基于海流的海洋微小信号前端放大电路的研究
2019-02-23崔辰元杜立彬陈光源贺海靖雷卓吴承璇
崔辰元,杜立彬,陈光源,贺海靖,雷卓,吴承璇
(齐鲁工业大学(山东省科学院),山东省科学院海洋仪器仪表研究所,山东 青岛 266061)
地球作为太阳系中唯一存在大量水的星体,海洋总面积约为3.67亿平方米,占全球总面积的百分之七十。海洋中蕴含着丰富的矿产资源,是全球生命支持系统的一个重要组成部分。海洋资源的开发利用,在很大程度上推动了经济的发展,满足了人类向海洋要效益的愿望,对于缓解目前资源短缺的现状起到了一定的作用[1]。由于海洋各部分的密度、温度、气压梯度、气候环境等参数不同,并且受地转偏向力以及月球引力等多重因素影响,产生了海洋的一种重要活动——海水流动[2]。海流运动的方向和速度是海洋学的重要参数,对海水流动进行探测是目前人类探索海洋的重要活动,研究海水的运动规律,对了解海洋地理环境以及海洋对大气、环境等的影响具有非常重要的参考价值[3]。
海流传感器主要测量海水的流速和流向,配合其他配件,安装在浮标、锚定资料浮标、浅标、海床基、自治水下机器人、水下滑翔机、调查船等海洋测流平台上,用于海流观测[4]。但是由于受到海底生物发出的声音、船只等海洋交通工具的电磁信号以及气候变化、海底地质变化等方面的影响,使得海流信号噪声大、难以分辨,给观测造成了很大的困难[5]。本研究主要以地磁场作为激发场源的地磁式传感器作为研究对象,由于海水流动时切割地磁场产生的感应电动势非常微弱,相对于海底噪声环境更是微不足道,这给采集过程增加了许多的困难。
近年来,越来越多的沿海国家开始重视对海洋环境的监测和对海洋参数的检测,特别是经济发达的欧美国家,早在19世纪末就开展了多项对海洋开发和利用的研究工作,产品技术成熟,已经广泛地应用到海洋调查、科学研究及国防军事之中。目前掌握电磁式海流探测技术并生产这类仪器的国家只有美国和日本,两国共同占据了全部国际市场,并对非盟友国家实行禁运。我国作为拥有较长海岸线的国家,从20世纪70年代开始进行船用投弃式海水剖面测量技术研究[6],随后山东省科学院海洋仪器仪表研究所开展了投弃式温深仪(XBT)和投弃式温盐深仪(XCTD)的研制。进入21世纪,国内开展了地磁式海流剖面测量仪器的研究,相关的理论都处于探索中。国家海洋技术中心的刘宁[2,7-8]等对地磁式海流剖面测量仪器的前期理论做了大量的工作,分析了测量设备在海水中的相关运动规律,测量探头在海水中阻力系数与雷诺数的关系式等,并进行了相应的数值模拟,但未对后续的电路设计、采集微小信号放大等实际工作有进一步研究。
目前,常用的放大电路多采用集成运放来搭建,其增益高、输入电阻大且输出电阻低、共模抑制比高。同时种类很多,可满足电路的不同要求和功能。国外以海流信号为基础的微小信号放大电路技术已相对成熟,信号增益大、带宽较宽、放大信号稳定。国内针对微小信号放大电路的研究也有很多,但主要是应用于医疗、地质勘探等方面,这类信号幅值多在微伏级,通过对信号放大可达到毫伏级或者伏级的观测水平。例如殷铸灵[9]通过两级级联达到100 dB增益放大倍数;刘懿[10]针对生物信号进行放大电路设计,其放大增益可达到109 dB,但其采集信号已达到微伏级。海流信号与这些信号相比,待采集信号幅值更低,背景噪声更加复杂,采集环境恶劣。海流信号的有用信号为纳伏级信号,且海底噪声巨大,所以采集工作比较复杂。贾志成等[11]对地磁式海流剖面测量仪器的研究也处在前期设计实验阶段。基于目前的研究,本文对海流电场微弱信号进行滤波提取,完成了对该信号同相分量补偿式放大电路和多级放大选频电路的设计,实现了海流微小信号的低失真、大比例放大的设计要求。
1 海流信号探测原理
海流是指海水大规模相对稳定的流动,是海水重要的普遍运动形式之一。由于海流的水平尺度远远大于其铅垂尺度,所以在实际工作中,以研究水平海流为主[12-15]。海水运动时,切割地磁场磁力线,产生感应电动势和感应电流。在地磁场稳定的情况下,感应电动势的大小主要取决于海流的速度。通过测量海流产生的感生电场,就可以知道海流的速度大小,从而研究海流的运动特征[16]。
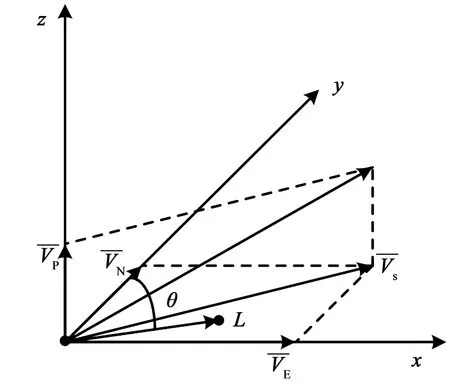
图1 建立海流流向坐标Fig.1 Establishment of ocean current flow coordinates
如图1所示,建立以水平海流为研究对象的海水流速测量模型,以x轴指向地磁东向、y轴指向地磁北向、z轴向上建立直角坐标系。当海流沿任意方向水平流动,感生电压的测量方向与y轴存在一个夹角(测量方位角θ)时,水平放置的距离为L电极两点间探测到的海流感生电动势为:
(1)

2 海底噪声分析
作为水声信道中的一种干扰背景场,海洋噪声是本研究中噪声滤除的主要研究对象。文中研究的信号主要是通过调制后的低频信号,因此在分析海洋噪声干扰时主要针对低频段噪声。
海洋环境中出现的低频电磁噪声主要是由地球的地壳运动、潮汐、湍流以及大气中的声源引起的。经过数十年的发展,海洋环境也发生了巨大变化[17]。随着人类在海洋中的活动日益深入,各类船舰、潜艇等在海洋中产生的噪声也在不断增加。目前,海洋环境中出现的超低频、低频噪声多与航船、潜艇相关。航速的提高、推进功率的增大、螺旋桨叶片频率以及潜艇航速的变化,给海底噪声带来了较大数量级的增长。美国的McDonald等[18]在同一海域的不同时间对海洋环境噪声进行了测量,显示九十年代后期的十年间,30~50 Hz海洋环境噪声级增加了10~12 dB;高于50 Hz频段的噪声并没有明显的增加,甚至在高于200 Hz海洋环境噪声级反而有所降低。由此可见,当前海洋环境噪声中的低频段主要集中在50 Hz附近,也是本次研究所需采集低频信号的主要干扰因素。但是由于低频噪声主要由轴频电场和工频电场在超低频频段内的分量产生,并与潜艇航速有直接关系,出于保密需要,国内外公开的文献中并无具体数值可参考,此处无法进行仿真实验。
3 前端弱信号处理电路设计
3.1 电路设计总体思路
本文重点研究的是通过滤除采集信号中的干扰信号,将有效信号提取出来,并将纳伏级信号放大将近百万倍,达到毫伏级,送入后级信号处理电路中。由公式(1)可知,感应电动势主要与地磁场强度有关,但在海洋中地磁场强度微弱。以中低纬度地区为例,通过计算可知,1 cm/s海流切割地磁场所产生的感生电场量值小于1 μV/m,大约为50 nV,但在传感器下沉的过程中,本身产生的强干扰感生电场已超过7 μV。由此可知,电路中主要设计工作集中于前端弱信号处理电路,特别是对纳伏级微弱信号的处理。同时,由于海底噪声包括生物噪声、人为噪声,还会有地震噪声和雨噪声等偶发性噪声,作为水声信道中的强干扰背景场,需要检测提取的信号非常微弱,滤波工作的重要性不言而喻。
在采集信号前期,通过对探头的设计,使得探头在下沉过程中将信号调制为窄带单频信号,这样做的优点有两个:(1)该窄带频段为海洋中的超低噪声频段,可最大化地降低信号所处场中的噪声;(2)单频信号中的噪声更易于优化,做降噪滤噪处理。
在电路设计过程中,首先要考虑的是将有效信号从噪声中提取出来,滤波电路在选择和设计过程中,要将工频干扰放在滤波首位。选择滤除频带较窄的滤波电路,以免将有效信号一并滤除,影响有效信号的质量。通过滤波电路的有效信号非常的微弱,在选择放大器芯片时需要选择自身电噪声尽量小的器件,以免使信号淹没在电路所带来的噪声中。
在设计过程中还要考虑到后期需要搭配电极共同完成海流信号的测量,但是电极下沉时也会切割地磁场,产生附加感生电动势,属于超强干扰。所以在该电路设计时,需要设计模拟电路来补偿电极自身下沉过程中切割水平磁力线产生的电场信号。
综合以上因素,电路的设计思路如图2所示。
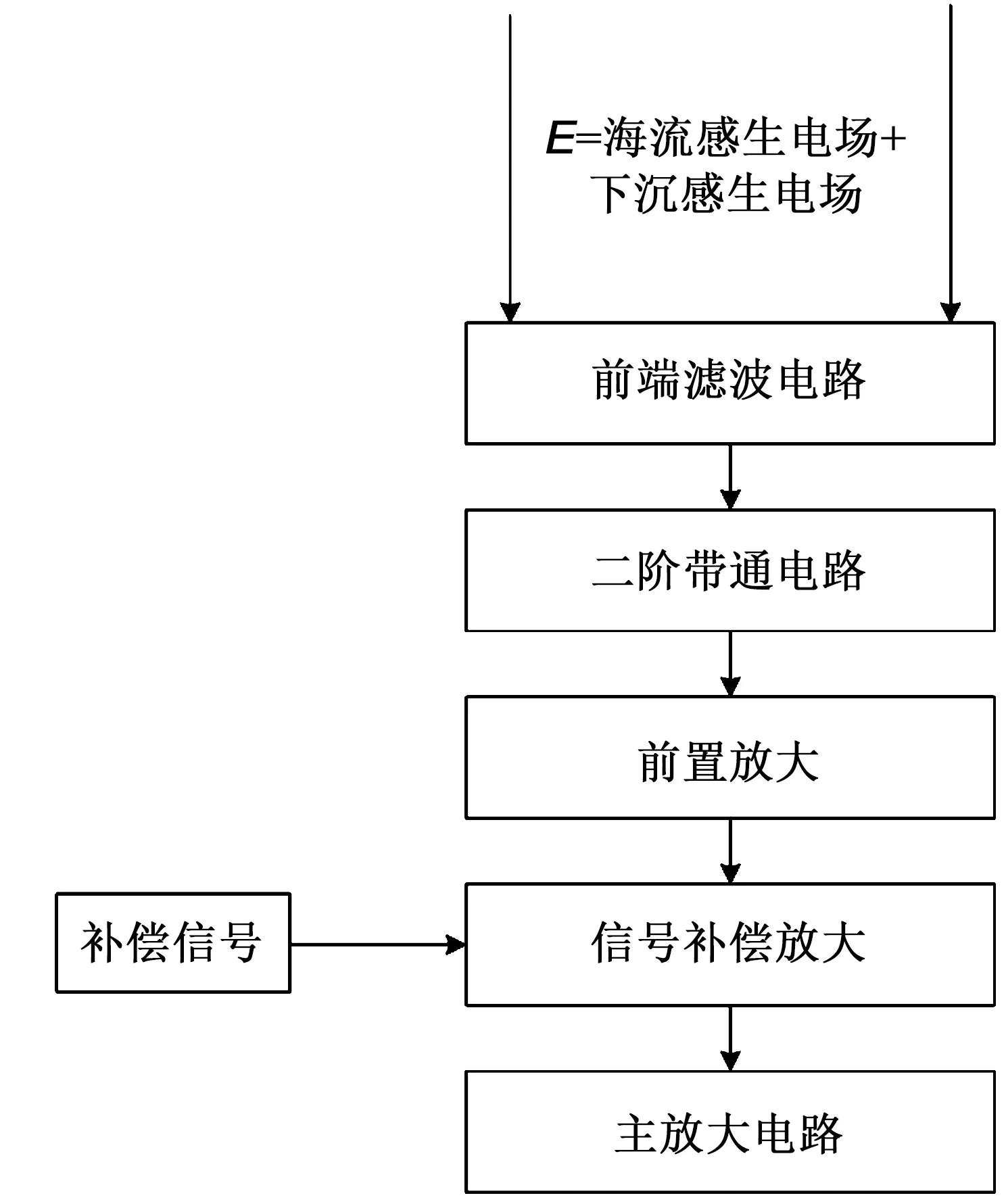
图2 电路设计流程图Fig.2 Flow chart of circuit design
由图2可知,由于本设计对信号的放大倍数太大,如果采用单次较大倍数放大的方法会给信号引入较强的干扰,所以采用了三次级联放大的方法:
(1)对前端采集到的感生电场信号进行基础的滤除工频干扰和前级放大,对海流电场感生电动势进行放大;
(2)由于传感器下降过程中,其电极切割磁感线产生了下沉感生电动势,并被传感器采集到,所以对该信号进行了补偿式放大,将信号中的电极下沉感生电场信号部分进行了抵消;
(3)随后对信号进行主控放大若干倍。
至此,该海水切割磁感线产生的感生电场信号被放大到示波器可观测的范围。因海流电场信号在下沉中均被调制为低频近似单频信号,故在探头前端弱信号处理电路中加入中心频率点为该低频频率的二阶带通滤波电路,由此提取有效信号。
3.2 前端滤波电路的设计
由于采集到的信号通过调制到低频段,在前期电路设计调试过程中,50 Hz的工频信号对于有用信号来说,干扰很大,在电路中首先需要尽量滤除的就是此信号。滤波电路包括有源滤波和无源滤波,无源滤波的优点是不会引入多余的电噪声干扰,但滤波过程中过渡带较宽,谐波滤除率较低。图3所示是无源滤波电路及其仿真图,主要滤除50 Hz工频干扰的电路,可以看到其滤波效果并不理想。
所以,本次设计采用了具有滤波、反馈、调节功能的可调Q值双T有源带阻滤波电路,如图4a所示。其中R4具有调节电路品质因数Q值的作用,Q值越大,阻带宽度越窄,电路的选频性能越好。同时通过调节R4,可以设置阻带中心频率,阻带带宽在2 Hz以内。图4b是该电路的仿真效果图。
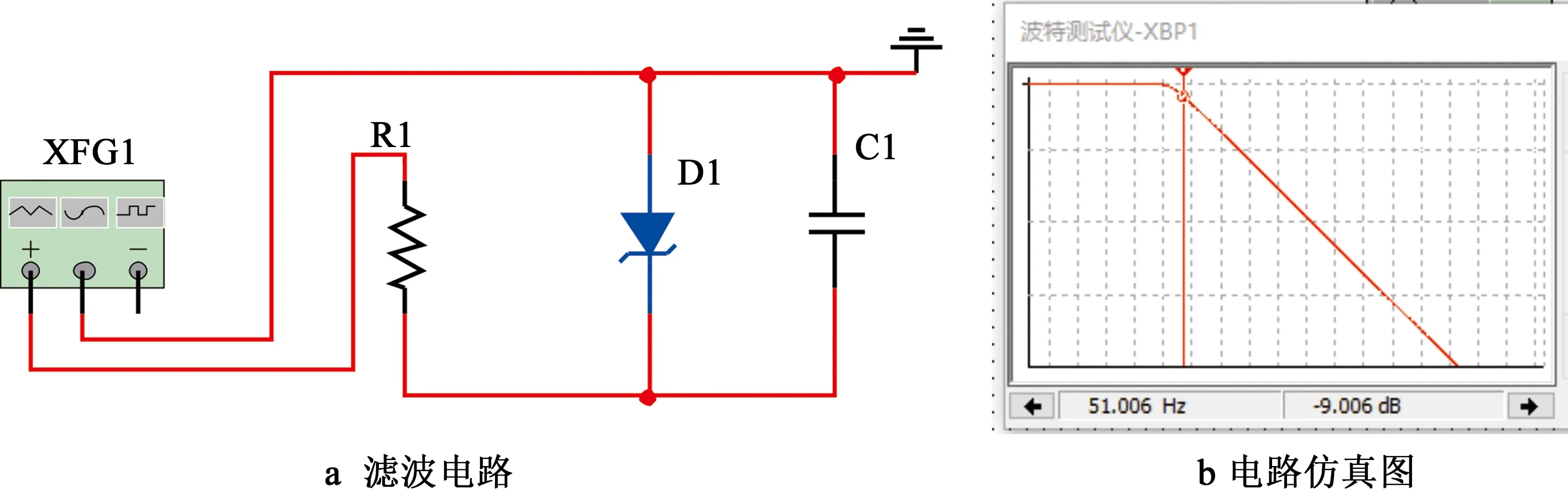
图3 无源滤波电路及其仿真图Fig.3 Passive filter circuit and its simulation diagram

图4 滤除50 Hz工频电路及其仿真图Fig.4 Circuit for filtering out 50 Hz power frequency and its simulation diagram
3.3 前置放大电路芯片选择
对于微弱信号的检测需要选用自身噪声极小的放大器对信号进行放大。由于前期采集到的信号为纳伏级信号,所以放大器芯片的噪声不能超过10 nV,否则有用信号在前端放大时就被淹没在芯片自身带来的噪声中。如图5a所示,这是一款最低噪声为2.5 nV/Hz1/2的芯片AD8022,在输入信号为20 nV,放大一千万倍后,信号已被淹没在芯片的噪声中,且偏置非常大。
通过不断在Multisim中仿真,并阅读芯片的数据手册,寻找到一款最低噪声为1.1 nV/Hz1/2,低失真,带宽为10 MHz,偏置电压为10 μV的芯片AD8599。通过在Multisim中进行仿真,如图5b中所示,在相同的输入信号、相同的放大倍数下,可看到该芯片的低噪声、低电压偏置对微弱信号的影响相对非常小,基本达到所需要求。经过前端放大电路放大后,此时信号已接近微伏级。

a AD8022放大仿真图 b AD8599放大仿真图图5 前端放大电路Fig.5 Front-end amplifier circuit
通过前端放大电路的放大后,信号对元器件的要求不再苛刻,之后的放大电路选择仪表放大器。仪表放大器具有非常低的直流偏移、低漂移和低噪声,具有高输入阻抗、足够大的放大倍数、有效抑制共模信号等特点,适用于精确性稳定性非常高的电路。
3.4 二级补偿式放大
电极在海水中下落,切割地磁场产生的感应电动势通过后期的信号处理,可得到所测区域海水的相对速率,同时线圈在随电极下降过程中切割磁感线产生的信号将所测区域海水的流动方向等其他辅助信息传递给后期信号处理平台,构成海水的流速信息。但是由于探头自身也会切割磁感线,产生附加电场,对所需采集的信号属于强干扰。如果单独设计电路抵消附加电场,会增加整体电路和功耗的负担,因此通过设计电路,将线圈的感应电动势作为参考信号处理后,并通过一定的比例公式将干扰信号抵消掉,有效地将干扰和有用信号进行了隔离,同时对信号进行小数量级的放大。图6所示为抵消干扰信号的示意图。

图6 抵消干扰信号示意图Fig.6 Diagram of counteracting interference signal
4 Multisim仿真结果
我国某些地区的海水切割磁感线产生电动势的信号为纳伏级,所以传感器需要采集处理的信号为纳伏级。假设1 cm/s的海流在20°N海域所感生的电场在电极距离为5 cm的海流电场传感器上产生的电压差大约是20 nV左右,所以在仿真中假设采集到的信号为20 nV。
按照电路设计流程,首先设计了滤除50 Hz工频滤波器,通过Multisim软件仿真结果,可以在模拟波特测试仪中看到滤波效果。输入信号可以看成近似正弦波信号,图4b中可以看到在50 Hz中心频率处出现带阻滤波现象,其他频段幅频特性曲线平稳,并且阻带带宽非常窄,接近1 Hz。
为获得更高的放大倍数和功率输出,此设计采用三级放大电路。分别进行了前置放大,补偿式放大和主放大三部分。传感器需要采集的电极感生电压为20 nV,但是在下沉过程中产生的感生电场信号大约为7.3 μV,即实际采集到的信号有7.32 μV。该信号经过前置放大后,通过设计补偿电路,加入补偿信号,对强干扰信号7.3 μV进行了抵消,只剩下20 nV经过放大后的信号,约5.8 mV,实现了纳伏级信号到毫伏级信号的放大目标。对整个放大电路进行仿真,输入一个幅值为7.32 μV的正弦信号,经补偿并放大后输出波形如图7所示(振幅较小的为输入信号,振幅大的为输出信号),可以满足本次设计对信号的放大要求,使信号扩大到毫伏级,便于使用示波器观察。
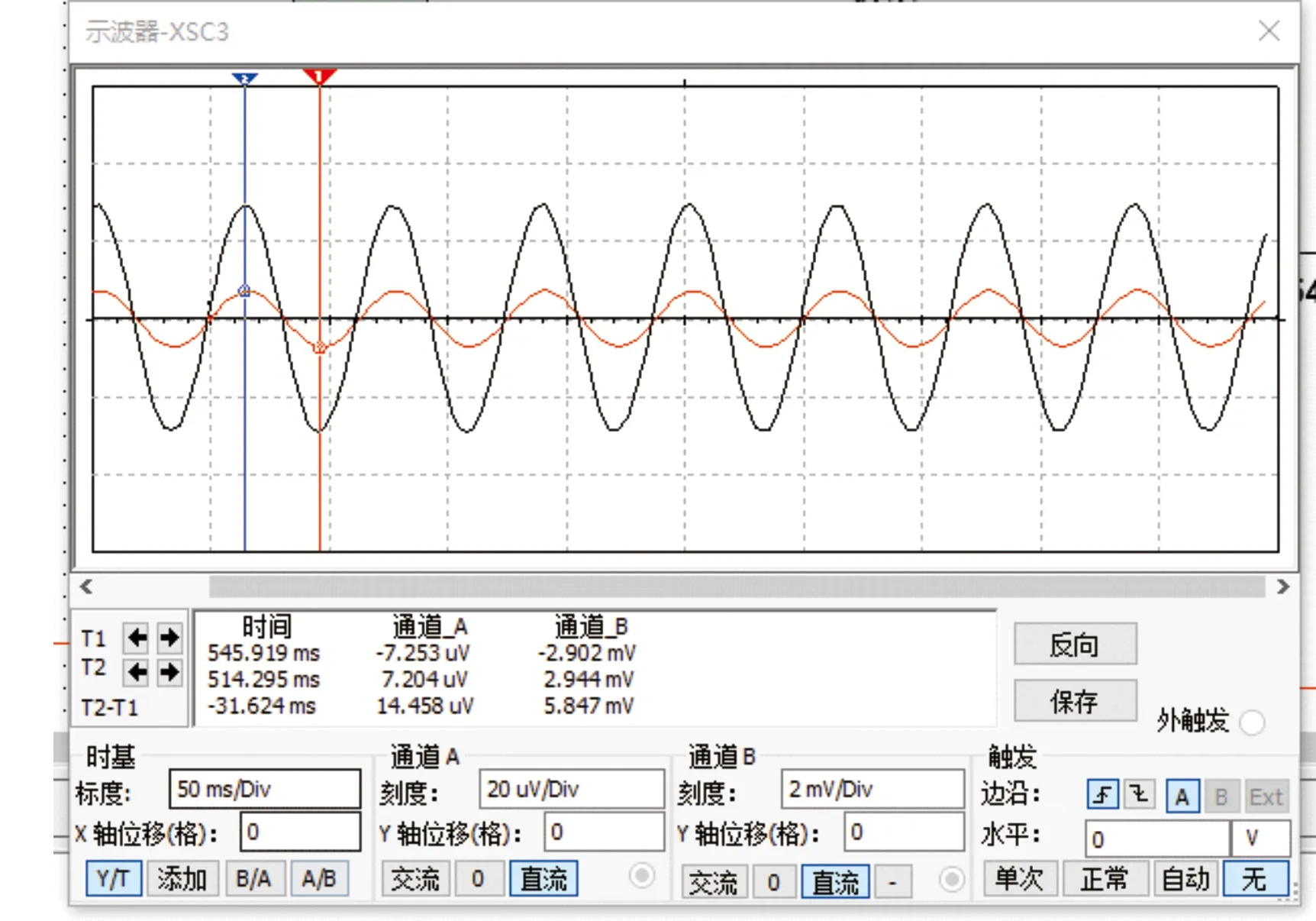
图7 放大倍数仿真Fig.7 Magnification simulation
由于海底噪声干扰较大,为将有效信号频移到海流电场传感器的超低噪声频段,所以设计最初将信号调制到较低频率。此时,信号需通过带通滤波电路,将所需的低频信号过滤出来。
5 结语
海流信号传感器在海水中采集到的信号为极为微弱的纳伏级信号,并且非常容易被噪声淹没。通过将有用信号频移到海底噪声较低的频段,大大降低了采集信号中混入的海底高频噪声。同时使用补偿式放大电路,对信号进行多级放大,降低了传感器及其电极自身所带来的干扰噪声,提高了采集信号的质量。最后利用Multisim仿真软件对电路进行仿真,提高了设计的可靠性,同时也证明了所设计电路的可行性,满足了课题研究的技术要求,对海流信号采集及处理研究具有重要意义。