自动驾驶汽车下电动助力转向发展研究
2019-02-26胡伟林成杰吴虎强
胡伟,林成杰,吴虎强
(广州汽车集团股份有限公司汽车工程研究院,广东广州 511434)
0 引言
随着现代通信与网络技术、人工智能、传感检测及车载控制执行等核心技术的突破和完善,自动驾驶汽车也越来越被公众所关注与熟知。自动驾驶汽车作为未来汽车的发展方向,将对道路交通带来颠覆性的变革。它通过解放司机来提供更舒适的出行,同时增加道路安全来帮助降低道路事故死亡率,更能提供差异化的服务满足客户个性化的需求。
自动驾驶通过车辆上各类电子电器产品来完全模仿人的驾驶行为控制车辆,如何保证车辆平稳运行、加减速和转向、应对紧急状态并保持自身功能不失效成为重大的技术挑战。ISO 26262标准[1]的制定旨在提高汽车电子电器产品的功能安全,通过容错性设计要求,有效支持自动驾驶车辆的功能安全。按照ISO 26262标准要求,电动助力转向系统如何实现自动驾驶的转向执行功能并不失效,成为目前转向行业面临的重要课题。
1 电动助力转向基本概况
1.1 自动驾驶的分级及发展趋势
自动驾驶按照SAE J3016标准[2]共划分为5个等级(见表1),等级0为完全驾驶员控制,等级1与等级2区别在于是否同时执行转向和加减速操作,等级2与等级3区别在于是否需要实时监视,等级3与等级4区别在于出现紧急情况,是否需要驾驶员介入,等级4与等级5区别在于是否全工况自动驾驶。目前应用比较普遍的主动巡航系统(Adaptive Cruise Control,ACC)、 自动紧急制动系统(Autonomous Emergency Brake,AEB)、车道偏离预警(Lane Departure Warning,LDW)均属于等级1的自动驾驶,车道偏离辅助(Lane Keeping Assistance,LKA)属于等级2的自动驾驶,交通拥堵辅助(Traffic Jam Assist,TJA)属于等级3的自动驾驶,暂时还没有等级4、等级5的配置应用。
根据主要汽车制造企业及互联网企业的计划或愿景,如表2所示,2020年是自动驾驶汽车实用化的一个关键时间节点[3]。并且随着奥迪 A8在2017年首次推出自动驾驶等级3的量产车型[4],各国的主要车企及产业在相关技术研发、法规制定以及市场趋势引领的竞争将处于白热化的阶段。

表1 自动驾驶等级
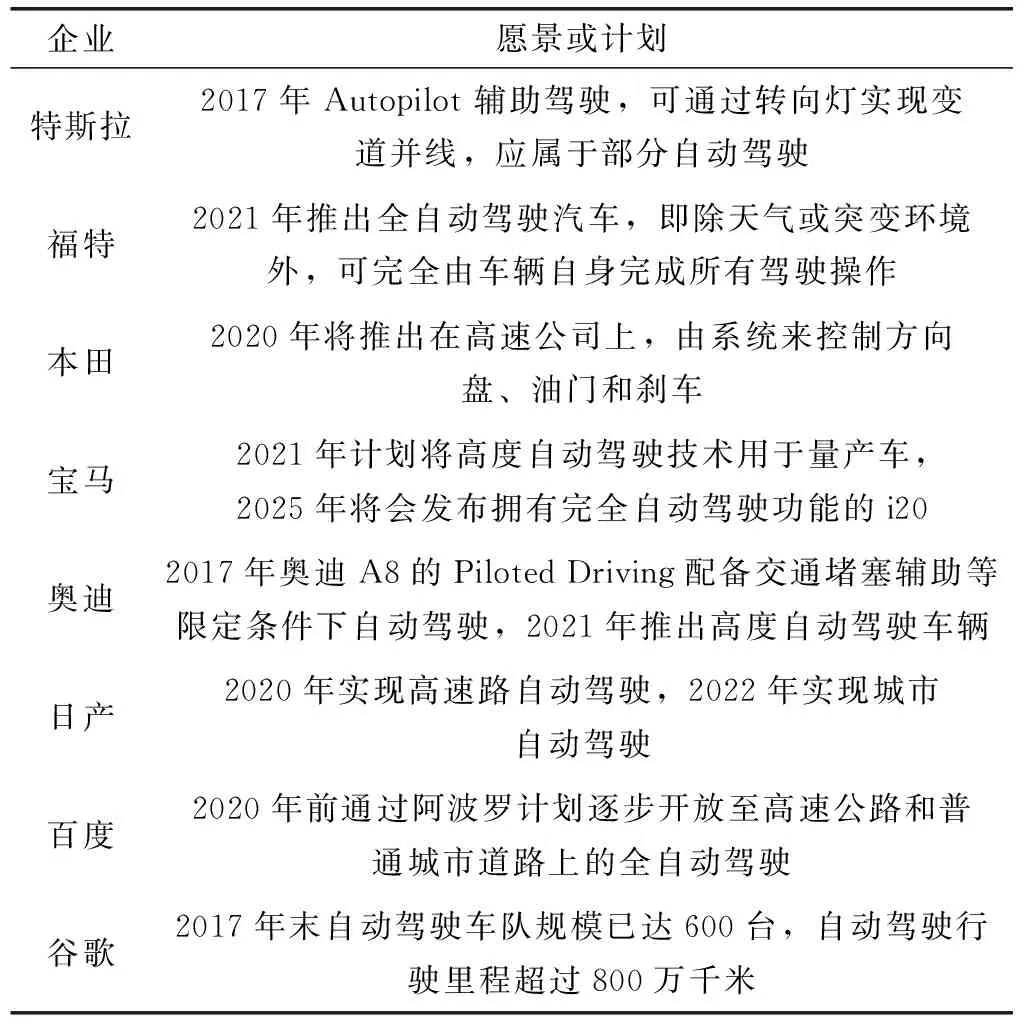
表2 自动驾驶愿景
1.2 电动助力转向
电动助力转向(Electric Power Steering,EPS)在车辆上功能之一为驾驶员转向方向盘时提供所需要的转向助力,另一个功能是作为执行装置为整车高级功能(如自动泊车、车道偏离辅助等)提供转向执行操作。自动驾驶中的等级1到等级5都需要车辆辅助系统实现转向操作,自动驾驶的实现离不开EPS的支持。
转向系统是车辆安全的重要组成部分,无论是提供转向助力,还是实现转向执行动作时,任何程度的转向失效都会给驾驶员带来安全风险而引起抱怨和处罚。如何保证EPS的稳定性和可靠性来减少转向失效,成为实现自动驾驶的关键要素。
1.3 功能安全标准
ISO 26262标准主要应用于汽车行业中特定的电子电气设备和可编程电子器件,标准的制定旨在提高道路车辆电子电器系统的功能安全。ISO 26262定义了汽车安全生命周期和汽车安全完整性等级(Automotive Safety Integration Level,ASIL)两个关键概念,ASIL等级由严重度(S)、暴露率(E)、可控性(C)这3个指标共同决定。表3分别定义3个指标等级划分,ASIL根据S、E、C指标划为如图1所示的5个等级。

表3 ASIL构成指标等级

图1 ASIL等级定义
EPS的安全等级按上述原则可以确认为最高安全等级ASIL-D,其中EPS失效对驾驶员或行人造成伤害的严重度为S3,车辆保持高速直线行驶概率极高的暴露率为E4,EPS失效影响车辆高速直线行驶控制的可控性为C3。开发满足ISO 26262功能安全的系统来提升自动驾驶安全性,成为当前EPS开发的趋势。
2 EPS的功能安全设计
2.1 EPS功能框图
EPS系统是复杂机电一体化系统,其机械部分、减速器、助力电机、传感器以及控制系统的软硬件均对 EPS 及其整车转向性能有重要的影响。结合英飞凌的芯片组[5]解决方案概述EPS功能框图,EPS功能系统(见图2)主要由供电系统、扭矩传感器、CAN总线、MCU主芯片、电机驱动、电机位置传感器、电机等构成。
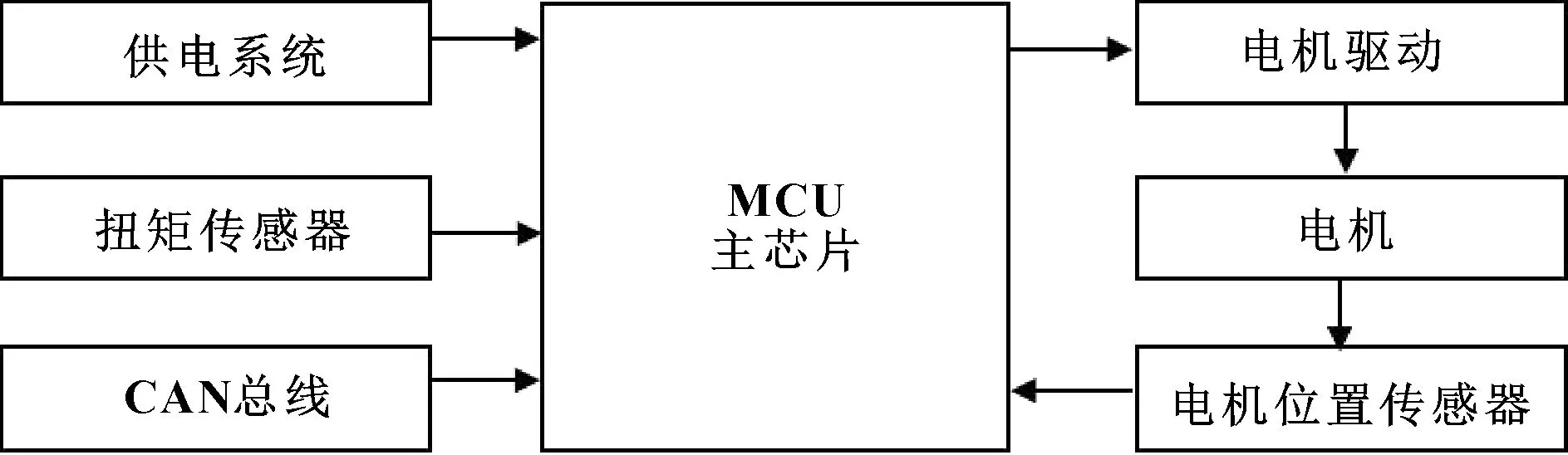
图2 EPS功能框图
2.2 EPS的容错等级
按照ISO 26262标准要求得出EPS的ASIL等级,并确定EPS的安全目标来防止转向失效,转向失效最主要的功能故障为转向助力丢失。针对转向助力丢失,目前主要采用故障容错机制来减少助力完全丢失故障可能性,保证部分或完全助力来提升EPS容错性以实现车辆转向功能。
结合EPS的功能定义和自动驾驶的工作需求,对EPS容错等级、 ASIL等级、自动驾驶等级、目前常见功能、EPS功能设计等做如表4所示的关联定义。

表4 EPS容错等级
2.3 EPS容错设计及故障模式定义
EPS通过容错设计来满足ISO 26262标准要求,以支持自动驾驶。大量功能件的冗余设计必将带来EPS系统设计、验证和成本的大量投入,针对EPS容错设计,按照自动驾驶的总体趋势和ISO 26262合规性要求,针对不同容错等级的技术方案提出如表5所示的设计规划。目前市场上的EPS处于从容错等级1向容错等级2或者容错等级3过渡阶段,JTEKT在其管柱式电动转向系统中已量产达到容错等级2的产品[6]。

表5 容错等级设计规划
转向助力丢失的故障模式一般可分为助力完全丢失、助力逐步丢失、提供部分助力、助力不受影响等,容错等级3对扭矩传感器、电机位置传感器、电机驱动、电机等进行冗余设计的功能框图如图3所示。容错等级3的产品应对失效时的故障模式分为突然丢失助力、提供部分助力、助力不受影响3类(见表6)。

图3 容错等级3功能框图

功能系统设计应对故障应对供电系统/突然丢失助力扭矩传感器冗余容错性设计,无影响CAN总线/软件冗余,提供部分助力主芯片/突然丢失助力电机驱动冗余容错性设计,提供部分助力电机冗余容错性设计,提供部分助力电机位置传感器冗余容错性设计,无影响
因供电系统、主芯片无冗余设计,发生故障时EPS会直接失去助力,CAN总线信号丢失或故障时,可通过软件冗余,系统提供部分助力。电机冗余目前主要采用双绕组设计来实现,并与电机驱动相对应,出现电机驱动或电机故障时,系统仍可提供一半助力,扭矩传感器和电机位置传感器因采用冗余设计,对助力无影响。
3 结论
(1)文中提出电动助力转向功能安全开发构想来满足ISO 26262标准和支持自动驾驶要求;
(2)通过对电动助力转向的容错等级定义,提出不同容错等级的功能设计规划及故障应对措施;
(3)后续会结合自动驾驶发展趋势,研究具体的电动助力转向设计方案和应用。
