基于元胞自动机的无信号人行横道处人车干扰机理研究
2019-02-23程建辉李得伟
程建辉,李得伟
(北京交通大学交通运输学院,北京 100044)
在城市交通中存在着大量的机动车和行人的混合交通流,尤其是在路段无信号人行横道处,行人和机动车之间发生干扰冲突,不仅会造成交通拥堵,降低道路通行效率,而且可能发生交通事故。根据美国国家公路交通安全管理局的统计,71%的行人死亡事故发生在市区的人行横道处[1]。因此,分析行人与车辆之间的相互作用一直是道路设计、交通信号控制和道路使用者行为研究的热点[2-6]。
当前对无信号人行横道处行人和机动车干扰的研究主要有行人的过街决策和机动车的选择避让两个方面。在行人过街决策方面,Shi等[7]以北京某处人行横道为例,对无信号控制人行横道处行人的行为和交通特性进行了研究,对行人的性别、过街目的和是否结伴对速度的影响,行人的时间间隙与等待时间的关系进行了分析。而临界时间间隙是行人过街决策模型的关键参数, 其中Hanan等[8]将临界时间间隙定义为次要街道行人准备越过或进入主要道路区域的最小时间间隔。Yannis等[9]调查了城区街道过街的行人临界时间间隙,发现临界时间间隙与行人和车辆的距离、是否结伴以及机动车的大小有关。Li等[10]针对行人和机动车之间的干扰,将行人的临界时间间隙分为行人过街步行时间和考虑行人安全的时间两部分,机动车通过改变加速度来保证冲突区域的安全运行。Kadali等[11]观察了印度大都市区的几个道路交汇处,提出离散选择理论可用于建立一个数学模型,以减少行人的事故。Chen等[12]提出了决策模型和运动模型,将累计前景理论运用到行人过街决策过程,并发现了行人过街决策中的不一致现象。
在机动车避让方面,Tomas等[13]评估了机动车速度对人行横道的司机避让率的影响,发现车速和避让率之间有很强的相关性,车速较高的机动车对行人不太可能避让。Schroeder等[14]研究了影响机动车避让的影响因素,机动车对更自信的行人避让的可能性会增大,但是随着车速的增加以及机动车成队行驶,避让的可能性会下降。Chen等[15]构建了一个在低等级道路上行人可以从道路上任意位置穿越机动车流的模型,行人可以在路段任何位置随机产生,并根据临界时间间隙决策是否过街,而机动车的运动行为采用NaSch模型。孙泽等[16]在行人和机动车的位置不同的情况下,引入行人和机动车的冲突干扰规则,构建了能够刻画人行横道处机动车和行人相互干扰行为的元胞自动机模型。Xin等[17]提出了一个行人和机动车的元胞自动机模型,研究混合交通的特征,该模型由行人模型和机动车模型组成,在机动车模型中考虑机动车与人行横道之间的距离影响,机动车依据距离选择不同的运行模式。Lu等[18]构建了一个在无信号交叉口上考虑机动车的避让和行人过街决策行为的模型,进一步考虑了机动车的避让行为,机动车的避让模型采用了Schroeder等[14]所提出的考虑行人的行为以及驾驶员特征的模型,但是缺少对人行横道等候区行人对机动车避让影响的具体分析。对于等候区域的过街行人对机动车避让行为的影响,需要同时考虑下一时刻会进入到冲突区域的行人,和下一时刻还未进入冲突区域的行人两个方面。
本文试图构建一个考虑过街行人和机动车交互行为的微观模型,可以较为真实地模拟无信号交叉口上行人和机动车的行为。文中考虑系统中行人过街决策和机动车避让行为,分析了行人过街中临界时间间隙受等待时间的影响以及机动车避让过程中等候区域中的行人发挥的作用。通过数据对该模型进行校准,将行人的过街决策行为和机动车的避让行为进行综合分析,并考虑无信号人行横道上行人和机动车之间的运动行为。
1 模型构建
本文通过建立一个元胞自动机模型来模拟在无信号人行横道处行人和机动车之间的干扰行为,元胞自动机模型模拟复杂的现象时,可以通过一些简单的规则来实现。在元胞自动机模型中,各个粒子之间的关系是通过易于理解行为规则来实现的,而不是函数或者方程[19]。
1.1 模型框架
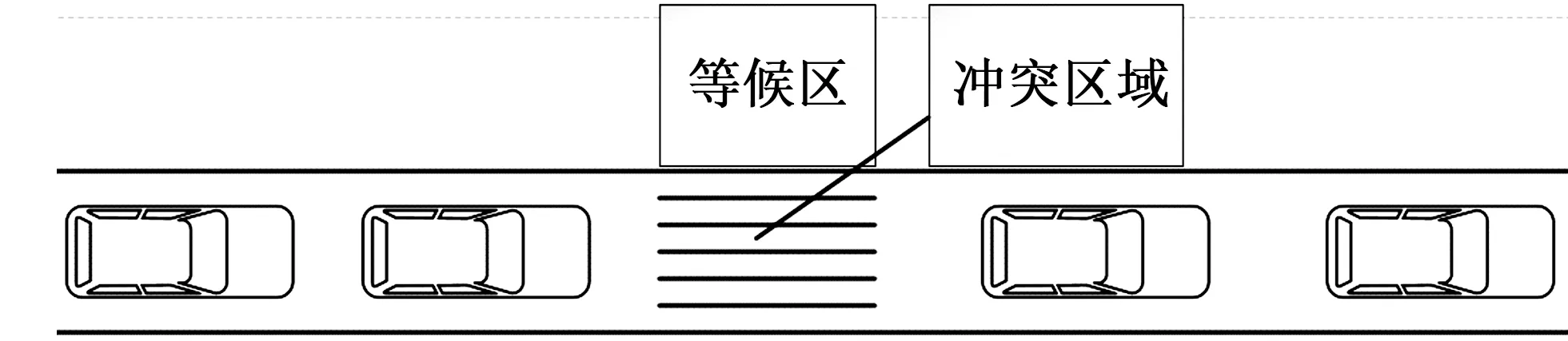
图1 模型框架Fig.1 Model framework
本模型主要包括两部分:行人模型和机动车模型。行人模型主要由过街决策模型和运动模型组成;机动车模型主要由机动车避让模型和运动模型组成。模型主要模拟的是在无信号人行横道处的单向行人与单车道机动车的交互行为。如图1所示,包括机动车道和人行横道,机动车从左边界进入,行人从上边界进入。仿真场景总共有17×408个元胞组成,每个元胞大小为0.4 m×0.6 m,等候区域宽度为9个元胞,冲突区域宽度为8个元胞,人行横道宽度为8个元胞,每个机动车占据6×8个元胞,每个行人占据一个元胞。下面将对每个模型进行详细的介绍。
1.2 行人模型
行人模型主要由过街决策模型和运动模型组成,行人的过街决策模型主要是行人在当前道路条件下,判断是否满足过街条件,进而做出是否过街的选择;行人的运动模型借鉴Blue等[20]提出的单向行人元胞自动机模型。
1.2.1 过街决策模型
每当行人到达等候区域的边缘时,需要根据当前的时间间隙是否满足过街临界值,做出通过人行横道或者是选择等待的决策。时间间隙即行人即将踏入道路与机动车头刚到行人垂线处的时间差。 本文参考Naser等[1]提出的临界时间间隙为6.48 s,如果当前的时间间隙大于临界时间间隙,行人选择穿越,否则,行人选择等待。
其中,lv为行人左侧第一辆机动车车头与行人过街路径之间的距离;lp为行人当前位置与机动车道靠近行人边缘处之间的距离;vv为行人左侧第一辆机动车的速度;vp为行人期望速度;t是行人过街的临界时间间隙。
定义临界时间间隙t为等待时间w的函数:
其中,w为等待时间,从行人进入等候区域开始直到踏入冲突区域结束;w0为行人等待时间阈值下界,当超过该阈值时,行人的临界时间间隙将会随着等待时间的增加而减小;w1为行人可接受的等待时间阈值上界,当超过该阈值时,行人的临界时间间隙将会达到最小值,并保持不变;tmin表示行人可以接受安全过街的最小临界时间间隙。

图2 临界时间间隙与等待时间关系曲线Fig.2 Curve of relationship between critical gap and waiting time
Martin[21]提出当行人等待时间超过40 s时,行人违章数量迅速增加,因此本模型w0=40 s; Shi等[7]通过调研北京街道发现,行人最大的等待时间为56 s,因此模型w1=56 s。临界时间间隙与等待时间之间的关系如图2所示。
由于无信号人行横道处的路权分配并不明显,还存在着行人跟随其他行人进行过街决策行为,被称为跟随现象或者群体行为。Zhou等[22]对危险情况下行人过街进行了研究,发现行人更倾向于与他人保持一致,冒险跟随他人穿越人行横道。因此在本模型中,如果冲突区域的行人数量大于wp,行人将采取冒险行为穿越行人横道。
1.2.2 运动模型
本文参考了Blue等[20]提出的单向行人流元胞自动机模型,主要包括换道和速度确定。行人只考虑当前路、左、右三个方向,并期望以最大的速度通过人行横道。
1.2.2.1 路径选择
如果当前路的左侧超出边界,或者左侧被其他行人占用,或者其左侧为空,但是其左侧第二列对应的位置在边界内并且被一个行人占用,则认为当前路左侧被占用;右侧同理;
如果当前路的左侧和右侧都被占据,则选择当前路,其他情况进行下一步;
如果当前元胞前方存在唯一最大的空元胞,则选择该方向;
如果存在多个方向空元胞值最大,(1)三个方向均为最优,则以概率80%/10%/10%选择当前路/左/右;(2)当前路和左(右)两方向最优,则以概率80%/20%选择当前路/左(右);(3)左和右两个方向最优,则以概率50%/50%选择左/右。
1.2.2.2 速度确定
如果最优方向的空元胞值小于行人的最大速度,则令行人的当前速度等于最优方向的空元胞值,其他情况,令行人的当前速度等于最大速度。
1.2.3 行人位置更新
行人对时间间隙进行判断,看是否满足自己可以安全通过,如果不满足,行人选择在等候区域排队;如果满足,或者冲突区域人数较多,亦或者当前机动车采取避让,行人决策进入冲突区域,然后以尽可能快的速度穿过冲突区域。
1.3 机动车模型
机动车模型主要由机动车避让模型和运动模型组成。机动车的避让模型是机动车针对等候区域行人,对是否避让行人、优先行人通过做出选择的模型;机动车的运动模型参考了NaSch模型[23]。
1.3.1 机动车避让模型
每当机动车到达人行横道影响区域时,机动车会受到影响,当下一时刻机动车可以进入冲突区域时,机动车需要进行选择,是否进行避让。如果选择避让则机动车选择减速,下一时刻行驶到人行横道处前,等候行人通过;反之,则选择行驶通过人行横道。而等候区域的行人会对机动车是否选择避让产生很大影响,通过数据发现机动车的避让概率会随着等候区人数的增加和行人的速度增大而增加。本文试图分析机动车的避让概率和等候区行人的关系。
本文用线性关系来刻画机动车避让概率和等候区行人之间的关系,分两个阶段进行,避让概率和等候区行人数量之间的关系式:
其中,pmin为机动车受到等候区域行人数量影响下的避让概率;wpn为等候区域行人的数量;wp0表示机动车受等候区人数影响阈值。
避让概率和等候区行人速度的关系:
其中,pmin为机动车受到等候区域行人数量影响下的避让概率;py为机动车的避让概率;vp为等候区行人中的最大速度,vp0为机动车受等候区行人速度影响的阈值。
当wp0=wpmax,vp0=vpmax时,避让概率与等候区行人数量、速度关系如图3所示。
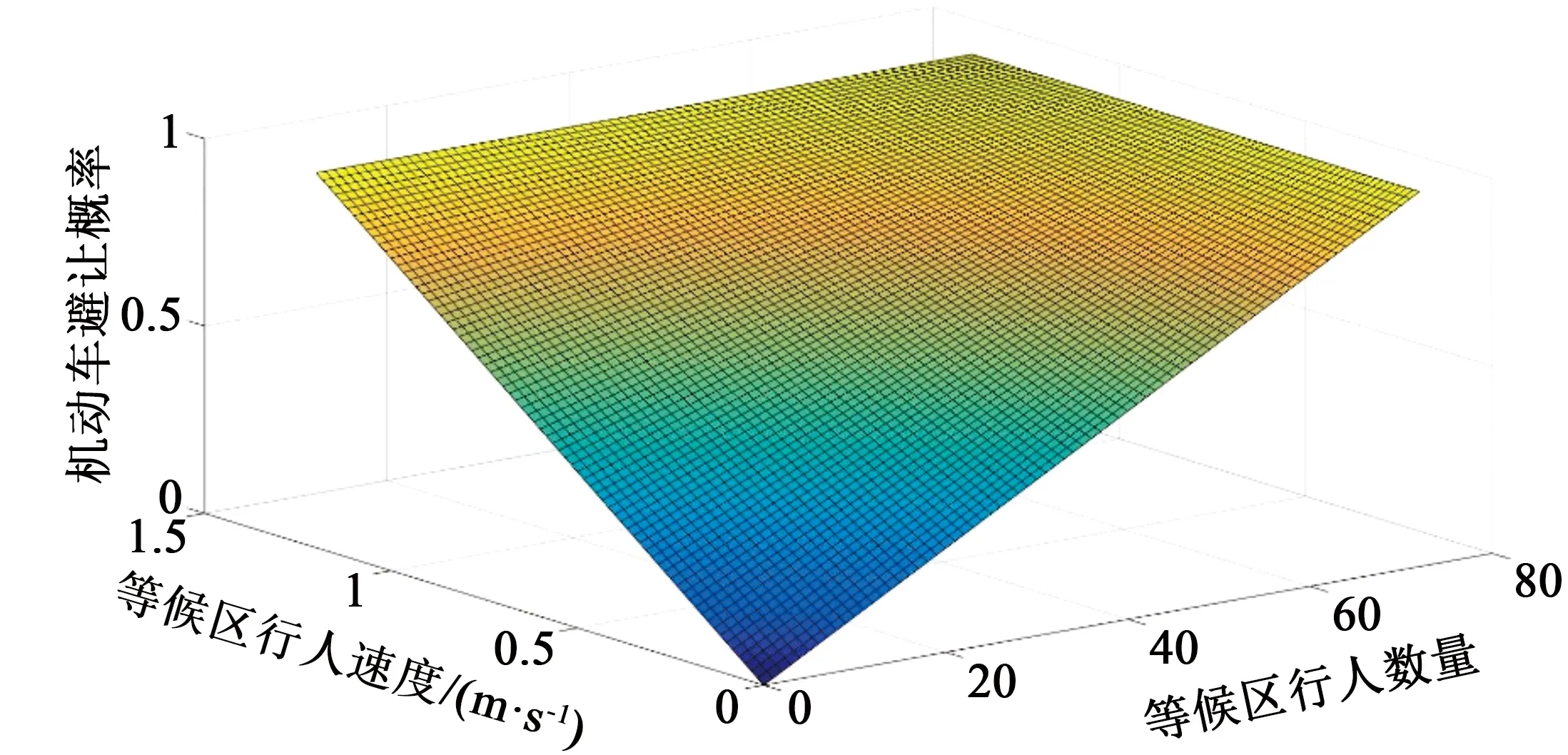
图3 避让概率与等候区行人数量、速度关系Fig.3 Yielding rate and the number and speed of pedestrians in waiting area
1.3.2 运动模型
机动车由于受到人行横道的影响,需要采取相应的措施来避免与行人发生碰撞。有很多学者对机动车的避让距离进行研究,避让距离是在可能发生冲突时,机动车采取相应行为的位置与人行横道之间的距离,本文采用避让距离为28 m[24]。机动车开始受到人行横道处的影响,最大速度满足不大于安全速度的条件。具体的演化规则为:
(1)加速,vn+1→min (vn+a,vmax),根据现实中司机期望以最大的速度行驶的特性,每个时间步的加速度为a;
(2)减速,vn→min (vn,dn),驾驶员为避免和前车发生碰撞而采取减速措施;
(3)随机慢化,以概率p,vn→max(vn-a,0),由于各种不确定因素造成车辆减速;
(4)位置更新,xn→xn+vn,车辆按照调整后的速度继续行驶;
如果行驶进入人行横道影响区域即28 m内,为保证安全,机动车速度应不大于安全速度,即下时刻机动车可以停下来,vsafe为7.8 m/s。
在加速阶段,vn+1→min(vn+a,vmax,vsafe)。
1.3.3 机动车位置更新
如果机动车距离人行横道大于28 m或者人行横道冲突区域和等候区域都没有行人,则机动车不受人行横道影响,按正常规则运行;其他情况,为保证安全,机动车速度应不大于安全速度。
2 模型校验和仿真
2.1 模型参数标定
在北京东皇城根南街一处无信号人行横道处收集数据,具体位置如图4所示,数据搜集在工作日周三和周日两天晚高峰16:30—18:30。该地点机动车车速约为30 km/h,行人流量约98人/h,机动车流量127辆/h。
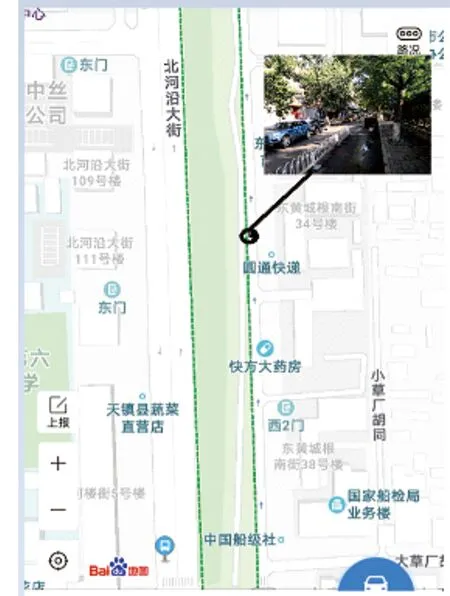
图4 观测点的位置和照片Fig.4 Location and photo of the observation point
为确定本文中提出的机动车避让概率模型中参数a,取vp0=6 m/s,等候区域行人的速度值取平均值0.6 m/s,得到避让概率与系数a之间的关系如图5所示。

图5 避让概率与系数a关系曲线Fig.5 Curve of relationship between yielding rate and coefficient a
在该无信号人行横道处统计了508辆,其中有489辆遇到是否避让选择,有103辆车选择了避让行人,避让概率约为0.21,因此a取值8。机动车避让过程见图6。

图6 机动车避让过程Fig.6 Vehicle yielding process
如图6所示,占据8×6网格的黑色区域代表机动车,占据一个单元格的黑点表示一个行人,两条线条之间表示人行横道。图6为机动车和行人位置随时间变化截图,时间步长为1 s,从图中可以清楚地看到,在等候区有一名行人在等待穿越人行横道,但是时间间隙较小,不满足穿越条件,机动车选择了避让,等待行人穿越,行人顺利地穿越了人行横道。
为验证本文所提出的模型的准确性,通过行人延误对其进行校验,对该地区行人延误分布进行分析。仿真时间步长为1 s,步数为10 000,模型运行结果如图7所示。
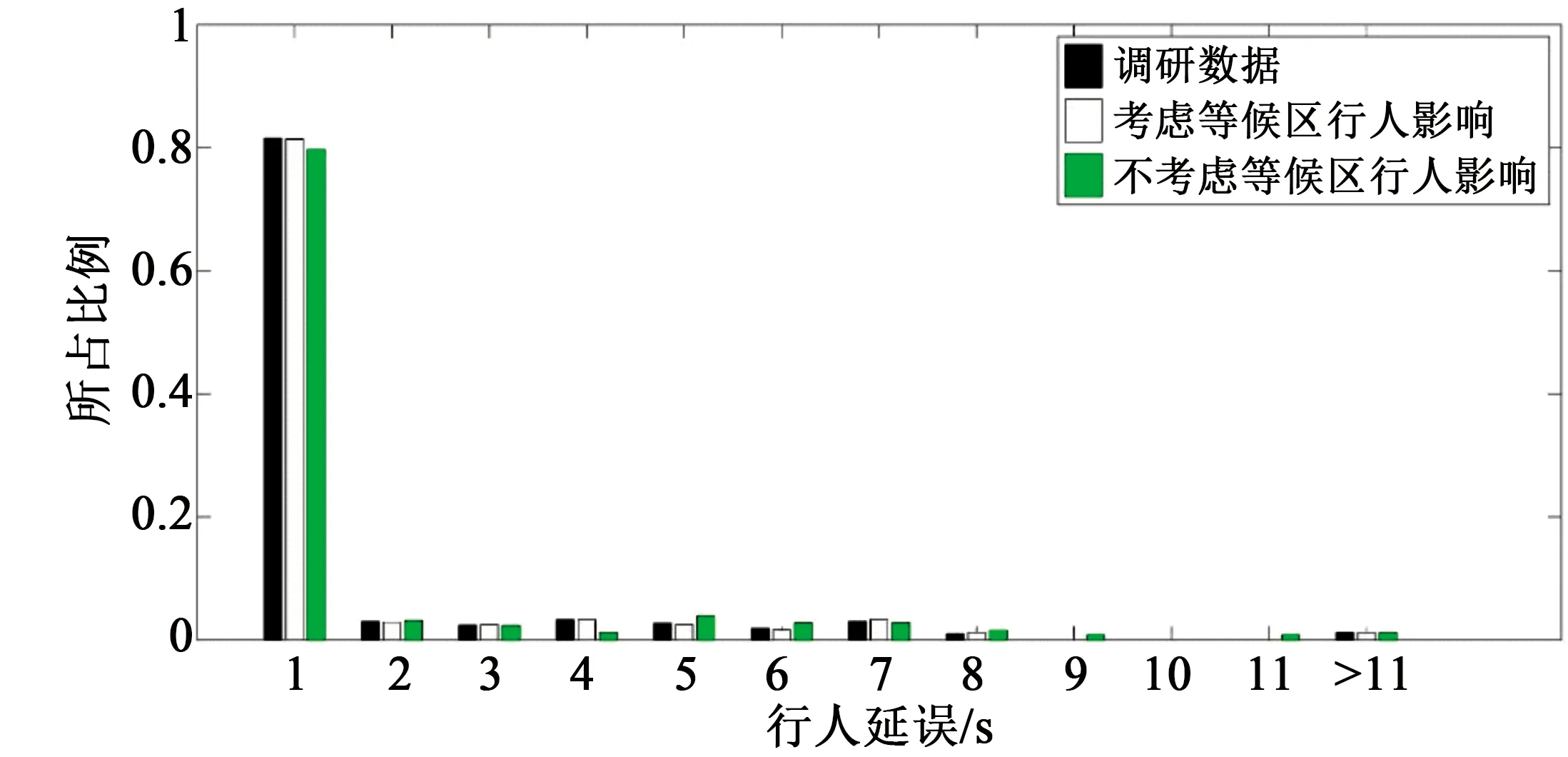
图7 行人延误分布Fig.7 Pedestrian delay distribution
图7是行人延误比例的分布图,可以看到过街行人有80%左右延误在1 s以内,即表示行人并没有在等候区域等待,而是直接选择过街,因为行人观察满足临界时间间隙,或者采取从众行为冒险穿越,亦或是机动车采取避让行为。而延误在4 s左右时,行人数量增加,受到行驶来的机动车的影响,决策在等候区域等待。可以看到在4 s和7 s处的行人相对多一些,可能是分别受到一辆或者两辆行驶来的机动车影响。延误大于11 s的行人很少,可能受到路段较多车辆,以及机动车的随机减速的影响。

表1 仿真数据与调研数据对比
如表1所示,将行人延误比例分布构建成向量,然后通过计算考虑等候区与未考虑等候区域的两个向量,计算与调研数据向量之间的欧氏距离来量化相似程度,得到欧氏距离分别为0.005 4和0.034 0,考虑等候区域影响更接近实际数据。
对调研数据和实验仿真数据进行K-S检验,结果见表2,建立双侧检验假设,H0:两组数据行人延误分布相同;H1:两组数据行人延误分布不相同。由于双侧显著性1>0.05,故拒绝假设H1,接受H0。

表2 K-S检验结果
2.2 仿真实验与结果
通过仿真对该地区的交通特性进行分析,本仿真采用开放边界条件,模型描绘了一个单车道上的无信号人行横道,仿真场景总共有17×408个元胞组成,每个元胞大小为0.4 m×0.6 m,实验步数为10 000,步长为1 s。
道路的速度限制对旅行时间的影响见图8。
机动车限制速度即为机动车在道路上所能达到的最大速度值,机动车在路段上行驶完全程所需要的时间为机动车的旅行时间,由图8中可以看到,总体上机动车旅行时间随着限制速度的提高而减少,但是随着限制速度的提高,机动车旅行时间的下降趋于平缓,即随着机动车限制速度的提高,行人对机动车旅行时间的影响程度越明显。尤其是当机动车限制速度大于16 m/s时,机动车旅行时间下降程度不明显,由于受到无信号人行横道处行人过街的影响,导致机动车为避免与行人产生冲突,而采取避让措施,不能保持较高速度持续运行。
机动车流量与机动车到达率、行人到达率之间的关系见图9。
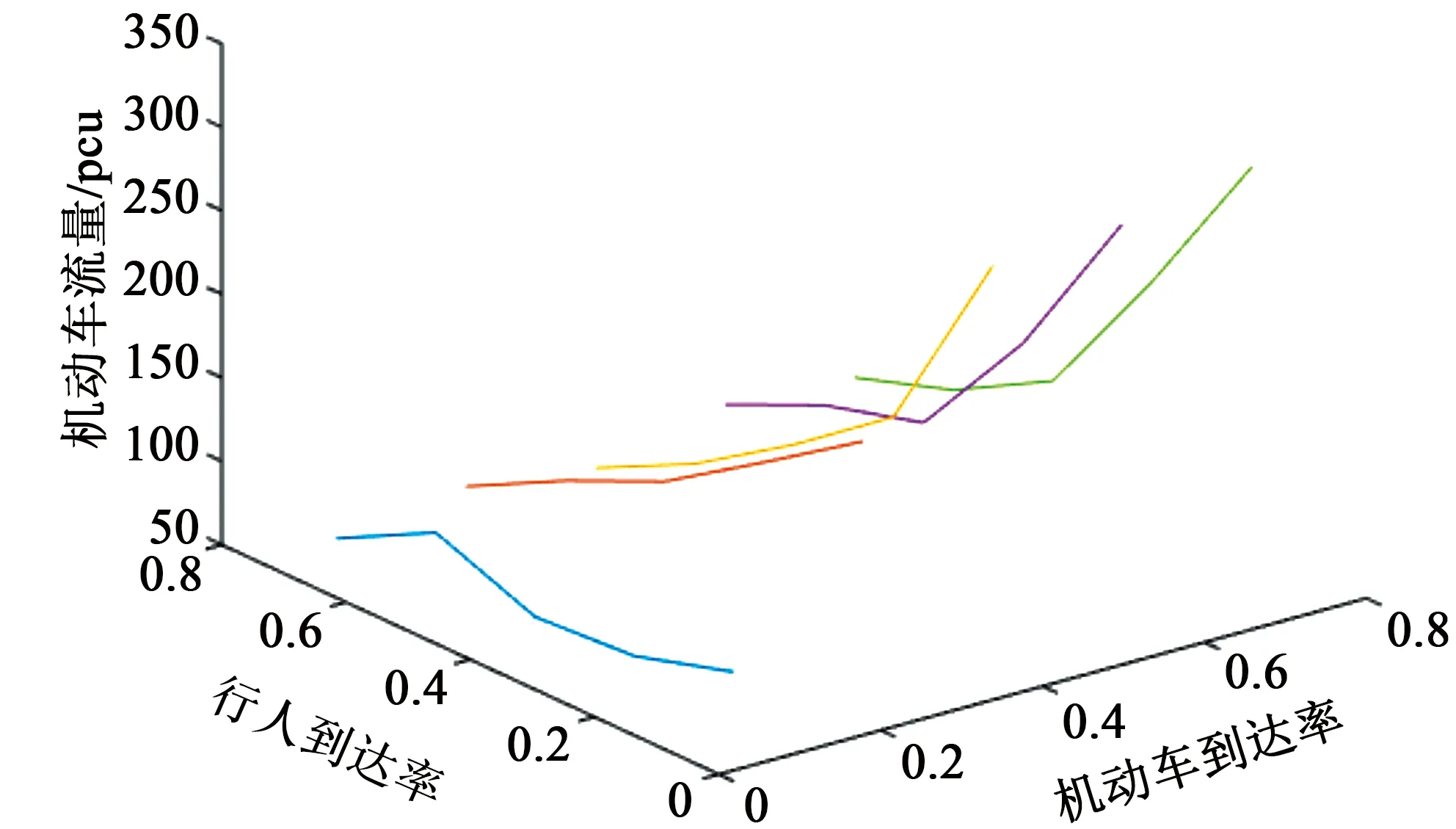
图9 机动车流量与机动车到达率、行人到达率之间的关系Fig.9 Relationship between vehicle flow and vehicle arrival rate and pedestrian arrival rate
由图9可以看到,总体上机动车流量是随着机动车到达率的增加而增大的,可以看到行人到达率的不同会影响机动车的饱和流量,行人到达率越高机动车的饱和流量值会越小,因为行人数量越多,对机动车的干扰程度就越大。当行人到达率为0.24,机动车到达率小于0.4时,机动车处于自由流状态,机动车流量随着机动车到达率的增加而增加;但是当机动车到达率大于0.4时,机动车流量呈饱和状态,流量几乎不再增加。
等候区行人数量与机动车延误见图10。
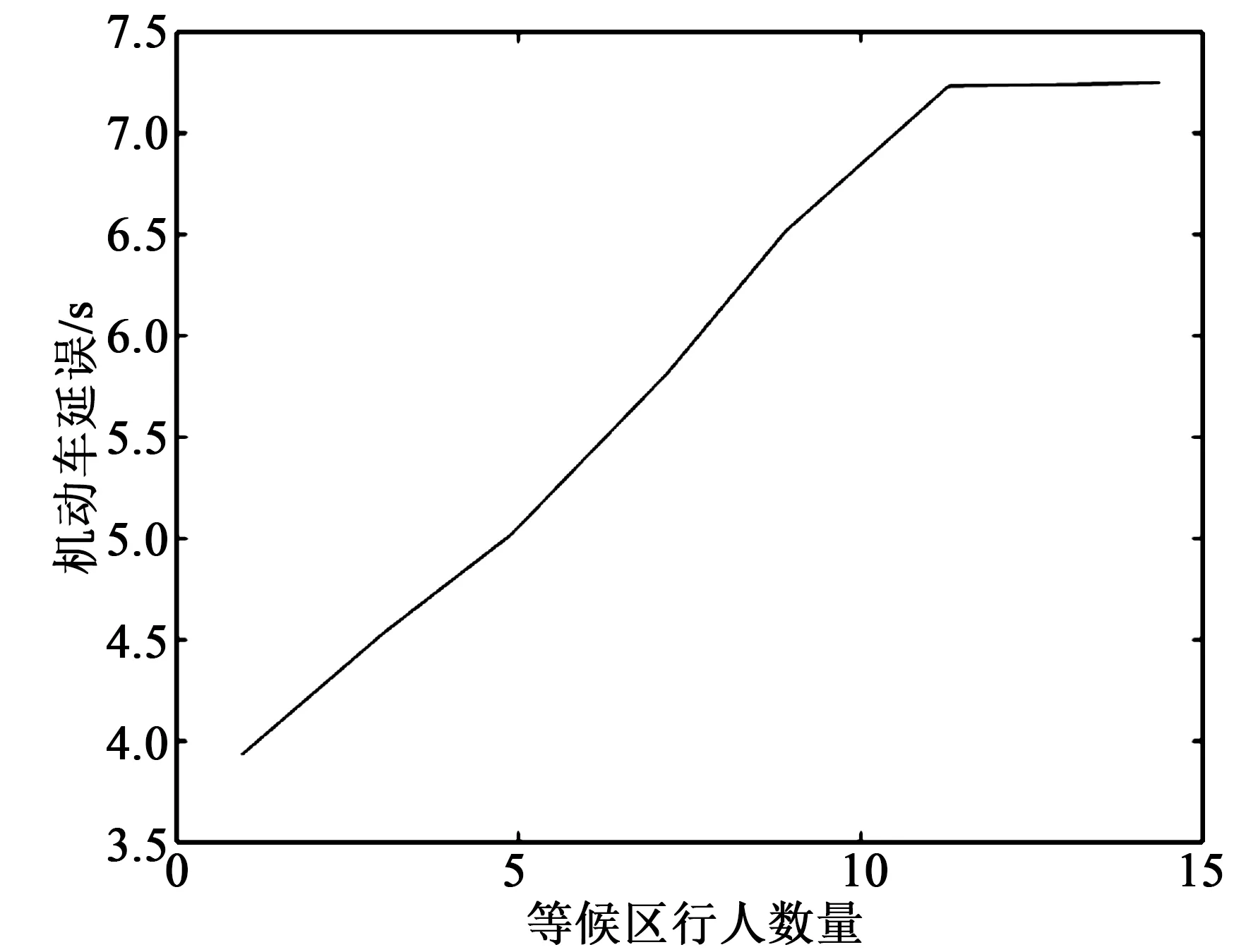
图10 等候区行人数量与机动车延误Fig.10 The number of pedestrians in waiting area and vehicle delay
等候区行人数量为在整个时间段内等候区域中存在的过街行人数量的均值,机动车延误时间也为整个时间段内所有通过人行横道的机动车延误均值。当等候区行人数量小于11时,机动车的延误随着等候区行人的数量呈线性增加;当等候区行人数量达到11人时,机动车的平均延误值为7.2 s;当等候区的行人数量大于11时,机动车延误值增加值很小,由于随着等候区行人数量的增加,机动车避让概率逐步增大,因此机动车延误增加;当人数大于11时,几乎所有车辆都选择避让,机动车增加的延误时间约为增加的行人穿越人行横道产生的时间增加量,机动车延误增加值较小。因此,机动车的延误随着等候区人数的增加由线性增加逐步趋于平缓。
3 结论
本文提出了一个无信号人行横道处的描述行人和机动车之间相互干扰的元胞自动机仿真模型。本模型既能描述出机动车的行为也可以捕捉到行人的行为,通过北京皇城根南街某处无信号人行横道处收集到的数据对机动车避让模型中的参数进行标定。
通过仿真发现以下交通特性:
在无信号人行横道地区机动车的旅行时间随着速度限制的提高而降低,但是随着速度的逐步增加机动车的旅行时间下降趋于平缓,当机动车速度大于16 m/s时,机动车旅行时间下降不明显。随着机动车限制速度的提高,行人对机动车旅行时间的影响程度越明显。
机动车的流量总体上会随着机动车到达率的增加而增大,但是增加幅度在逐步减小,机动车流量逐步达到饱和;当机动车到达率一定时,机动车因受到行人的干扰,反而随着行人到达率的增加而下降,行人数量越多,对机动车的干扰程度就越大。
机动车延误会随着等候区行人数量的增加而增大,但会逐渐趋于平缓。当等候区行人数量小于11时,机动车延误与等候区行人数量呈线性增加;当等候区人数为11时,机动车延误为7.2 s;当等候区人数大于11时,机动车延误增加量较小。
本文研究的是单车道单向机动车与过街行人的干扰研究,今后还可以拓展研究场景,对车站处出租车留客区,以及双向多车道处的无信号人行横道处的行人与机动车的干扰冲突进行研究。