多场耦合多方向振动俘能器建模及响应分析*
2019-02-27张旭辉吴中华赖正鹏谭厚志樊红卫
张旭辉, 吴中华, 赖正鹏, 谭厚志, 樊红卫
(西安科技大学机械工程学院 西安, 710054)
引 言
压电式振动俘能器的设计需要充分利用系统固有频率与环境振动频率的相互匹配以达到性能最优。大多数环境激励表现出随机性[1]、宽频带及非周期性等特点,且伴有噪声[2],使窄带线性谐振系统收集方式在实际工程中俘能效果不理想[3]。多场耦合振动俘能器利用力-电-磁多物理场耦合来收集环境振动能量,具有较宽的响应频带和广泛的适应能力。近年来基于多场耦合机理构建高效振动俘能器成为国内外的研究热点[4]。
振动俘能器的性能研究一般是通过建立系统的机电耦合模型来确定系统能量转换关系。常用的建模方法包括集中参数法和分布式参数法[5]。文献[6]建立了双稳态振动俘能器等效集中参数模型,得到了能量采集效率与外界激励的变化关系。陈定方等[7]建立了振动俘能器分布式参数模型,分析了简谐激励下压电能量收集器动力学方程,获得了结构末端质量块质量、结构尺寸对输出能量的影响规律。Erturk[8]建立了对称和非对称压电层合板悬臂式压电俘能器的分布式参数模型,得到了简谐激励下稳态响应结果。集中参数法建模虽能便捷地建立整体模型转换关系,但局限于单一振动模式,缺少耦合系统某些细节因素的影响关系,会造成系统动态响应误差偏大。分布式参数法建模能有效得到系统具体结构参数的影响关系,为振动俘能器参数优化提供理论依据。
笔者建立了非线性磁振子模型,通过Taylor级数展开处理磁力非线性项,导出磁铁间距与磁力间的相互变化规律。在此基础上,利用广义Hamilton原理建立系统分布式机电耦合模型,得到系统横向自由振动和纵向自由振动下的非线性动力学方程,通过对动力学方程数值求解,得到不同初始条件下系统的响应特性和输出性能,为低频、低幅振动能量收集装置的设计及开发提供理论依据。
1 俘能器非线性动力学建模
笔者研究的多场耦合多方向振动俘能器由4个线形-拱形组合梁、永磁铁质量块和可调磁铁组成,如图1所示。线形-拱形组合梁以金属梁为基层,其表面贴有压电换能元件,4个组合梁拱形端分别连接永磁铁质量块四个面,线形端固定在外壳上。外壳上下表面通过调节螺纹可调整磁铁间距。其中:u为系统纵向激励方向;w为系统横向激励方向。

图1 多场耦合多方向压电俘能器振动模型Fig.1 3D model and prototype of multi-field coupled multi-direction piezoelectric energy harvester
1.1 分布式参数模型建立
利用广义Hamilton变分原理[9]建立多场耦合多方向振动俘能器分布式参数模型
(1)
其中:δT*为系统动能的变分;δW*为系统势能的变分;δWnc为系统外力虚功的变分;δUm为系统磁力势能的变分。
由于横、纵向磁力模型不同,且为系统主要非线性项,故下节单独进行建模分析。俘能器结构为4个相同的线形-拱形组合悬臂梁固定在中心质量块上,假设系统永磁铁质量块不发生横向偏移,此时系统相当于一个不发生横向偏移的线形-拱形组合悬臂梁纵向振动,如图2所示。

图2 线形-拱形组合悬臂梁示意图Fig.2 Schematic diagram of linear arched composite cantilever beam
系统动能T*为
(2)
系统势能W*为
(3)
系统外力虚功Wnc为
(4)

1.2 系统振动磁力模型建立
大多数非线性振动俘能器建模中磁力模型均引入一个三次非线性项作为系统磁力输入[10],但是在系统振动过程中,永磁铁之间作用面积及相对角度均会发生较大变化,而磁铁之间的磁力是系统的主要非线性项,因此建立非线性磁力模型是建立精确的整体系统模型必不可少的内容[11]。选用两个圆柱体磁铁相互作用,如图3所示,可等效为一个非线性弹簧,磁铁吸引力可看做是拉伸弹簧,排斥力则为压缩弹簧。

图3 磁铁磁力等效模型Fig.3 Magnetic equivalent model of magnet
磁铁之间相互作用力Fmd[12]可表示为
(5)
其中:Br为磁铁磁通密度;Am为磁铁相对作用面积;l为磁铁长度;Rm为磁铁半径;d为磁铁间距;μ0为真空磁导率。
如图4所示,使用圆柱形磁铁分别粘贴在中心质量块以及外壳上下内壁,为增大系统输出及对低频小幅值振动响应效率,磁铁间的相互作用选为吸力作用。为简化磁力计算过程,假设横向振动时磁铁不会偏转,且上下相对距离不发生改变,uL,t为纵向振动中心磁铁位移,wL,t为横向振动中心磁铁位移。

图4 非线性磁力模型Fig.4 Nonlinear magnetic model
纵向振动磁力Fmd为
(6)
磁力势能变分可表示为
(7)
(8)

δwL,t
(9)
1.3 动力学方程的建立
由材料力学[13]可知,组合悬臂梁应力T1为
(10)

根据压电材料能量转换方式可知,选择第2类边界条件(机械夹紧、电学短路),取应变S1和电场强度E3为自变量,应力T1和电位移D3为因变量,则系统压电方程为
(11)
(12)

通过Rayleigh-Ritz法将梁的振动相对位移uX,t离散化后[14],由于俘能器结构为组合悬臂梁结构,其长度与厚度之比较大,可近似为欧拉伯努利梁,实际振动过程中,振动形式主要表现为一阶振型。故仅考虑组合梁的一阶模态变形,根据压电元件恒定电场假设及Euler-Bernoulli梁理论可得
uX,t=ψ1rXrt
(13)
(14)
(15)
其中:ψ1vY为纵向振动电势分布函数;vt为广义电压模态函数;ψ1rX为组合悬臂梁纵向振动第1阶模态振型函数;rt为广义模态坐标。
将式(10)~(15)代入式(2)~(4)可得

(16)

(17)

(18)
将式(13)代入式(7),在r=0处泰勒展开有
K1r+K2r3+or5δr
(19)
其中
(20)
(21)
设系统基础激励为yt=y0sinω0t,将式(16)~(19)代入式(1),可得动力学方程
(22)
θr+Cpv+q=0
(23)
其中
(24)
(25)
(26)
(27)
(28)
将式(24)代入式(22)和式(23),可得
ϑu=-ρsinΩt
(29)

(30)

同理可得横向振动动力学方程为
(31)
θ′r+Cp′v+q' = 0
(32)

2 多场耦合振动俘能器动态响应数值求解
2.1 一阶模态振型函数求解
由式(24)~(28)可知,动力学方程(29),(30)中参数均为ψ1rX的函数,故数值分析前须进行一阶模态振型函数求解。可将图1中线形-拱形组合悬臂梁分为线性直梁(AB段)和拱形曲梁(BC段)两部分,两者分断面(B面)通过约束条件连接,故线性直梁(AB段)一阶模态振型函数Yx[15]为
ψr1x=Yx=C1sinβx+C2cosβx+
C3sinhβx+C4coshβx
(33)
拱形曲梁(BC段)一阶模态振型函数Yθ为
(34)

联立式(33)和(34),其中参数C1,C2,C3,C4,C5,C6,C7,C8由式(35)~(37)边界条件确定。
固定端边界条件为
(35)
分断面边界条件为
(36)
自由端边界条件为
(37)
2.2 动力学响应计算
数值仿真中结构参数均使用实验装置实际尺寸参数,如表1所示。采用四五阶龙格库塔算法对无量纲动力学方程(29)和(30)进行数值模拟,得到系统有磁力和无磁力作用时,磁铁间距d和激励幅值ρ对系统横、纵向输出性能的影响结果。
表1多场耦合多方向振动俘能器结构参数
Tab.1Structureparametersofmulti-fieldcoupledmulti-directionpiezoelectricenergyharvester

类型参数类型参数线形-拱形组合梁铍青铜质量块铸铁磁铁钕铁硼压电材料PVDF线形梁长度/mm15线形PVDF长度/mm10半圆拱形梁半径/mm10拱形PVDF半径/mm10.2半圆拱形梁弦长/mm20拱形PVDF弦长/mm10组合梁宽度/mm8PVDF宽度/mm6组合梁厚度/mm0.2PVDF厚度/mm0.2组合梁密度/(kg·m-3)8 800压电应变常数/(10-12C·N-1)23组合梁弹性模量/Pa1.33×1011圆柱磁铁尺寸/(mm*mm)12×2组合梁惯性矩/mm45.33×10-3剩余磁通密度/T1.25质量块尺寸/(mm*mm*mm)15×15×15真空磁导率/(H·m-1)4π ×10-7
将仿真参数代入求解模型,可得ζ=0.1,ϑ=0.12,ϖ=0.051,选取激励参数ρ=1,Ω=0.8,图5为磁铁不同距离时纵向振动系统的响应。对比系统无磁力、磁间距d分别为20 mm和15 mm时的响应情况可以看出,随着磁吸力的加入和磁间距的缩小,系统振动响应加速度增大,输出电压增大。当d=15 mm时,系统响应加速度近似为无磁力作用的4倍,输出电压近似为无磁力作用的5倍。当磁间距为15 mm时,系统响应最大振幅达到13 mm。由于系统利用磁吸力作为磁铁相互作用力,此时继续减小间距会使得响应位移幅值大于间距值,系统无法正常工作。

图5 磁铁不同距离时纵向振动系统的响应Fig.5 Response at difference distance of the horizontal magnet system

图6 不同激励幅值时纵向振动的系统响应加速度Fig.6 Acceleration response of the vertical system at different excitation amplitude
图6为不同激励下纵向振动过程中系统响应加速度。可以看出,当激励振幅增大时,系统响应加速度、输出电压增大,当激励幅值a=1 m/s2时,系统响应输出很小,能量转换效率很低,此时加入磁吸力作用可增大系统响应电压输出,约为无磁力输入时电压输出的5倍,提高系统对低幅振动时的能量转换效率。
图7为不同磁铁间距横向振动过程中系统的响应。可以看出,系统在无磁力、d=20 mm和d=15 mm吸力作用时,由于磁吸力的加入,系统横向振动响应加速度会随着磁吸力的作用减小。由于系统横向刚度大于纵向刚度,所以系统横向振动响应随着磁吸力的作用,减小的输出量远小于纵向振动增加的输出电压。
图8为不同激励下横向振动过程中系统的响应加速度。可以看出,当激励振幅增大时,系统响应加速度、输出电压增大。由于磁吸力在振动过程中会抑制横向振动振幅,所以有磁力作用时增幅比例相对无磁力作用时要小。

图8 不同激励幅值时横向振动系统的响应加速度Fig.8 Acceleration response of the horizontal system at different excitation amplitude
3 实 验
3.1 实验平台搭建
为验证上述理论分析结果,建立了多场耦合多方向振动俘能器性能测试平台,如图9所示,由上位机、振动控制器、功率放大器、激振台、监测传感器、待测压电俘能器以及功率分析仪组成。测试系统通过粘贴在质量块上的监测传感器来获得装置输出响应,通过功率分析仪获得装置输出电压。由于监测传感器安装固定于质量块上端,系统加入磁吸力则采用下方单侧加入。待测压电俘能器详细参数如表1所示。
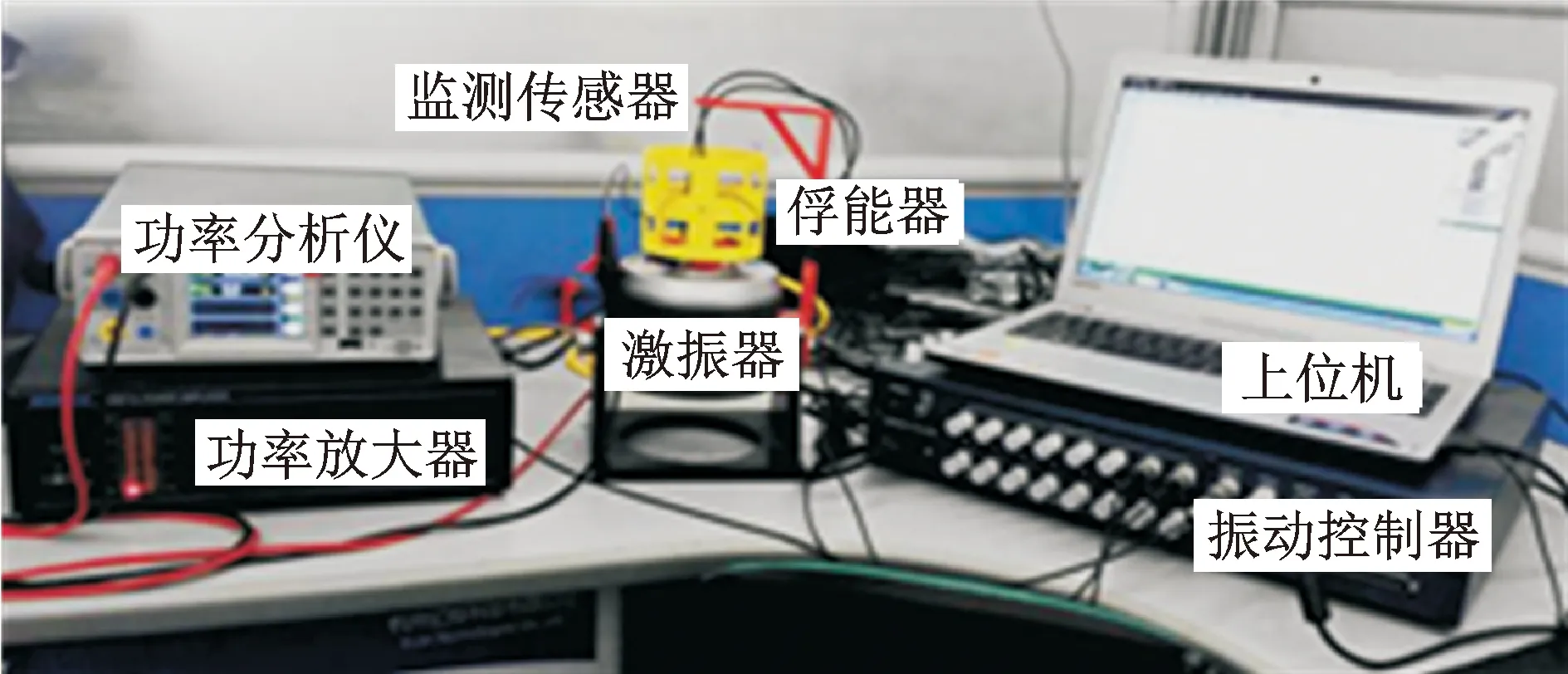
图9 多场耦合多方向振动俘能器性能测试平台Fig.9 Multi-field coupled multi-direction piezoelectric energy harvester performance test platform
本实验通过改变磁铁距离,测试不同激励频率和激励幅值条件下振动俘能器的响应加速度和响应电压,以及系统响应频谱特性及输出。与理论模型的仿真解对比,从而验证模型的正确性。最后,对系统在低频、低幅激励下的收集能力给出评定。

图10 不同磁间距时系统响应频谱特性和输出电压Fig.10 System response spectrum and output voltage at different magnetic spacing
3.2 实验结果
选取纵向振动激励幅值为2 m/s2,测得多场耦合多方向振动俘能器的响应频谱特性和输出电压如图10所示。系统在加入磁吸力作用时,不仅增大了系统谐振时的响应输出,而且随着磁力间距的减小,系统磁力作用增大,谐振频率降低。
选取纵向振动激励幅值为2 m/s2,系统谐振输出时,测得不同磁铁间距的振动俘能器响应加速度和输出电压如图11所示。由于实验磁吸力为单侧输入,所以响应加速度和输出电压为上下非对称。可以看出,系统做周期运动,加入磁吸力作用时,系统响应加速度增大、频率减小;磁铁距离为15 mm时,输出电压峰值达到1V左右,近似为无磁力作用电压输出的5倍。

图11 不同磁铁间距时系统响应加速度和输出电压Fig.11 System response acceleration and output voltage at different magnet spacing
选取系统磁铁间距为15 mm,纵向振动时,测得不同激励幅值下振动俘能器的响应频谱特性和输出电压如图12所示。在磁吸力作用下,系统响应输出随着激励幅值增加而增大,响应频带变宽。

图12 不同激励幅值时系统响应频谱特性和输出电压Fig.12 System response to the spectral characteristics and output voltage at different excitation amplitudes
选取系统磁铁间距为15 mm,纵向振动系统谐振输出时,测得不同激励幅值下振动俘能器的响应加速度和输出电压如图13所示。随着激励幅值的增大,系统响应加速度增大、输出电压增大;激励幅值为2 m/s2时,输出电压峰值达到1V左右,约为激励幅值为1 m/s2时输出电压的3倍。

图13 不同激励幅值时系统响应加速度和输出电压Fig.13 System response acceleration and output voltage at different excitation amplitude
为测试压电俘能器在小激励幅值下的系统响应,选取纵向振动激励幅值为0.5 m/s2,系统谐振输出时,测得不同磁铁间距的振动俘能器响应加速度和输出电压如图14所示。可以看出,系统由于磁力输入较小,使得小幅值振动下响应输出低,由于理论分析中磁间距小于15 mm,系统无法正常工作。故系统应通过增加磁力输入来增大响应输出。

图14 激励幅值0.5 m/s2系统响应加速度和输出电压Fig.14 System response of acceleration and output voltage when the excitation amplitude is 0.5 m/s2
将俘能器永磁铁厚度增加至两倍,选取纵向振动磁铁间距15 mm、激励幅值0.5 m/s2时,测得不同磁力输入下振动俘能器响应频谱特性和输出电压如图15所示。可以看出,当增加磁力输入后,系统响应输出增大,谐振频率减小,响应频带变宽。

图15 不同激励幅值时系统响应频谱特性和输出电压Fig.15 System spectral response characteristics and output voltage at different excitation amplitudes

图16 激励幅值0.5 m/s2系统响应加速度和输出电压Fig.16 System response of acceleration and output voltage when the excitation amplitude is 0.5 m/s2
选取纵向振动激励幅值为0.5 m/s2,系统谐振输出时测得不同磁力输入的振动俘能器响应加速度和输出电压如图16所示。可以看出,无磁力和单个磁力输入时,系统在激励幅值为0.5 m/s2时,响应输出很小;增加至双磁力输入(近似两倍磁力)时,系统输出增大,响应频率降低,响应加速度近似为无磁力输入的6倍,此时系统输出电压峰值达到1.2V,为无磁力输入的6倍,提高了能量转换效率。
3.3 实验误差分析
对比发现,多场耦合多方向振动俘能器响应输出实验结果与理论结果存在误差,但整体趋势正确。通过分析,误差来源于:a.小正振动俘能器为线形-拱形组合梁结构,在加工过程中无法保证拱形部分曲率一致性,导致模型刚度与实际刚度存在误差,使系统输出存在偏差;b.实验过程中,由于振动俘能器性能测试使用接触式测量,虽然传感器质量小,但传感器信号线在振动过程中对俘能器有一定影响,后续研究中考虑非接触测量。
4 结 论
1) 在振动俘能结构中引入线形-拱形组合梁和非线性磁吸力,提高了俘能器的响应频带和能量转换效率,解决了俘能器在低频、低幅值环境激励的响应输出性能低等问题。
2) 提出了一种复杂结构悬臂梁建模方法,利用广义Hamilton变分原理建立了多场耦合多方向振动俘能器的非线性动力学模型,通过数值求解得到系统在不同初始条件下的响应输出特性。
3) 搭建了振动俘能器性能测试平台,开展了多场耦合振动俘能器频谱特性及响应输出的分析实验。当磁铁间距减小或激励幅值增大时,系统响应输出增大,加入磁吸力不仅增加了系统输出,而且降低了系统谐振频率,拓宽了响应频带。当磁铁间距为15mm、激励幅值为0.5m/s2时,相比无磁力输入情况,系统响应电压提高了6倍左右,谐振频率从18 Hz降至9.5 Hz左右,解决了振动俘能器频带窄、响应频率高和输出电压低等问题。