悬挂振动式油茶果采摘执行机构设计与试验
2019-02-21高自成赵凯杰李立君庞国友王晓晨
高自成,赵凯杰,李立君,庞国友,王晓晨
(中南林业科技大学机电工程学院,长沙 410004)
0 引 言
油茶树是中国特有的木本食用油料树种 , 也是世界四大木本油料植物之一[1]。近年来,中国油茶产业迅速发展,据国家林业局统计,中国的油茶产量已经从2008 年的20 多万t 增加到了2012 年的45 万t,产值由110 亿元增加到了390 亿元[2]。油茶果采摘集中在每年的秋季农历寒露和霜降两个节气,10 月中旬,采摘期短,而目前油茶果的采摘主要还是依靠人工手动采摘,劳动强度大,作业效率低,往往错过最佳的采收时间,严重制约了油茶产业的健康发展[3-4]。中国对林果机械化收获的研究起步较晚,理论研究不完善,因此,对林果机械化收获理论研究以及研制实用、高效的林果采收机具有重要意义。
国外对于采摘机械的研究开展较早,研究表明通过对果树施加振动的采摘方式效果最好[5]。国外许多学者对果树采摘振动理论进行了研究,Horvath 等建立了果树树干-侧枝有限元模型,对果树在底部受到激励时进行了响应分析[6],同时Láng 等对樱桃等果树进行了采摘理论研究和试验[7-9],国内在这方面的研究起步较晚,国内进行 采摘机械的研究起步较晚,采摘技术和手段比较落后[10]。王业成等设计了黑加仑采收机,并进行了参数优化[11-12]。王长勤等针对矮化密植性果树研制了偏心式林果振动采摘机,试验表明:采摘频率为19~20Hz 时,采净率约89.5%~92.6%,效果较好[13];散鋆龙等研究了不同振动方式和频率对杏树振动采收的影响,得到杏树在11.5 Hz 时,各检测点的加速度最大[14];杜小强等对樱桃树在不同激振力下的响应进行了研究,同时对拽拉式采摘器进行了研究[15-18]。
上述采摘机械,激振机构和车体多是刚性连接,工作过程中,振动对采摘车上的电控设备以及驾驶员造成一定程度的影响[19]。因此,本文在深入研究油茶果振动采摘机工作方式的基础上,提出了一种悬挂振动式油茶果采摘执行机构。
1 悬挂振动式采摘执行机构设计和原理
1.1 结构组成
悬挂振动式油茶果采摘执行机构依附采摘机底盘组件进行工作,其基本结构如图1 所示。该机构主要由振动头1 和立柱机构3 组成。立柱机构3 固定在采摘机底盘2 上,由竖杆和横杆以及一些滑轮组成,通过齿轮机构实现圆周转动。升降液压缸固定在立柱机构4 上,利用绳索5 以及滑轮和振动头1 连接,实现振动头的上下运动。采摘机的主要作业参数如表1 所示。

图1 悬挂振动式油茶果采摘执行机构结构图 Fig.1 Structure diagram of suspended and vibratory Camellia Oleifera fruit picking actuator

表1 采摘机主要作业参数 Table1 Main operating parameters of picking machine
1.2 工作原理及过程
悬挂振动式油茶果采摘执行机构是基于通过对果树主干施加机械振动,使果树产生受迫振动,果树带动果实做加速运动,果实运动产生的惯性力大于果实与树枝的结合力时,果实从果树上掉落。工作时,首先将立柱机构4 旋转合适的角度,通过升降液压缸3 带动振动头1到适当的高度,然后通过振动头的夹持机构夹紧树干,启动振动头上面的液压马达带动偏心块转动,从而产生激振力,通过振动头将力传递给树干,从而使果实产生一定频率和振幅的受迫振动。
2 关键部件设计
2.1 振动头设计
振动头是悬挂振动式油茶果采摘执行机构的核心部件,其主要功能为产生激振力和夹紧树干,主要由激振机构、连接杆、夹紧液压缸等组成。根据实地测量成熟油茶树直径范围25~45 mm,此次设计液压缸行程范围为0~150 mm。振动头结构如图2 所示。
激振机构采用双偏心块式结构,主要由液压马达、偏心块、齿轮、传递轴、振动箱体等组成。2 个偏心块对称装配,转向相反,这样在旋转过程中,只能产生一个方向的惯性力,另一个方向惯性力被抵消。为了使结构紧凑,采用1 个液压马达带动1 对齿轮传动,使2 个偏心块转向相反,其主要结构如图3 所示。

图2 振动头结构图 Fig.2 Structure diagram of vibratory head

图3 激振机构结构图 Fig.3 Structure diagram of excitation mechanism
2.2 偏心矩计算
激振机构使果树产生振动,由于振动机械的阻尼力和弹性力远远小于机体的惯性力和激振力,所以它对机体运动的影响可忽略不计,这时,振动系统产生的惯性力和偏心块产生的惯性力相平衡,方向相反[20],即2mω2r=Mω2B,其中m 为偏心块质量,kg;r 为偏心块偏心距,mm; ω 为偏心块转动的角速度,rad/s;M 为果树等效质量,kg;B 为树干振幅,mm。
为初步得到偏心块的偏心距,需要测得不同高度下油茶果树的等效质量。Láng 等利用瑞利法估算果树的等效质量[21],本项目组对油茶采摘进行了很多的研究,其中包括对油茶树的等效质量进行测量,测量地点为长沙市中南林业科技大学雪峰山油茶基地,测量对象是7 a 生油茶树,该地的油茶树主干直径范围为25~45 mm,普遍集中在28~36 mm,根据当地油茶果树的生长特点,选取基地内27 棵直径在28~36 mm、处于结果期的油茶树,取不同高度测量油茶树的等效质量[22],求其平均值,结果如表2 所示。

表2 油茶树等效质量 Table 2 Equivalent mass parameter of Camellia Oleifera tree
根据油茶果树的生长情况可知,油茶果主要生长在1 300 mm 高度以上的侧枝上,根据预试验,在夹持高度为1 300 mm、树干全振幅约为15 mm 时,采摘效果较好,因此果树等效质量按照约135 kg 计算,振动头连带偏心块质量初步按照45 kg 设计。根据上式估算得到偏心块的偏心矩为0.67 kg·m。
3 采收动力学模型
在工作过程中,振动头和油茶果树刚性连接,可将油茶果树和振动头视为一个整体。由于绳索摆动幅度很小,对整体影响很小,故在进行动力学建模时将其忽略。油茶果树力学特性用等效为弹性系数和阻尼系数表示[23],将模型简化为单自由度质量-弹簧-阻尼振动系统。在水平方向上,以油茶果树夹持位置中心o 为原点坐标系,以果树水平运动方向为x 坐标,建立油茶果树-振动头动力学模型,如图4 所示。采收过程中,瞬时合力为0。

图4 油茶树-振动头动力学模型 Fig.4 Dynamic model of Camellia Oleifera tree-vibratory head
根据牛顿定律,建立系统的振动微分方程。此时作用在系统上的力有:
偏心块的偏心力

因悬挂振动式油茶果采摘执行机构采用双偏心块式结构,2 个偏心块对称布置,转向相反,故在工作过程中,x方向产生的偏心力大小相等方向相同,y 方向上产生的力大小相等,方向相反,相互抵消合力为0。故2 个偏心块产生的惯性力只在x 方向上有。
振动头惯性力

式中fx为偏心块在x 方向上产生的偏心力,N;f1x为振动头在x 方向产生的惯性力,N;f2x为果树在x 方向的惯性力,N; x 为树干在x 方向的位移,m。
果树惯性力

弹性力

阻尼力

根据牛顿第二定律可得系统振动方程为
整理后可得

式中M 为系统的总质量,M=M1+M2,kg。
根据机械振动理论,上式的稳态解为:

式中B 为x 方向稳态响应的振幅,ψ 为位移落后于激振力的相位角。将式(8)及其一阶和二阶导数带入式(1),得到:

由以上计算过程和结果可看出,在果树受到简谐激振力作用时,果树的受迫振动也是一个简谐振动,且沿着x方向的往复直线运动,其频率和激振频率ω 相同,振幅B、相位角ψ 取决于系统本身的性质(质量M2、弹性系数k、等效阻尼系数c)和激振力的性质,与初始条件无关。
4 振动采摘系统刚柔耦合仿真
为进一步分析果树侧枝的响应特性,验证动力学模型的正确性以及采摘执行机构的可行性,本节基于ANSYS 和ADAMS 对振动系统进行刚柔耦合仿真。
4.1 油茶果树柔性体模型的建立
油茶果树柔性体的建立过程:首先在SOLIDWORKS中建立油茶果树的三维模型,之后将其导入ANSYS 中,利用蜘蛛网法进行油茶果树的柔性体生成,最后生成油茶果树柔性体MNF 文件导入到ADAMS 软件中。
对于果树三维模型的构建,国内外许多学者进行了深入研究。王剑等对果树的模型建立提出了不同方法[24]。本文构建油茶果树三维模型,目的是对油茶果树在振动采摘过程中进行动力学分析,侧重点在于枝干的位置、结构以及力学性能等。本文在研究油茶果树的生长情况后,发现油茶树的结构特点为:1)油茶树整体大致对称;2)侧枝(一级枝条)沿主干生长方向具有层次特征,侧枝与主干夹角沿主干生长方向逐渐减小,在25°~40°之间;3)下级侧枝长度和根直径等尺寸明显小于一级侧枝。随机选取上述27 棵中的6 棵油茶树进行尺寸测量,测量内容主要为主枝干的直径以及高度,一级侧枝的直径、长度和分布情况。利用递归算法[25]得到如表3 的测量结果。
根据已有研究[26],油茶树的树形为自然圆头形,分枝模式上属于单轴分枝,可将其构造为Leeuwenberg 模型,故将油茶果树模型进行如下简化:
1)将主干简化为锥台,高度为2 200 mm;
2)将侧枝之后的结构忽略,为补偿忽略结构的质量,将侧枝视为圆柱。
综上所述,可以看到深化设计在FUJAIRAN BUSINESS CENTRE PROJECT工程施工过程中起到了至关重要的作用,其与各施工要素之间有着紧密的联系。笔者作为该项目的项目经理,通过对本项目深化设计的总结分析,不仅为公司后续海外幕墙工程提供了一定的参考价值,也为其他企业在的海外幕墙工程施工中提供了管理思路。
简化之后的果树侧枝数据如表3 所示。

表3 油茶树枝干实测尺寸 Table 3 Actual measured size of Camellia Oleifera tree's trunk and branch
根据上述参数,在SolidWorks 中建立油茶果树三维 模型,将建好的模型导入ANSYS 中,根据已有研究[27],设定油茶树的弹性模量3×109Pa,泊松比0.17,材料密度1345 kg/m³。选择不规则三维实体网格划Solid186 单元,设定网格长度为6 mm,采用梁单元beam188 单元实现交互界面的6 个自由度[28]。界面点数为4 个,其中一个为果树与地面的交互点,3 个为树干与夹持机构的交互点,高度分为1300、1000 和700 mm。导出MNF 文件时,模态阶数为30[29]。油茶树柔性体模型如图5 所示。

图5 油茶树柔性体模型 Fig.5 Flexible body model of Camellia Oleifera tree
生成柔性体中性MNF 文件后,导入ADAMS/View后,需要校验其传输是否正确。分别从ANSYS 和ADAMS 中抽取前10 阶模态,进行固有频率对比,如表4 所示。对比可知,导入前和导入后差别较小,柔性体传输无误。

表4 油茶树侧枝简化参数 Table 4 Simplified parameters of Camellia Oleifera tree's branch

表5 油茶树柔性体模态固有频率 Table 5 Natural frequency of Camellia Oleifera tree flexible body mode Hz
4.2 模型构建及仿真分析
将在SolidWorks 中建立好的振动头模型和果树柔性 体模型导入到ADAMS 中,建立刚柔耦合模型,如图6所示,其中钢丝绳用细杆代替。

图6 振动头-油茶树刚柔耦合模型 Fig.6 Rigid-flexible coupling model of vibratory head and Camellia Oleifera tree
1)布尔运算。上述模型导入后,需要对振动头相关零部件进行布尔运算。本模型中振动头的箱体以及连接杆、液压马达和轴承座等合并成一个整体,偏心块、轴、齿轮等合并成一个整体。
2)添加约束。根据振动头的工作原理,工作时只有偏心块、轴转动。因此对2 个轴添加2 个转动副,钢丝绳和上固定杆添加转动副,和振动头的连接杆添加固定副。因ADAMS 不能直接向柔性体添加柔性约束,如Bushings、Beams 等。解决此类问题的方法是建立一个油茶果树的哑物体,将其质量和惯量都设为零。将油茶果树哑物体和柔性体放到一个位置,两者用固定副连接,振动头夹持机构和油茶果果树刚性连接,为模拟油茶果树和土壤接触效果,用阻尼器来代替,参考相关文献[30],阻尼器参数分别设置为:100、1 000、2 480 和500。
3)施加驱动。在2 个转动副上添加2 个转向相反的转动驱动

图7 刚柔耦合模型的侧枝夹持点加速度响应仿真结果 Fig.7 Acceleration response simulation results of side branch clamping point for rigid-flexible coupling model

图8 夹持点轨迹散点图 Fig.8 Clamping point track scatter plot
本文建立的刚柔耦合振动模型中,2 个偏心块对称布置,转向相反,所以2 个偏心块在y 方向上的力抵消,在x 方向的力叠加,振动方向为x 方向。由图6 可知,相同采摘频率下,随着夹持高度的增加,侧枝加速度逐渐增大;相同夹持高度下,随着激振频率的增加,侧枝加速度逐渐增大。且侧枝加速度周期和偏心块振动周期一致,在激振频率18 Hz、夹持高度1 300 mm 时,侧枝加速度最大达到2.84×105m/s2,预计采收效果最好。侧枝在x 方向的加速度远远大于在y 方向的加速度,夹持位置的加速度也成周期性变化且小于侧枝加速度。由图7 可知,夹持点位置集中在y 轴上下两侧附近区域,在x 方向往复运动,仿真轨迹与理论推导一致。
由以上分析可知,果树受迫振动为周期性振动,其加速度响应随激振频率和夹持高度的变化而变化。
5 油茶果振动采收试验
为验证悬挂振动式油茶果执行机构的采摘效果,进行样机实地采摘试验。 试验于2017 年10 月份在湖南省长沙市中南林业科技大学雪峰山油茶基地进行,试验树种为国家油茶林示范基地培育7 a 生油茶树,与前文测量的油茶树相同。
5.1 试验设计
5.1.1 试验指标
油茶果为花果同期植物,在油茶果成熟季节,油茶花含苞待放。因此振动采收试验的试验指标有2 个:落果率和落花率。试验前,人工对每棵油茶树上的油茶果和油茶花数量进行统计,试验后统计振落和未振落的油茶果和油茶花数量,计算落果率和落花率。设每次振动试验掉落的果实数量为N1,未掉落果实数量为N2,落果率为y1,掉落的花朵数量为P1,未掉落花朵数量为P2,落花率为y2。则有:
5.1.2 试验因素确定
油茶果是否掉落取决于果实振动过程中的惯性力能否满足果实柄端的断裂条件。根据前文分析可知,影响油茶果树振动加速度的因素有激振频率(A)和夹持高度(B)。
5.1.3 因素水平确定
果树振动采摘频率一般为10~20 Hz[30-33],本次试验采取3 种采摘频率进行,分别为12,15 和18 Hz。试验时通过改变驱动马达的流量来改变偏心块转速,用测速表测定偏心块转速并换算为频率。
根据实地测量油茶果树数据,对前文所测量的27 棵油茶树进行采摘试验,取700~1 300 mm 高度为夹持范围,试验时分别取700、1 000 和1 300 mm 夹持高度。
5.2 试验结果与分析
本次试验为二因素三水平试验,共9 组,每组试验重复3 次,振动测量仪器为背景时代山峰科技有限公司的研发的TV360 便携式测振仪。图9 为试验现场。

图9 采摘试验 Fig.9 Picking test
5.2.1 不同激振频率和夹持高度下的树干振幅
由表6 可知,在相同夹持高度下,随着激振频率的增加,树干振幅逐渐增大;在相同夹持高度下,随着激振频率的增加,树干振幅逐渐增大。试验得出树干振幅在25~47 mm 之间。

表6 不同频率和夹持高度下树干振幅 Table 6 Trunk amplitude at different frequencies and clamping heights
5.2.2 落果率和落花率试验结果与分析
由表7 可知,当夹持高度(B)和树干振幅一定时,落果率随着采摘频率(A)的增加而增大,落花率随着采摘频率的增加而减小;当采摘频率(A)一定时,随着夹持高度(B)的增加,落果率增大,落花率减小;当采摘频率(A)和夹持高度(B)一定时,随着振幅的增加,落果率增大,落花率减小。其中在激振频率18 Hz、夹持高度1300 mm、树干振幅47 mm 时,落果率最大为96.8%;在频率12 Hz、加持高度1 300 mm、树干振幅37 mm 时,落花率最小为3.4%。试验总体采摘效果效果良好,落果率在80%以上,落花率在12%以下。
根据试验结果,对落果率和落花率进行极差分析,如表8 所示。
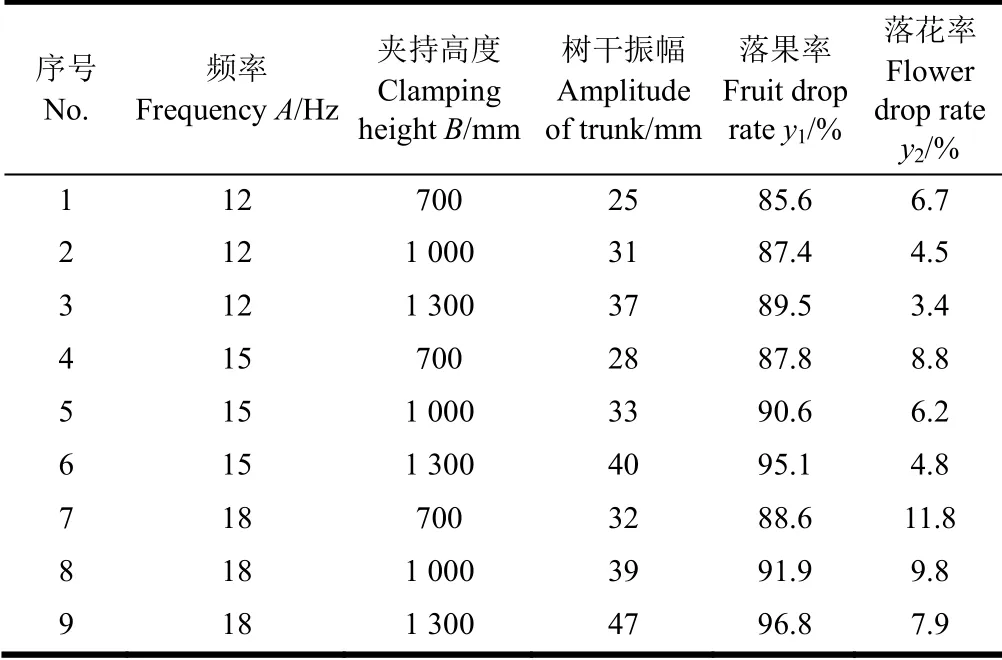
表7 不同频率和夹持高度下试验结果 Table 7 Test results at different frequencies and clamping heights
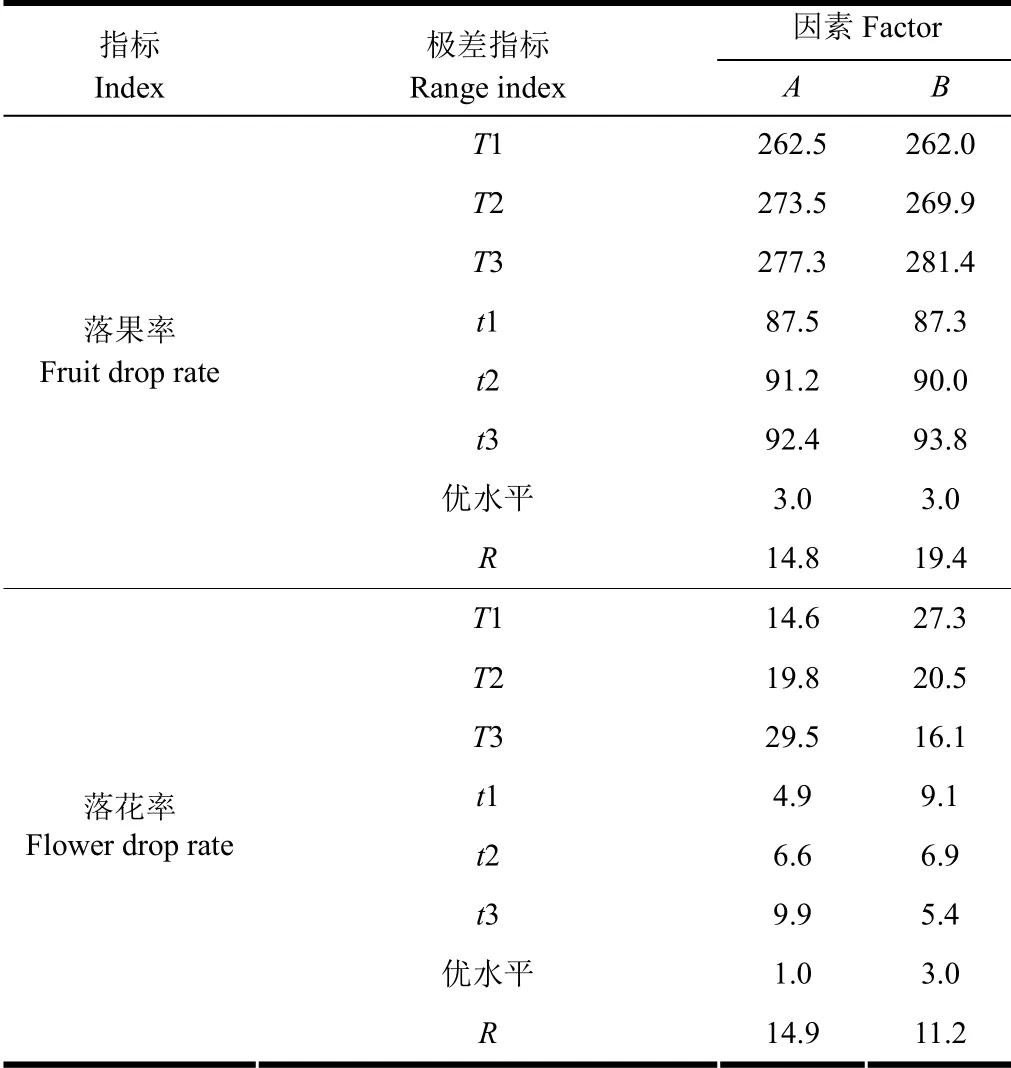
表8 落果率和落花率极差分析表 Table 8 Range analysis table of fruit drop rate and flower drop rate
由表7 可知,落果率的最优组合为A3B3,,落花率的最优组合为A1B3。分析表7 可知,随着频率(A)的增加,落果率逐渐增大,增加幅度逐渐减小。随着夹持高度(B)的增加,落果率逐渐增大,夹持高度为1 300 mm 时落果率最大。随着频率(A)的增加,落花率逐渐增大,增加幅度逐渐减小。随着夹持高度(B)的增加,落花率逐渐减小,夹持高度为1 300 mm 时落花率最小。
5.3 多指标分析与最优参数确定
由前面的分析可知,落果率和落花率2 指标的最优方案不同,为了两者兼顾,采用综合评分法进行最优方案确定,评分标准如下:
1)当落果率1y 大于95%时,得分p1=100;当落果率1y小于89%,p1=0 分;当落果率位于两个之间时,得分如下:

2)当落果率2y 大于10%时,得分p2=0;当落果率2y 小于6%,p2=100 分;当落果率位于两者之间时,得分如下:

3)通过调查湖南省各大油茶种植基地在油茶国采收时对落果率和落花率的重视程度,分配落花率得分在总得分中占60%,落果率得分占40%。
根据以上标准,得到综合评分如表9 所示。

表9 综合评分表 Table 9 Comprehensive score table
由综合评分表可知,在采摘频率15 Hz,夹持高度1300 mm 时,落果率为95.1%,落花率为4.8%,综合评分最高为100 分。
6 结 论
1)针对油茶果等生长环境的特点,设计了悬挂振动式采摘机,介绍了采摘机悬挂振动式执行机构的机构组成,主要由立柱机构和振动头机构组成。
2)建立了双偏心式振动采收动力学模型,分析得出位移、速度、加速度成周期性变化,且响应的振幅和相位角取决于系统本身,和初始条件无关。
3)通过ANSYS 和ADAMS 对悬挂振动式采摘模型进行刚柔耦合仿真,分析得到采摘执行机构在进行采摘工作时,侧枝加速度呈周期性变化,在相同采摘频率条件下,侧枝加速度随着夹持高度的增加而增大且明显大于夹持位置加速度。夹持高度相同时,采摘频率越大侧枝加速度越大,且采摘振动主要表现为单自由度振动。
4)试验表明,随着激振频率的增大,树干振幅逐渐增大,落果率和落花率逐渐增大;落花率随着夹持高度的增加而减小,随着频率的增大而增大。用综合评分法进行过指标分析,得出在采摘频率15 Hz 和夹持高度为1 300 mm 时,落果率落花率分别为95.1%和4.8%,采摘效果最好。
