4所示。
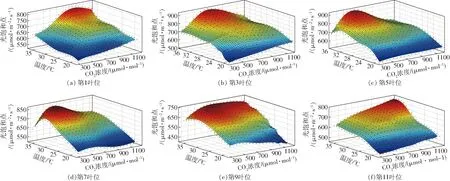
图4 黄瓜整株不同叶位需光模型Fig.4 Light model of different leaf positions of cucumber
采用测试集对黄瓜立体光环境优化调控模型进行异校验,验证结果如图5所示。分析可得其决定系数为0.999 3,均方根误差为2.349 μmol/(m2·s),直线斜率为0.998 5,截距为1.006 0,光饱和点实测值与预测值相关性较高,可实现设施作物立体光环境的高效精准调控。
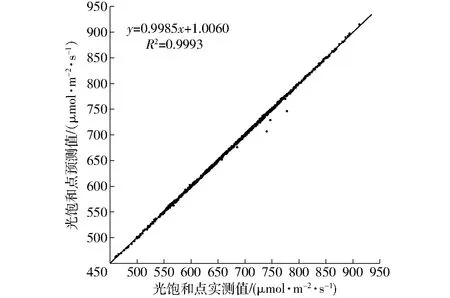
图5 立体光环境优化调控模型验证Fig.5 Verification of stereoscopic light environment optimization control model
4 讨论
由图4可发现,不同叶位光合特性存在显著差异,而光合特性与植株本身发育及衰老程度导致不同叶位主要光合器官叶绿素含量差异性、叶片表面气孔导度等因素密切联系。其中,叶绿素作为光合作用的主要参与元素,其一定程度上直接决定了光合能力[29]。因此,本文补充测量试验期黄瓜不同叶位叶绿素含量,分析其变化规律与光合特性相互关系,以期探明作物立体补光的生理依据。在前述60株试验样本中选取长势基本一致、健康无病害的黄瓜植株20株,采用SPAD-502型叶绿素仪测量黄瓜整株1、3、5、7、9、11叶位叶片顶部、中部、底部3点的叶绿素含量,计算平均值作为该叶位叶绿素值,共获得数据120组。为避免外界自然光太强对数据产生影响,试验在阴天或者遮光条件下进行。测量所得植株不同叶位叶绿素如图6所示。
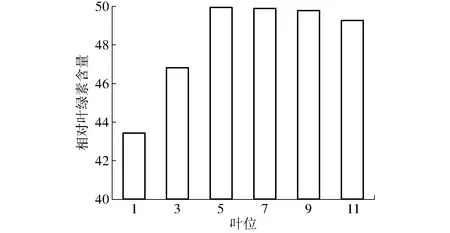
图6 不同叶位叶绿素含量分布Fig.6 Distribution of chlorophyll contentat different leaf positions
由图6可知,不同叶位叶绿素含量存在明显差异,由顶叶至老叶,叶绿素含量呈现先显著上升,再平缓,然后缓慢下降的趋势。叶绿素含量存在数值较高的局部平坦区,位于第5、7叶位区间。获取温度为18、20、24、28、32、36℃,CO2浓度为600 μmol/mol条件下不同叶位光合速率响应曲线如图7所示。
由图7分析发现,叶位1、3、5光合能力显著提升,叶位5与叶位7光合能力表现基本一致,且为整株光合最优叶位所在,叶位9与叶位11光合能力有所下降,该结果与图6所示不同叶位叶绿素含量分布结果一致,证明不同叶位叶绿素含量与光合特性具有强关联性。同时,可发现叶位9与叶位11光合能力较图6所示叶绿素含量有更大程度降低,其与叶片衰老、光合机构机能降低等因素相关。因此,在满足冠层光合需求的同时,针对适宜叶位区间的精准补光可实现作物整株光合作用最优,为设施藤蔓作物立体补光提供了良好的理论依据。

图7 不同叶位光合速率响应曲线Fig.7 Photosynthetic rate response curves of different leaf positions
5 结论
(1)以叶位、温度、CO2浓度、光照强度等多因子耦合所得净光合速率为基础,采用SVR算法构建所得光合速率预测模型决定系数为0.996 0,能以较高精度拟合多因子与光合速率之间的关系。
(2)提出了基于粒子群寻优算法的目标光照强度寻优方法,可得不同叶位最大光合速率及最优目标光照强度,融合SVR算法构建以光饱和点为目标值的黄瓜花果期立体光环境优化调控模型。验证结果表明,其决定系数为0.999 3,拟合所得直线斜率为0.998 5,纵坐标截距为1.006 0,均方根误差为2.349 μmol/(m2·s),可满足立体光环境按需调控的要求,为设施作物优产优质奠定了良好基础。
(3)基于叶绿素的验证试验表明,不同叶位叶绿素含量与光合特性具有强关联性,为设施藤蔓类作物立体光环境调控提供一定理论支撑。