基于积分鲁棒的电液伺服系统渐进控制
2019-02-25杨洋
杨 洋
(南京航空航天大学,南京 210016)
0 引 言
针对电液控制系统中具有未知的动力学和有界扰动,许多方法相继被提出[1],其中自适应控制方法是一种有效的方法[2]。但是传统自适应控制的响应可能由于控制器高增益而失稳,不利于保证系统的安全[3]。文献[4]提出了一种新的鲁棒自适应控制,这种控制可保证系统收敛于稳态,同时也可以调节系统瞬态响应。文献[5]采用光滑摩擦模型来适应未知的非线性,同时针对近似误差和其它有界扰动,利用误差项符号的积分鲁棒方法来补偿。通过实验研究验证所提出的控制方法的有效性和改进的控制性能[6]。
针对上述问题,本文采用光滑摩擦模型来适应未知的摩擦非线性,利用误差项符号的积分鲁棒方法来补偿近似误差和有界扰动,最后进行了仿真对比,仿真结果表明,积分鲁棒控制方法的输出性能得到有效改进。
1 问题提出
本文所考虑运动位置伺服系统如图1所示,其中Ps为油源压力,Pr为理想气体压力。
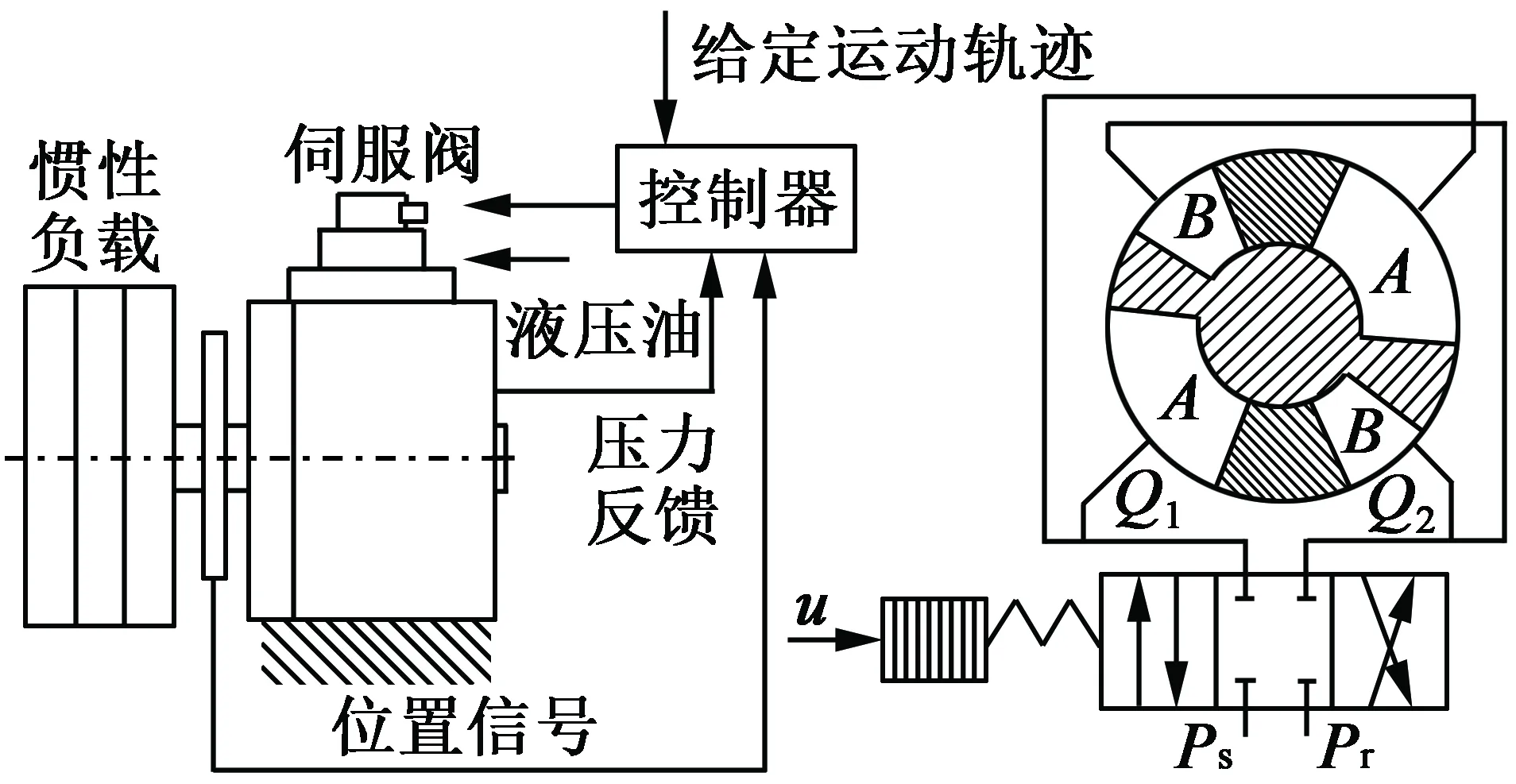
图1 电液位置伺服系统示意图
惯性负载的运动方程:
(1)
式中:J和θm分别为系统转动惯量和输出转角;PL为负载压力;Dm为电动机排量;fm为运动系统的摩擦;f(t)为不确定干扰。PL的动态方程可以表示[6]:
(2)
式中:Vt为控制容积;βe为有效弹性模量;Ct为泄漏系数。QL可表示如下[5]:
(3)
式中:kt为流量系数;sign(u)定义如下:
(4)
(5)

(6)
基于双曲正切函数来近似适应摩擦模型可描述:
fm=θ1[tanh(c1x2)-tanh(c2x2)]+
θ2tanh(c3x2)+θ3x2
(7)
此静态模型是关于速度的特性曲线,如图2所示。取参数θ1=150,θ2=30,θ3=0,c1=200,c2=160,c3=200。
定义参数θ=[θ1,θ2,θ3]T,其相应的回归器φ=[tanh(c1x2)-tanh(c2x2), tanh(c3x2),x2]T,则式(7)可参数线性化:
fm=φT(x2)θ
(8)
结合静态摩擦模型式(7),则式(5)可化:
(9)
式中:θo是对常值参数θ的辨识估计。
为便于控制器设计,做如下假设:
假设 1 此时的系统为不确定性有界,即:
(10)
式中:ξN2,ξN3为已知界。
2 误差符号积分鲁棒控制器设计
定义如下的误差变量:
(11)
式中:k1,k2,k3均为正的反馈增益;e1为跟踪误差。
将式(9)代入式(11)可得:
(12)
将式(12)代入式(11)可得:
(13)
由式(13),我们可设计鲁棒控制器如下:
(14)
式中:kr>0为控制器增益;β>0为鲁棒增益。
将式(14)代入式(13)可得:

(15)
对式(15)两边求微分可得:
(16)
3 稳定性证明
为了方便地分析鲁棒控制器式(14)的潜在性能,引入如下的引理。
引理 1
定义:
L(t)=r[N-βsign(e3)]
(17)

(18)
若β满足:
(19)
则辅助函数P(t)恒为正值。
证明:由式(17),对其两边同时取积分,可得:
因此有:
由式(19)及式(21)知:

(22)
由引理1可知:
(23)
基于引理1,我们有如下的性能定理。
定理 1 对于非线性系统式(9),若β满足式(19),且如下矩阵Λ:
(24)
为正定矩阵时,则t→∞时,e→0,其中e定义为e=[e1,e2,e3,r]T,并且可由误差符号积分控制器鲁棒项μ辨识系统的真实摩擦力,即:
(25)
证明:定义如下函数:
(26)
由式(12)及式(16)知:
又由式(24)定义的矩阵Λ正定知:
(28)

(29)
由定理1可知,只要鲁棒增益β值取得足够大,我们就可以获得较好的摩擦补偿效果。
4 仿真对比
文献[5]中电液系统具体参数如表1所示。
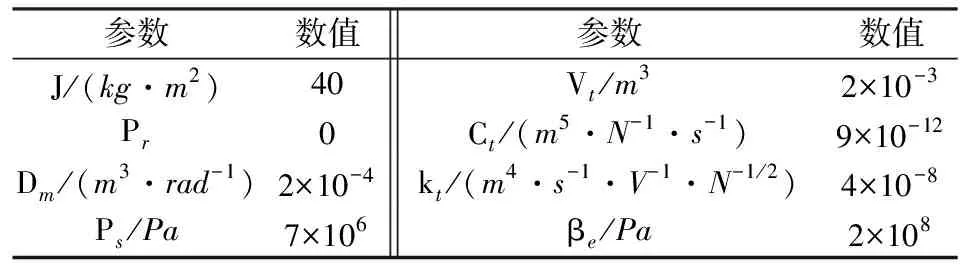
表1 电液系统参数
系统跟踪信号x1d(t)=0.2sin(πt)[1-exp(-0.01t3)]。为了便于对比,本文采用积分鲁棒控制器(以下简称ARIPC)方法、误差符号积分控制器(以下简称RISE)方法以及反馈线性化控制器(以下简称FLC)进行仿真对比。三种控制器的参数选取如下:
1)误差符号积分鲁棒控制器(ARIPC):取控制器参数k1=250,k2=20,kr=2,β=2,自适应增益Г=diag{100, 50, 50, 50}。
2)误差符号积分控制器(RISE):即所设计的RISE控制器中不含模型补偿部分。为保证对比公平性,其控制器参数与ARIPC控制器中对应的参数相同。
3) 反馈线性化控制器(FLC):参照文献[5]设计控制器如下:
式中:k1=5×104,k2=2×103,k3=200,χ=1。
图3是系统在ARIPC控制输入信号。ARIPC下系统对期望指令的跟踪曲线、三种控制器作用下的跟踪误差分别如图4,图5所示。由图5可知,ARIPC控制器的暂态和稳态跟踪性能都要优于相对比的RISE控制器和FLC控制器,RISE控制器由于缺少模型补偿,获得较差的跟踪性能,而FLC控制器既没有自适应模型补偿,也没有非线性鲁棒反馈则作用,获得最差的跟踪性能。

图3 ARIPC控制输入信号

图4 ARIPC下系统实际输出曲线
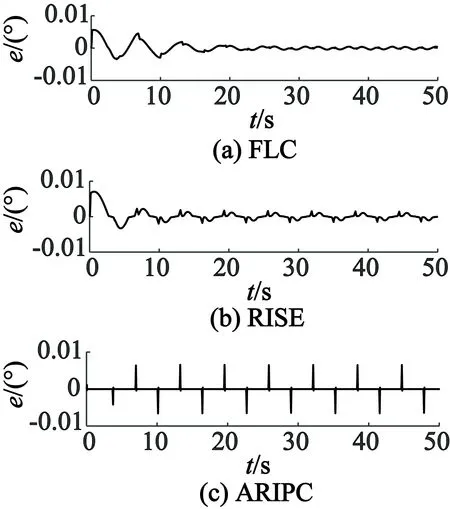
图5 系统跟踪误差曲线
5 结 语
本文针对电液位置伺服系统,采用光滑摩擦模型来适应未知的摩擦非线性,利用误差项符号的积分鲁棒方法来补偿近似误差和有界扰动。仿真结果表明,对比FLC和非线性RISE补偿控制器,基于ARIPC的补偿策略具有改进的输出性能。