USV-LIF遥测系统的控制系统设计与实现❋
2019-02-21刘德庆栾晓宁叶旺全刘晓瑞金久才郑荣儿
刘德庆, 栾晓宁, 叶旺全, 刘晓瑞, 金久才, 郑荣儿❋❋
(1.中国海洋大学光学光电子实验室,山东 青岛 266100; 2.国家海洋局第一海洋研究所,山东 青岛 266100)
激光荧光(Laser induced fluorescence, LIF)传感器作为一种主动探测技术,是进行海洋溢油探测最有效的手段之一[1-2]。传统的机载和船载激光荧光遥感技术一般适合于大范围走航式探测[3-8],然而对于海洋中溢油事故发生频繁的特定区域的溢油监测需求,如近岸港口、钻井平台周边以及重要海上航道等,采用无人船搭载激光荧光传感器进行探测更为方便。发展面向无人船应用的激光荧光遥测系统可有效解决上述特定区域的溢油监测问题。
无人船(Unmanned surface vehicle, USV)作为一种新型的水上环境监测平台,可搭载多种传感器,并且以布放灵活、成本经济、自动测量等特点,在海洋环境监测中具有明显技术优势[9-10],其在水质测量、水环境调查、水深测量以及海洋物理参数测量等方面得到应用[11-13];将激光荧光系统与无人船平台结合,这是本文工作的动机所在,可望拓展溢油激光探测和无人船平台的应用范围。
本文从基于无人船的激光荧光遥测系统(USV-LIF遥测系统)的总体设计出发,并详细设计USV-LIF遥测系统的控制系统,以期满足无人船载激光荧光遥测系统用于现场探测的控制需求。
1 USV-LIF遥测系统总体设计
USV-LIF遥测系统主要包括岸基终端和USV-LIF现场机两部分,图1为其总体结构图。USV-LIF现场机以无人船为运载平台,通过无线通信与岸基终端进行交互。考虑到传输距离、数据传输速率以及成本等因素,所研制USV-LIF遥测系统的岸基终端与现场机之间采用无线网桥通信方式,通信距离一般可以达到3~5 km[14-15]。
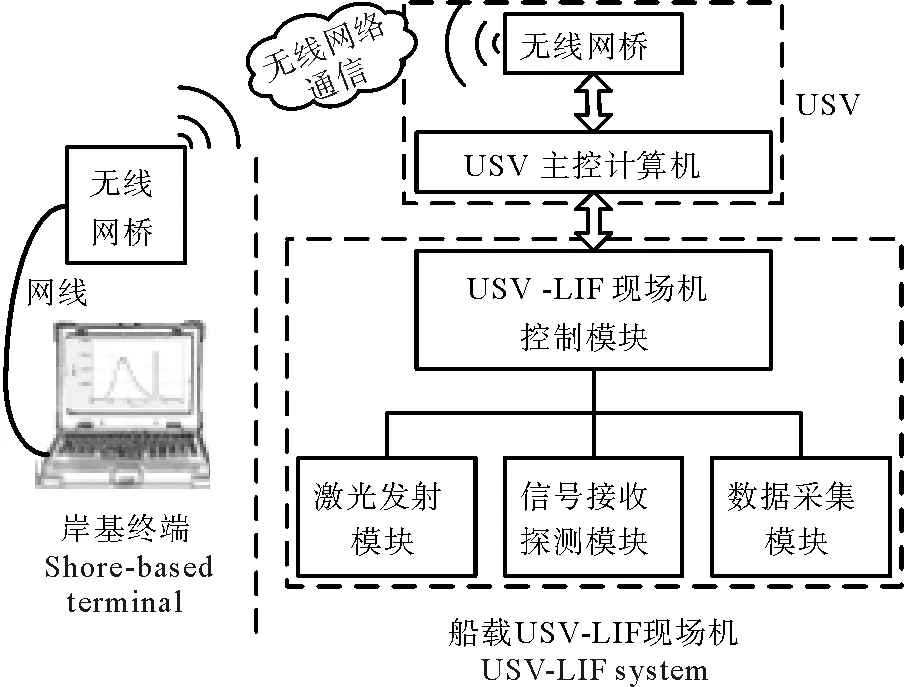
图1 USV-LIF遥测系统总体结构
如图1所示,岸基终端通过无线网桥实时访问USV-LIF现场机并获取采集的数据以及现场机中各仪器工作状态;USV-LIF现场机作为无人船平台上的一个传感器,主要由激光发射模块、信号接收与探测模块、数据采集模块以及现场机控制模块等构成。表1给出了目前实验室内搭建的USV-LIF现场机中各功能模块的功耗情况,估算其总功耗约为150 W。所用无人船采用锂电池供电,电池容量有12V20Ah和24V100Ah两种[9]。以24V100Ah的锂电池为USV-LIF现场机供电可满足系统运行需求。
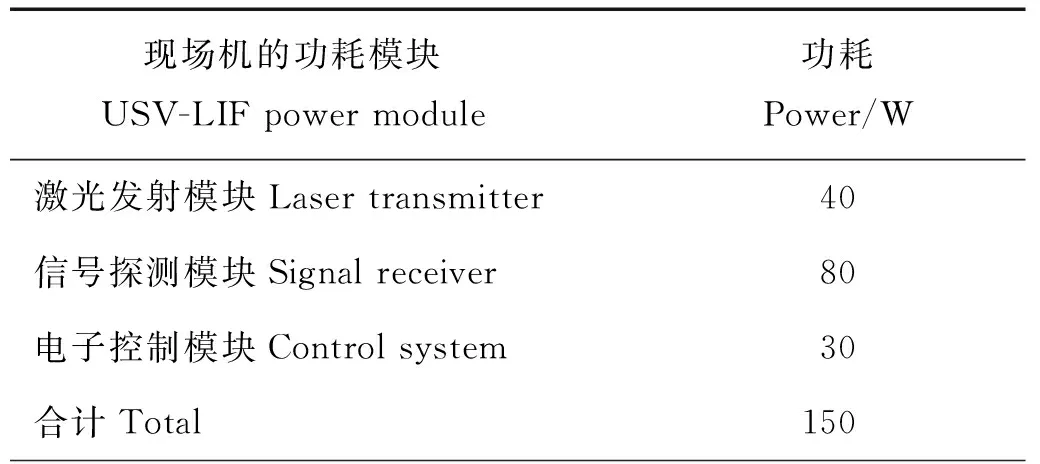
表1 USV-LIF现场机各功能模块的功耗Table 1 Power consumption of each modules in USV-LIF system
文中针对USV-LIF遥测系统所设计的控制系统由岸基远程控制模块和USV-LIF现场机控制模块两部分组成。其中,岸基远程控制模块主要实现岸基终端与USV-LIF现场机之间的控制与通信;USV-LIF现场机控制模块则主要实现对现场机中的仪器状态控制、数据采集、时序控制以及与无人船平台上其他传感器(如GPS)之间协同操作等功能。
2 USV-LIF现场机控制模块设计
图2是USV-LIF现场机的控制模块结构图。现场机控制模块负责协调现场机的整体运转,包括仪器状态控制、数据采集、时序控制以及与无人船之间的协同操作等,同时负责与岸基终端之间的信息传输。
如图2所示,现场机控制模块选用PC104工控机作为控制器,通过串口与USV主控计算机连接。USV主控计算机通过无线网桥接收来自岸基终端的控制指令,然后经串口转发到PC104工控机。工控机根据岸基指令控制现场机中的仪器设备,包括激光器、探测器ICCD以及数据采集模块等,并将测得的光谱数据实时回传到USV主控计算机。USV主控计算机读取光谱采集时刻所对应的GPS数据,然后通过无线网桥将光谱、GPS数据以及对应的时间信息一起回传到岸基终端,以确保所探测到的光谱数据与USV的走航信息对应。

图2 USV-LIF现场机控制系统结构图
USV-LIF现场机的控制软件流程如图3所示。软件运行时,首先进行串口初始化和探测器ICCD控制卡初始化,然后控制现场机中各仪器状态,包括激光器的工作参数设置和开关、ICCD的温控开启等,在此基础上,确定并设置信号采集参数,最后进行数据采集。为了确保系统采集数据的可靠性,避免远距离传输造成回传数据的错误,数据采集后进行双备份,一份在USV-LIF现场机存储备份,另一份则通过无线网桥通信传输到岸基终端。对激光器的串口通信控制以及ICCD的数据采集,分别采用厂家提供的串口通信协议和软件开发包,利用C#编程语言软件开发实现。

图3 USV-LIF现场机的控制软件流程图
USV-LIF现场机的时序控制是通过图2中所示的延时发生器和ICCD内部的DDG(Digital delay generator)实现的。图4是USV-LIF现场机的时序图。延迟发生器输出两路具有固定延时Δt2的TTL信号,分别用于激光器和ICCD的触发信号,其中,激光器与ICCD均为外触发工作模式。从激光器触发到激光输出有固定延时Δt1,t1是从激光输出到信号返回的传输延时,通过调节ICCD的门脉冲延时t2,在信号返回时,以准确打开ICCD的电子快门,有如下关系t1+Δt1=t2+Δt2,进而探测返回的信号,即实现距离选通探测。电子快门的门宽Δt3可调。

图4 USV-LIF现场机的控制时序图
3 岸基远程控制模块设计
USV-LIF遥测系统的远程控制模块实现岸基终端与USV-LIF现场机的交互,表2中列出了岸基终端与现场机通信传输的数据种类,包括指令帧和数据帧两种格式。指令帧主要是从岸基终端往USV-LIF现场机发送的控制指令;数据帧则主要包括从是从现场机返回的仪器状态参数、光谱数据以及GPS信息等。
图5是开发的USV-LIF遥测系统的岸基控制软件界面。主要的功能模块有(1)网络通信参数配置;(2)岸基控制指令发送;(3)实时接收现场机采集数据;(4)数据存储与显示等。岸基计算机与USV主控计算机之间采用基于TCP/IP协议的Client/Server结构,其中,岸基计算机为客户端,无人船主控计算机为服务器,它们之间网络通信的关键是配置访问IP地址和网络端口号。岸基终端与现场机之间的无线网络通信采用Modbus串行通信协议进行数据传输。从岸基发送的控制指令主要包括激光器控制、ICCD温度控制以及数据采集等指令;待岸基终端接收到现场机采集的光谱和GPS等数据后,进行存储与显示。接收并显示的光谱数据有两种格式,分别为时间序列和二维光谱,其中,时间序列光谱用于确定系统最佳探测延时参数。
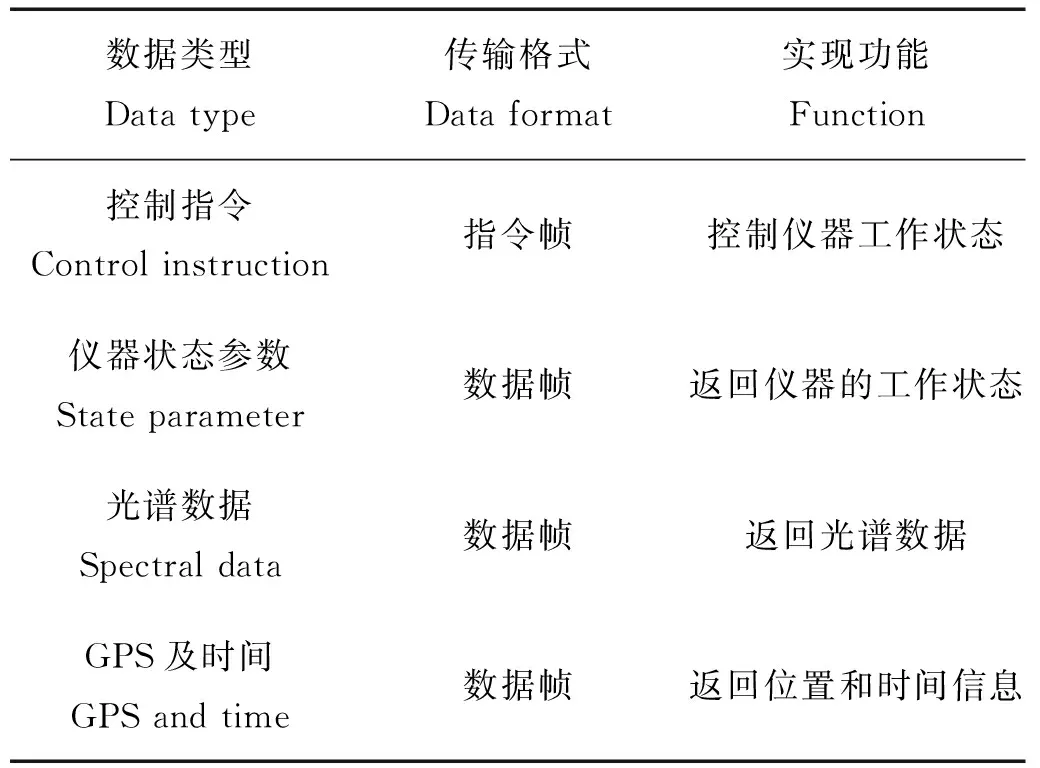
表2 岸基终端与USV-LIF现场机通信的数据种类
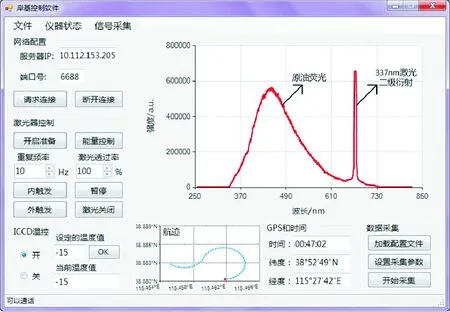
图5 USV-LIF遥测系统的岸基控制软件界面
4 USV-LIF遥测系统实验室模拟联调测试
在实验室利用研制的USV-LIF遥测系统进行模拟联调测试,分别对系统的整体运行、远程控制数据传输以及系统的长时间连续工作进行测试试验。在测试过程中,为了模拟系统现场运行的状态,由一台计算机模拟USV主控计算机,通过串口与USV-LIF现场机连接,而现场机则在实验室内能够对5 m(满足船载探测的需求)远处水槽中原油进行荧光探测;另一台计算机模拟岸基终端,布置在距测试地点一定距离的地方,通过无线网络与USV-LIF现场机进行通信交互。
4.1 USV-LIF遥测系统工作状态测试
系统的整体工作状态模拟测试,包括定点探测和走航探测两种运行状态的测试。
4.1.1 定点测试 USV-LIF遥测系统的定点探测主要是确定系统的最佳探测参数。首先确定延时参数。ICCD的门脉冲延时是通过时间序列信号测量来获得的,即在系统其他探测条件不变的情况下,先设定一个初始的门脉冲延时,然后以一定步长顺序改变延时参数,测得不同时刻的信号,根据探测信号强度随时间的变化,以判断最佳探测延时。
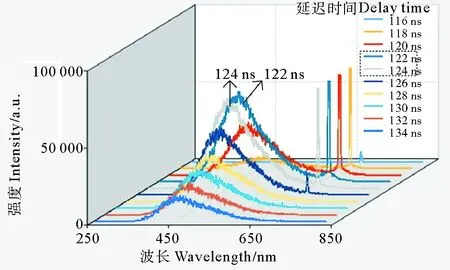
图6 时间序列光谱采集模式下的岸基软件截图
图6是时间序列光谱采集模式下的测试结果。该结果是在固定ICCD探测门宽为10 ns,门脉冲延时顺序改变的时间间隔为2 ns的条件下测得的。从图中可以看到,在5 m探测距离条件下,门脉冲延时为116 ns时,开始探测到信号,随着延时的增加,系统在延时为122~124 ns时信号最强。
在光谱数据采集时,通过多次累积采集的方式以提高数据的信噪比,因此,需要确定在满足信噪比的前提下数据采集的累积次数。
图7是不同数据采集模式下的测试结果,其中图7(a),7(b)分别对应单次采集模式和累积采集模式下(10次累积)的测量结果。测试时设定的探测参数为:门脉冲延时123 ns,门宽10 ns。图7显示,累积模式下信噪比明显优于单次采集模式。通过适当的增加数据采集的累积次数可以提高信噪比。
4.1.2 模拟走航测试 对USV-LIF遥测系统随无人船平台走航探测的过程,在实验室进行模拟测试。无人船走航的GPS信息由USV主控计算机模拟产生。USV-LIF现场机用于测量水槽中不同位置处原油油膜的荧光信号。待采集的光谱数据传输到USV主控计算机时,同时读取GPS和USV主控计算机系统时间信息,然后协同光谱数据一起传输到岸基终端,在岸基软件界面上实现显示模拟无人船的航迹和当前位置处采集的光谱数据,如图5所示,并对获得的数据进行存储。测试过程总共采集了50组光谱数据及对应的走航信息。图8是模拟走航探测的测试结果,图中所表示的是每个位置处所采集原油荧光的峰值强度随模拟航迹的变化。
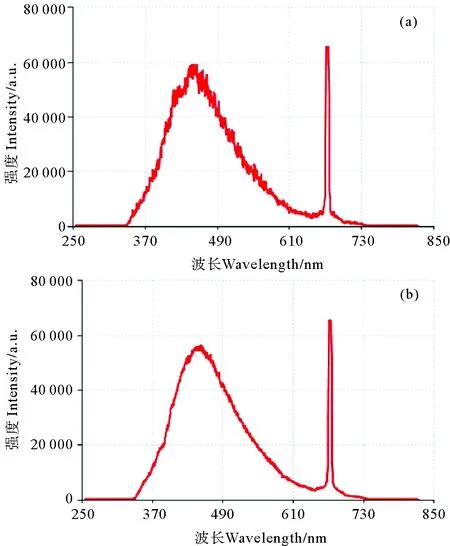
((a) 单次采集模式, (b)累积采集模式(10次累积)。(a) Single acquisition mode, (b) Accumulation acquisition mode (10 times).)
图7 不同数据采集模式下的岸基软件截图
Fig.7 The shore-based software screenshot at different data acquisition mode
4.2 远程控制通信稳定性测试
远程控制和数据传输是USV-LIF遥测系统中的关键功能模块,此部分主要是对岸基终端与USV-LIF现场机之间的无线网络通信,以及系统的长时间连续运行功能进行测试。系统运行时,由岸基终端连续向现场机发送控制指令,每30 s发送一次,以控制系统的运行,采集的数据在现场机备份后,再以数据帧的形式实时上传到岸基终端,并显示和保存。系统连续运行约5 h,总共采集了606组光谱数据,并将现场机备份的数据与岸基终端保存的数据进行对比分析。

图8 模拟走航探测的测试结果

传输数据Data type应传数据量Transmitteddata接收数据量Receiveddata传输正确率Transmissionaccuracy/%指令帧Instruction frame613613100数据帧Data frame1 8471 847100数据文件Data file606606100测得数据Measured data620 544620 544100
表3为USV-LIF遥测系统连续运行的远程通信功能测试结果。从表3中的数据可以看出,经过约5 h的连续运行测试,岸基终端与现场机之间传输指令帧、数据帧、数据文件以及光谱数据的正确率均为100%,表明USV-LIF遥测系统具有较稳定的数据通信功能和较高的数据传输正确率。另外,考虑到该测试为实验室工作环境下进行的,USV-LIF遥测系统远程控制通信功能还有待现场工作环境的检验。
5 结语
针对港口等溢油事故频发区域的环境监测应用需求,本文对USV-LIF遥测系统进行了总体方案设计,并详细设计了其控制系统,该系统包括岸基远程控制模块和USV-LIF现场机控制模块两部分。利用无线网络通信链路实现从岸基终端对USV-LIF现场机的远程控制与通信,并通过USV-LIF现场机的控制模块实现对现场机的仪器状态控制、数据采集以及时序控制等功能。在实验室条件下,对USV-LIF遥测系统的整体运行、远程控制数据传输以及系统的长时间连续工作进行了模拟联调测试,结果表明,所研发的控制系统的功能基本达到了现场探测需求。对现场机的电源管理和俯仰调节功能模块进一步完善,并与无人船USBV[9,13]对接进行海上试验,将是下一步工作的重点。
