无人机倾斜航空摄影监测崩岗侵蚀量变化的方法
2019-02-21周小荃余宏亮魏玉杰蔡崇法
周小荃,余宏亮,魏玉杰,胡 节,蔡崇法 ※
(1.华中农业大学资源与环境学院,武汉 430070;2.农业部长江中下游耕地保育重点实验室,武汉 430070;3.湖北省电力勘测设计院有限公司,武汉 430040)
0 引 言
崩岗是指在水力和重力的综合作用下,山坡土石体受破坏而崩塌和受冲刷的侵蚀现象[1]。崩岗主要由崩壁,崩积堆和洪(冲)积扇组成[2],崩岗侵蚀复杂多变,包含重力崩塌、雨滴击溅、片流冲刷、径流侵蚀等多种形式[3],所以对崩岗侵蚀量的精确监测对研究崩岗的发生与发育机理有着重要意义。然而崩岗流域地貌具有深沟陡坡,形态复杂多变,且存在其特有的掏蚀现象[4],使得监测崩岗的侵蚀量变化十分困难。因此,目前对崩岗侵蚀量监测的研究非常少。1
在侵蚀地貌的监测中,研究人员尝试将测绘仪器和设备应用于量化侵蚀过程,通过获取同一区域不同时期重复的地形测量数据,生成多时相的数字高程模型(DEM),并建立相应的算法用以模拟侵蚀过程、估算侵蚀量和预测地形环境变化[5-6]。根据获取地形数据方式的不同,可将现有的监测质量运移的方法分为3 种:基于全球定位系统(GPS)[7]地形测量法、数字航空摄影测量法(DAP)和三维激光扫描法[8]。在崩岗侵蚀监测中,单点GPS 测量可用于获得精确的参考数据或者有限区域的地形信息,这种方法可以保证单点精度,但形成DEM 的分辨率很低[7]。三维激光扫描法可以获得精度极高的点云数据,现有的技术已经可以达到毫米级的位移监测[9],但设备价格昂贵且仪器庞大沉重,需要固定且平稳的观测点,在野外工作中十分不便于使用,同时点云数据会受地形和植被等遮挡影响,形成扫描死角从而产生点云空洞,使用时多站点大量的点云数据拼接难度较大、耗时费力[10]。相反,航空摄影可以快速、连续地覆盖大尺度的区域,获取高分辨率的正射影像[11],但是样本密度不足,无法到达精度,且容易被植被和地形因素影响[12]。
近年来,无人机(unmanned aerial vehicle, UAV)航空摄影测量[13]作为一项测绘新技术,使得地形数据的获取快捷方便,监测范围更大效率更高,现在已经被广泛地运用在了很多需要实景三维建模的领域[14-15],在崩岗侵蚀方面也开始萌芽[16],但是在崩岗崩壁崩塌侵蚀量监测方面运用并不成熟。运用在崩岗侵蚀监测中的优势是:1)无人机可以贴近崩壁、沟道等人为无法靠近的区域飞行,从而获取全方位、多角度的影像信息,避免视野盲区,解决崩壁崩塌侵蚀数据无法测算的问题,获取完整的地形信息甚至细节纹理[17];2)影像经过同名点匹配生成的点云数据量远小于三维激光扫描法获取的数据量,因而数据处理、分析更加易于操作;3)相比三维激光扫描仪,无人机价格便宜、易于携带,更适合野外测量。
本文对研究区崩岗进行低空倾斜摄影获取多角度航空影像,通过空三加密处理生成目标崩岗崩壁和崩积堆的三维点云模型。为了达到最优效果,得到更多有用的描述侵蚀过程的数据,使用了两种方法配合使用来测算崩岗侵蚀量和提取崩岗的空间数据,分析在监测周期内崩岗侵蚀的变化规律;最后使用三维激光扫描仪与无人机同期实测目标崩岗作为参考数据验证精度。克服航空及传统测量无法对垂直崖壁进行定量描述的限制,为崩岗侵蚀量定量研究提供比三维激光扫描更简单快捷的方法,使深入研究崩岗侵蚀成因机理成为可能[18]。
1 材料与方法
1.1 研究区概况
试验监测崩岗位于湖北省咸宁市通城县五里镇程凤村(113°43'26"E,29°12'18"N),属于北亚热带季风气候区,年平均气温15.5~16.7 ℃,雨季集中在4—8 月,年平均降水量1 450~1 600 mm。该崩岗为活动型崩岗,崩壁向分水岭侵蚀后退仍在进行中,具有典型瓢形崩岗的各种特征,土壤类型为棕红壤,崩岗内部植被稀少。
1.2 数据获取
1.2.1 控制点的布设与选取
在目标崩岗内采用大地坐标系布设控制点,首次测量前使用Trimble R4 GNSS 差分GPS 布设控制网,为避免崩岗快速侵蚀对控制点坐标的影响,共布设10 个控制点(理论上每平方千米3 个控制点即可实现坐标定位),选择了崩岗附近监测室的4 个角点和崩壁、崩积堆打入六根1 m 长的铁杆并留出0.3 m 的高度,作为固定点位的控制点。
1.2.2 无人机数据的获取
数据采集的时间为2018 年6 月到9 月雨季期间,在每月选择天气晴朗、风力较小的时间段进行。无人机型号为大疆精灵4pro 准专业无人机,该机型自带的1 英寸2 000 万像素CMOS 影像传感器与云台集成,配有主、副 2 个遥控器云台,可控转动范围为俯仰-90°至+30°可实现全方位的崩岗监测,无人机及相机的基本参数如表 1 所示。
表1 无人机及相机的基本参数 Table 1 Basic parameters of UAV and camera
在目标崩岗操控无人机如图1 所示,从距离集水区顶部20 m 处开始操控云台,在垂直方向上以-10°、-30°、-50°、-70°、-90°,这5 个固定角度,水平方向上360°进行环形全景拍摄,在一个高度拍摄完毕之后降低5 m 再次进行同样操作;当无人机降低到崩岗集水区高度以下时,操控云台在垂直方向改为+10°、-10°、-30°、-50°、-70°、-90°这6 个固定角度。从而在每一个高度都能获得崩壁的完整影像数据,以确保获取目标崩岗不同位置和不同角度的影像,根据具体地形的不同可以变化拍摄方法,本次实验最高高度为高于集水区20 m 处,最低高度为距离沟底5 m 处。若崩岗有很深的侵蚀沟,则操控无人机时需缓慢向沟谷内移动并重复以上操作,移动过程中也要进行拍摄。在操作过程中确保在同一高度采集的相邻影像重叠率超过90%,不同高度采集的影像重叠率超过 60%,在保证安全距离的情况下按照以上操作进行近距摄影,从而获取崩岗全部影像信息。

图1 无人机倾斜摄影示意图 Fig.1 Diagram of UAV oblique photography
依照此方案,对目标崩岗在2018 年6 月15 日,2018年7 月4 日,2018 年8 月1 日,2018 年8 月13 日,2018 年9 月30 日进行了5 次无人机摄影。
1.2.3 参考数据的获取
依据刘希林等[19]提出的方法, 利用 Z+F IMAGER5006h 三维激光扫描仪与无人机同期使用如图2所示,同时获取崩岗高精度点云数据作为参考。测量的关键步骤如下:

图2 三维激光扫描仪测量目标崩岗 Fig.2 Laser scanner for measuring Benggang of target
1) 控制点布设。使用与采集无人机数据一致的控制点。
2)数据拼接与配准。将目标崩岗分为2 站测量,再利用海联达三维软件进行多站点拼接,并使用控制点和标靶的大地坐标对仪器内置坐标进行转换,将所有点云数据统一在真实大地坐标系下,以实现不同站点点云数据的拼接和不同时期点云数据的配准。
3)体积的计算。为了达到能够作为参考数据的毫米级精度,不抽希点云,通过Arcgis10.0 的3D 分析模块,采样密度大,使用LAS 数据集转TIN(不规则三角网)形成表面。使用ArcGIS 三维分析模块中的 Area and Volume 工具能够计算出TIN 表面到任意高程水平面垂直投影下的不规则立柱体的体积。本文以程凤崩岗最低点主沟沟口高程为底层,从崩岗表面向下作垂直投影形成不规则立柱体,计算前后两次立柱体的体积之差,即为崩岗侵蚀或沉积量。
1.3 研究方法
如图3 所示,本文对无人机获取的影像数据运用Photoscan 进行空三加密处理,生成目标崩岗的三维点云模型;运用SOR 去噪法和人工手动去除植被影响,得到崩壁和崩积堆的完整点云模型;利用点云模型生成数字地形模型(DTM),提取崩岗地形信息,运用多时相连续DEM 相减获得DOD(Difference of DEMs),从而获取监测周期内崩岗连续的侵蚀沉积动态变化并找到侵蚀严重的部位,再使用2.5D 体积测算方法来细化侵蚀严重的崩壁和沟头部位的侵蚀量作为补充,最终获得监测期内的总侵蚀/沉积量。并以三维激光扫描仪得到崩岗侵蚀体积数据作为参考值,对崩岗的侵蚀与沉积量测算结果进行精度检验,分析在监测周期内短期崩岗侵蚀过程。

图3 无人机数据监测崩岗侵蚀过程技术路线图 Fig.3 Technical roadmap of UAV data monitoring collapse erosion process
1.3.1 无人机数据处理
以Photoscan 1.2.5 摄影测量软件为工具,分别对同一目标崩岗5 期影像数据进行处理。以2018 年6 月15 日的崩岗拍摄影像为例对主要处理步骤进行如下说明:
1) 空三加密
导入影像数据和控制点数据,将参考系设置为WGS-84 坐标系,再导入相机校验参数文件完成属性设置。通过Photoscan 软件对所有照片进行空三加密处理,软件自动恢复每每张影像片的方位姿态[20]。
2) 点云生成
经过多次试验尝试,为了避免数据量过大噪点过多而导致实验数据处理困难,最终确定将点云生成的“图像比例”参数设置为“1/2”,“匹配最低数值”设置为“3”,“点密度”设置为“中等”。
3) 点云去噪与输出
利用观察法人工手动框选的方式将生成的点云数据中植被、天空、建筑等多余噪声点删除进行初步去噪,再使用SOR(statistical outlier removal)去噪法精细去除相机拍摄产生的噪点,最后输出目标崩岗的三维点云模型图4a,去噪后的正视图、俯视图、斜视图如图4b-4d所示。以LAS1.2 格式对包含坐标和颜色信息的点云成果进行输出,LAS 格式便于使用 CloudCompare 和Arcgis10.4.1 进行多时相点云模型对齐和地形数据提取分析。2018 年6 月15 日的拍摄影像建立的崩岗三维点云模型成果的点云数为14 419 534 个,去噪后只留下崩岗区的点云数为7 419 534 个。

图4 崩岗三维点云模型 Fig.4 3D point cloud model of Benggang
4) 不同时期点云对齐
由于测算侵蚀量需要不同时期数据的对比,将导出的不同时期点云模型的LAS 文件导入CloudCompare 软件中,利用CloudCompare 软件的对齐拼接工具手动选择已经标定的控制点进行点云配准,使用点与点的距离工具来判定两期点云的复现性,得到平均均方根误差为0.000 37 m,可以达到监测崩岗侵蚀要求。
1.3.2 侵蚀量测算方法
计算崩岗侵蚀量的思路是将后一时期的点云数据或栅格数据与前一时期的进行对比,计算点云模型差值的体积。沉积是侵蚀土体在监测期间没有被运移出崩岗地貌而形成,所以最终得到的正值为沉积的体积量而负值为侵蚀的体积量,两者相加得到在监测周期内目标崩岗范围中总共的侵蚀或沉积量。
1) 基于多时相DEM 差分方法
依据文献[21]曾用方法来计算。多期地形数据中的变化通过创建一个DEM 差值(DOD)来计算。以高程值作为每一个栅格的计算标准,用每一个栅格高程的差值ZΔ 与栅格大小的乘积表示体积量的变化。总的体积变化 0VΔ 计算为[22]

式中AV为参与计算的总面积(m2);为在栅格(i,j)处的高程变化(m);n 为在总面积AV中的栅格总数。
2)基于点云2.5D 体积测量法
运用三维点云数据计算体积是很难实现的,因为如何定义物体的边界是很难解决的问题,一种方法是提取三维点云的凸壳(包络体),然后再进行计算。但是在点云存在孔、洞的情况下提取和计算就变得十分复杂,所以将点云降维成2.5D 即平面的函数值计算体积。
本文将引入一种基于开源点云处理软件cloudcompare 的2.5D 体积算法解决崩壁陡坡上崩塌侵蚀和坡脚掏蚀无法计算的问题,将2.5D 点云底面划分成离散的网格如图5 所示,计算每个网格对应顶面点云单元的体积并相加求和得到 VΔ 计算方程为

式中S 为网格划分步长step(m2);ΔH 为两期点云中从定义的底面点云到顶面点云在设定方向上的距离(m)。
图5 点云2.5D 体积计算模型 Fig.5 Point cloud 2.5D volume calculation Model
式中V 为1 个监测周期内的总侵蚀/沉积量。
3)不确定度计算
数字高程模型(DEM)的不确定性因素取决于点云、点密度、表面复杂性和插值方法的准确性,这些不确定因素都会对DEM 的精度产生影响,而DOD 是计算两组DEM 数据的差值,所以需要考虑DEM 的不确定性并进行误差分析才能得到可靠地结果。
通常情况下通过平差得到的控制点的总均方根误差用来评估转换误差数值[23]。由两组DEM 将不确定度传播到DOD 中的共同误差估算公式如下[24]:

在地貌分析领域关于DOD 不确定性阈值估算的研究已有较为成熟的研究,根据本试验的特点选用最低等级的检测方法(LODmin),即假定DOD 不能准确的计算高程范围在- LODmin~+ LODmin之间的土体变化,该范围内有许多不正确的高程变异点,在最终的计算结果中删去。在本次试验中设定[25]。

4)泥沙量的计算
将得到的侵蚀体积根据不同部位不同的容重进行产沙量的计算,公式如下[26]:

式中SP 为产沙量(kg),ED 为高程差之和(m),GR 为栅格分辨率(m),Bd=沉积体或侵蚀体的容重(kg/m3),V为侵蚀或沉积的总量(m3)。
2 结果与分析
5 次飞行任务后采集的影像结果如下表2 所示。每次采集的影像在300 张左右,图像校准成功率接近100%。地面分辨率最优可以达到0.016 5 m 到达厘米级。地面控制点在所有图像中都至少有2 个可以标记。5 组地面控制点的平均重投影误差为0.00 679 m,总均方根误差的平均值为29.46 mm。根据式(3)将总均方根误差的平均值带入每期DEM 中计算得出LODmin为42 mm。

表2 拍摄影像的基本信息 Table 2 Basic information on photographing images
2.1 崩岗数字地形模型的构建与地形信息的提取
地形因素是影响崩岗侵蚀的关键因素,崩岗侵蚀发生的方式与速率都与之相关,也是崩岗发育过程的重要判断依据[27]。本文将已经对齐的不同时期的崩岗点云LAS 文件导入Arcgis,使用3D Analyst 模块下的LAS 转多点要素,再使用反距离权重法构建分辨率为1 cm 的DTM 栅格,由于获得的点云数量足够多,该方法可以快速便捷的得出高精度栅格。以2018 年6 月15 日测量数据为例,将DTM 输出为DEM并生成等高线(图6a),通过Spatial Analyst 工具提取坡度,坡向和汇流信息(图6b~6d)),实现对崩岗地形的量化分析。计算得出,崩岗高程在246.782~261.604 m 相对高差14.822 m,崩岗壁高13.55 m,平均深度20 m,崩口宽1.8 m,崩壁沿线内部面积236.52 m2属小型崩岗。5 条切沟呈爪状分布侵蚀主沟1 条,沟道长12.45 m,沟道平均宽度1.14 m。由于崩岗较小且陡峭,坡度大于60°近乎直立的崩壁面积占总面积的33.35%,坡度大于25°的陡坡面积占85.7%。
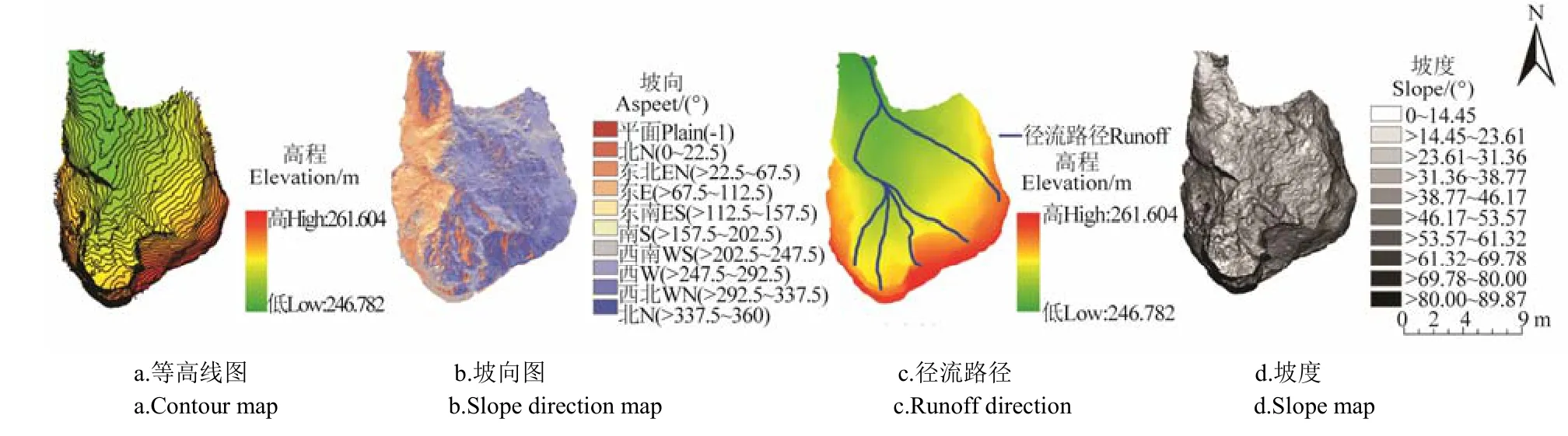
图6 地形信息图 Fig.6 Topographic information map
2.2 崩岗侵蚀量的测算与分析
1)多时相DEM 差值
运用Arcgis 栅格计算器将前一期的表面DEM 从后一期的表面DEM 中减去建立DOD 图,利用栅格计算器的编程工具相应的编写代码使DOD 计算时忽略最小阈值±LODmin,从图7 中可直观的看出崩岗侵蚀强度的空间分布,绿色正值表示沉积区域,而红色负值表示侵蚀区域。运用Arcgis 的Spatial Analyst 工具的填挖方功能如式(1)计算崩岗整体侵蚀量 0VΔ 见表3。
由图7 可知,研究区崩岗的主要侵蚀形式为沟道下切,最强烈的侵蚀区发生在沟道旁崩壁的坡脚处,可以很清楚地看出2018-07-04 至2018-08-01 崩壁土体崩落散落在沟道内形成沉积,2018-08-13 至2018-09-30 由于沟道深切沟道两侧的土体失稳向沟道内部垮塌。
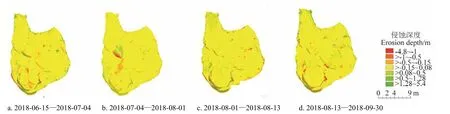
图7 DODLOD 侵蚀量计算图 Fig.7 Calculation of erosion amount of DODLOD
但是在崩岗这种特殊的侵蚀地貌中崩壁陡峭而且由于淘蚀作用向内凹[4],如图8 所示在地形坡度大于45°的区域,由于X、Y 方向的微小的水平误差,会造成X/S(其中S 为坡度)出现超过1 m 的垂直误差[28],本研究中受崩壁上层悬挂土体凸出影响,计算会出现超过4 m 的误差(图7a~图7d 中左下角的红绿斑点处),而在未发生崩塌的崩壁上这种规模的实际变化是不可能的,并且在实际发生崩塌的区域由于坡脚土体受水蚀影响向壁内凹陷,如果用高程差来计算体积的话就会使计算的侵蚀量偏大,所以为了准确计算需要在DEM中将这些部位删去。
所以本文使用CloudCompare 软件根据图7 将主要发生侵蚀的沟头处和左侧壁分别分割出来,并且使用2.5D体积计算功能来测算壁侵蚀的体积为DOD 数据做重要的补充,如图8 所示分割后的点云模型包括全部的崩积堆和部分崩壁,使用DOD 法制作侵蚀量分布图重新计算侵蚀量,记录为ΔV1见表3。
如图8b~图8e 所示分割后的DOD 图能更加清晰和精确的监测崩岗侵蚀过程的变化,2018-07-04—2018-08-01 崩积堆发生了坡面侵蚀也可以清晰的看出,2018-06—15—2018-07-04 时期开始沟道不断的下切侵蚀直到2018-08-13—2018-09-30 监测期间沟道侧壁发生了崩塌现象,崩落的土体在沟道内堆积。
2)基于点云2.5D 体积测量崩壁侵蚀体积
将崩壁方向定义为底面进行点云2.5d 体积测量,运用 CloudCompare 软件在体积计算界面中定义地面(Ground)及顶面(Ceil):这里后一期点云选为常量,值为0;顶面选为前一期点云,空单元(不包含数据点)不参与体积计算,这里将其选为leave empty,本文选择0.01step 即1cm 的单元。本试验侧壁崩塌现象发生在2018-07-04—2018-08-01 之间(图9a~9a b),沟头溯源侵蚀在2018-0813 到2018-09-30 之间比较明显(图9c~图d),最终可以达到很好的可视化效果,红色正值表示侵蚀区域,蓝色负值表示沉积区域(在计算时设侵蚀为负沉积为正),体积测算方式如公式(2),如图9b 只分割出了发生崩塌的侧壁侵蚀量记为ΔV2,图9d 为沟头处坡度大于80°的陡坡侵蚀量记为ΔV3 结果见表3。

图8 分割后的点云模型与分割后的侵蚀分布图 Fig.8 Segmented point cloud model and DOD

表3 侵蚀量计算结果 Table 3 Erosion calculation results

图9 2.5D 体积侵蚀量图 Fig 9 2.5D volume erosion chart
3)总侵蚀和泥沙量的计算
根据以往的研究[29]得知目标崩岗崩壁不同层次土体的容重和崩积堆的土体容重得到平均干容重为1.37 g/cm3。将ΔV1、ΔV2、ΔV3相加得到最终的总侵蚀量V,再将V 代入式(4)进行计算得到每个监测周期侵蚀/沉积的总泥沙量见表3,最终得到该崩岗在监测期2018-06-15—2018-09-30期间近4 个月流失的总泥沙量为5356.289 kg。
4)监测期内崩岗侵蚀过程
降雨是崩岗侵蚀的主要驱动力[30],为进一步分析崩岗侵蚀过程与降雨量的关系,本次试验获取了武汉立方在通城程凤村监测的降雨量数据如表4。
由表4 可知崩塌侵蚀量相对较小,所以侵蚀量的主要来源是崩积堆,而崩积堆土体松散所以受降雨的影响很大,但是降雨量最多的监测时段却不是侵蚀量最大的 时段,造成这种现象的原因是连续的降雨发生在6 月30日到7 月8 日之间,前一时期的大量降雨使土体含水率增大更易侵蚀[31],在连续降雨的条件下土壤抗侵蚀能力有先增大后减小的趋势[32],所以在图8 中可以明显看出后一监测期发生了更严重的侵蚀现象。在2018-06-15—2018-07-04 监测期内的降雨量是最大的,发生了一次降雨量大于80 mm 的大暴雨,由图8b-图8d 所示监测期内主要的侵蚀形式是水力侵蚀为主的沟道下切加深,主要发生区域为沟道内部,其他部位距离沟道越远侵蚀强度逐渐减弱,崩积堆发生坡面片状侵蚀,崩壁只发生了少量的剥落;而在2018-07-04—2018-08-01 期间崩壁发生大量崩塌,崩落的土体散落在沟道上形成沉积,崩塌由于沟道受径流影响侧蚀加宽侵蚀坡脚使崩壁达到崩塌的条件最终形成,说明崩壁崩塌事件与降雨量没有固定的关系;2018-08-01—2018-08-13 的总侵蚀量值为沉积,因为这个监测周期相对较短且期间总降雨量为22 mm 所以几乎没有侵蚀发生,但是在之前崩落的土体在崩岗系统内移动造成了一些体积变化,这说明短期监测很难发现规律性,只能作为长期监测的有效补充[28];由图9d 可知2018-08-13—2018-09-30 期间沟头后退发生在崩壁的跌水口处和跛脚处,这是由于集水区径流从崩壁跌水口冲出发生溯源侵蚀,沿崩壁向下冲刷坡脚形成淘蚀现象,且由图8e 可以看出坡脚处沟道的侧壁发生了崩塌现象。

表4 降雨量与侵蚀量数据对照表 Table 4 Rainfall and erosion data comparison
所以在监测周期2018-06-15—2018-09-30 内,目标崩岗先以水力侵蚀为主,沟道和崩积堆为主要侵蚀部位;到达崩塌临界条件后坡脚处发生了重力侵蚀崩塌;之后又以水力侵蚀为主,发生侵蚀的部位都在沟道附近,沟头处的溯源侵蚀量随着崩岗侵蚀的发育持续增加,沟道侧的坡脚再次发生崩塌,可见崩岗侵蚀是一个水力侵蚀与重力侵蚀交替发生的侵蚀地貌,这种循环导致了崩岗侵蚀的发育。
2.3 测算结果精度检验
以三维激光扫描仪实测获取的试验崩岗的三维点云为基础,根据文献[10]的方法如1.22 所述将精度调整至0.01m的TIN 栅格获得TIN 表面,分别求得 5 次监测日期崩岗体积的实测值分别为929.875 2,928.922 5,925.985,926.960 6,925.706 4 m3,将前后两期体积差作为监测期内的总侵蚀或沉积量体积,以此为参考值,对本文方法测算崩岗侵蚀/沉积体积的结果进行精度检验,结果如表5 所示。

表5 崩岗侵蚀量计算值精度 Table 5 Accuracy of calculation value of erosion amount of Benggang
由表5 知,用三维激光扫描仪测量后使用TIN 构建投影面体积法测算的侵蚀量参考值与本试验的测算值相差很小,相对误差在5.58%~14.71%的范围内,绝对误差在0.053 2~0.3033 m3之间在年侵蚀量巨大的崩岗地貌中具有很好的准确度,说明无人机低空倾斜航空摄影监测能够准确计算出崩岗侵蚀量。
3 讨 论
以往在对崩岗侵蚀的监测中,排桩法和在流域出口修建谷坊监测泥沙的方法都无法对崩壁地形进行局部监测,且精度很低;地面近景摄影测量需要永久固定摄影位置而在侵蚀剧烈的崩岗地貌中很难完成且只能固定局部范围进行监测;航空遥感监测周期长适用的尺度很大,而崩岗侵蚀的面积小而且分散,难以满足精细的研究要求;GPS 测量技术需要人工到达很多危险的地形,且在崩岗中测量卫星信号难以保证精度。三维激光扫描作为近年来的创新测量技术,具有高精度,穿透性,扫描速度快等特点能很准确的获得点云数据、但是仪器价格高昂不方便携带,在崩岗中有很多深沟使其会有很多扫描死角,且多站点的视角在拼接和配准时不易操作。
本文使用的无人机倾斜航空摄影测量方法,不仅价格低廉而且空中视角可以全方位的获取崩岗地形点云数据,获取数据速度更快,在崩岗这种小尺度的侵蚀地貌监测中会有广阔的应用前景和实际的使用价值。但是,在操作中对控制点的要求很高否则很难生成高精度的点云数据,且飞行时需要手动操控拍照容易出现影像数据获取质量不高的情况,目前只以单体面积较小的崩岗作为研究对象。在点云的处理方法上,本文使用的方法较为复杂但是能够很精细的测算出崩岗局部的侵蚀情况,然而如果使用在大型崩岗上时就会显得繁琐复杂很难定义侵蚀与沉积,所以如何实践对结构更为复杂的大型崩岗的三维点云建模并提高侵蚀量测算精细度,有待进一步研究。
4 结 论
本文将基于无人机倾斜航空影像建立三维点云模型测算侵蚀量的方法运用在了崩岗侵蚀方面并确定了其适用性和点云数据处理方法。该方法以消费级多旋翼无人机搭载普通数码相机获取目标崩岗的多角度倾斜航空影像为基础,根据倾斜摄影测量原理对影像进行空三加密处理,生成点云模型的平均总均方根误差仅为0.042 m 达到厘米级测量,再使用Arcgis 提取崩岗地形信息,基于点云模型运用多时相DEM 差分法和点云2.5D 体积算法两种方法配合测算崩岗侵蚀量,监测崩岗不同部位的侵蚀量动态变化,并对结果进行精度检验。4 个周期的崩岗侵蚀量计算的平均相对误差为9.69%,但在崩岗这个尺度的侵蚀地貌中绝对误差最大值仅为0.3033 m3。利用无人机倾斜航空摄影监测崩岗侵蚀沉积量的动态变化是有效且便捷的方法。
