基于分散化神经鲁棒控制的轨迹跟踪算法研究
2019-02-19胡海兵杨建德张结文金施群
胡海兵 杨建德 张结文 金施群
关键词: 神经鲁棒控制器; 轨迹跟踪; 递归神经网络; 滤错训练算法; 鲁棒项; 机械臂
中图分类号: TN911.1?34; TP241.2 文献标识码: A 文章编号: 1004?373X(2019)03?0111?05
Abstract: In order to eliminate the influence of external disturbance and modeling error on manipulator′s trajectory tracking accuracy, the recurrent neural network is used to design the decentralized neural robust controller, and the subsystem of each joint state equation of the manipulator is used to represent the whole system. The error?filtered training algorithm is adopted to estimate the unknown weight coefficients of the neural network. The robust item is introduced to suppress the mutual influence and modeling error between the joint neural controllers. The stability of the neural network is proved by Lyapunov function. In comparison with the simulation results without robust item, the decentralized neural robust controller has more precise trajectory tracking accuracy, better error convergence, and higher stability.
Keywords: neural robust controller; trajectory tracking; recurrent neural network; error?filtered training algorithm; robust item; mechanical arm
0 引 言
随着机器人制造业的迅速发展,未来社会必将是“人工智能”的时代,如今机器人已被广泛地应用于工业、军事以及日常生活当中。在机器人领域中,也已经提出了各种方案保障闭环系统的稳定性,提高轨迹跟踪的精度。文献[1]设计了鲁棒自适应控制器用于空间绳系机器人的目标抓捕,仿真结果表明鲁棒控制方法可以有效地补偿系统的不确定性,提高系统的精度;神经网络和模糊控制能够很好地逼近非线性系统,实现对不确定系统未知部分的在线精确逼近,文献[2]对具有外部扰动的双臂机器人使用在线自学习补偿的神经网络控制,有效地补偿了外部扰动对轨迹跟踪精度的影响。
人工神经网络(ANN)的研究证实了其对非线性系统逼近能力的优越性,文献[3]使用多层神经网络结合滤错算法实现对串联链式机器人手臂的轨迹跟踪控制。神经网络控制技术的快速发展提供了新的途径来实现神经控制算法的集中式控制,然而對于高度复杂的非线性系统,由于系统参数存在强互联性,要想准确逼近其数学模型很困难,往往需要进行大量的数学运算,这样就大大降低了效率。因此,文献[4]提出一种高阶循环神经网络分散化控制方案,考虑到整体系统是由各个相互关联的子系统构成,所以可以设计独立子系统的神经控制器,每个子系统只有局部变量,这样便可以大大简化传统神经网络训练的复杂度,提高了系统的实时性。文献[4]设计的分散化神经控制器运用到二自由度机器人手臂的控制中,在假设系统模型理想化,关节之间没有任何干扰的前提下,设计每个关节独立的状态方程。
本文在文献[4]研究的基础上考虑系统模型存在误差,以及各关节之间存在相互扰动的情况,设计了一种分散化神经鲁棒控制器,通过离散化高阶神经网络模型结合滤错训练算法构造子系统状态方程,在控制律中增加鲁棒项抵消外部扰动对控制器产生的干扰,然后构造Lyapunov函数证明控制器的稳定性,在以二自由度机器人手臂为控制对象的前提下仿真验证了其轨迹跟踪的精度,同时对比了在无鲁棒控制项下,外部扰动对分散神经控制器的影响。

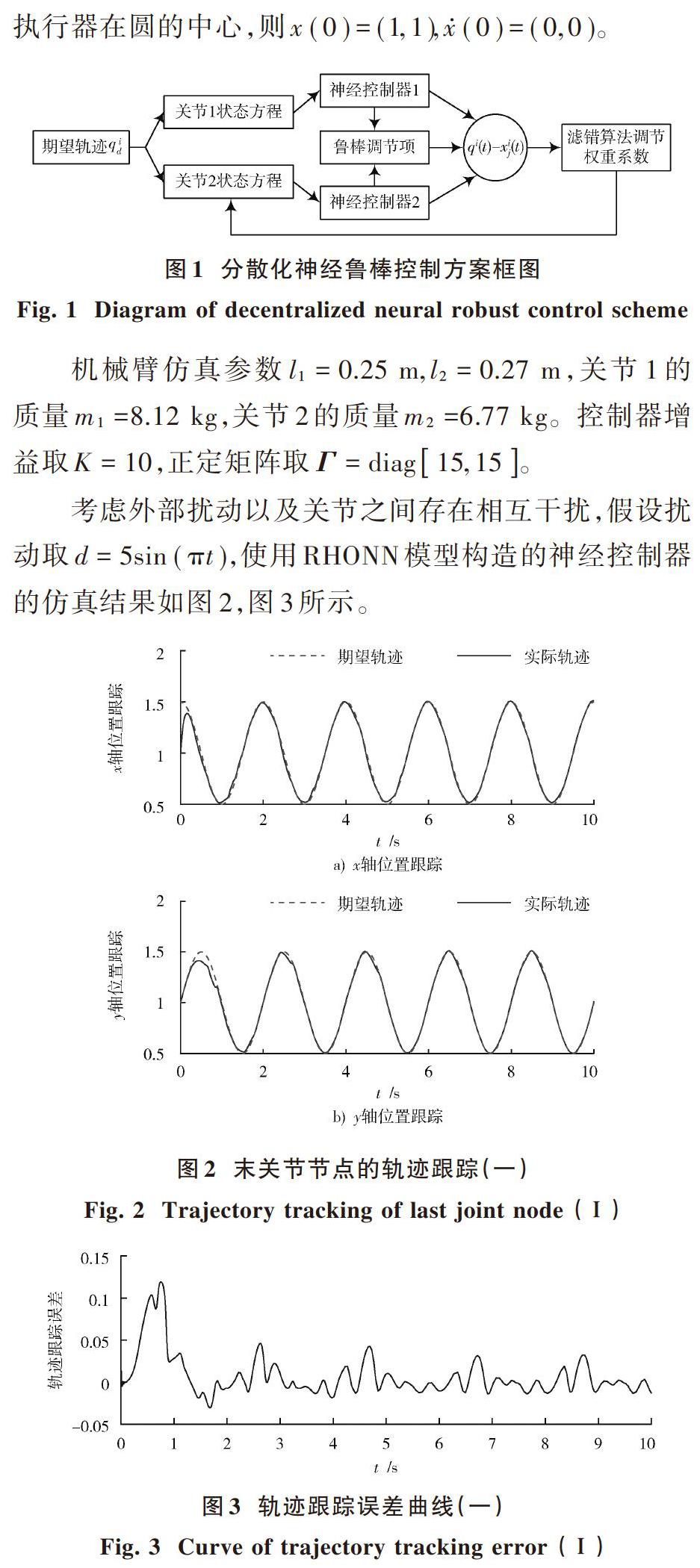
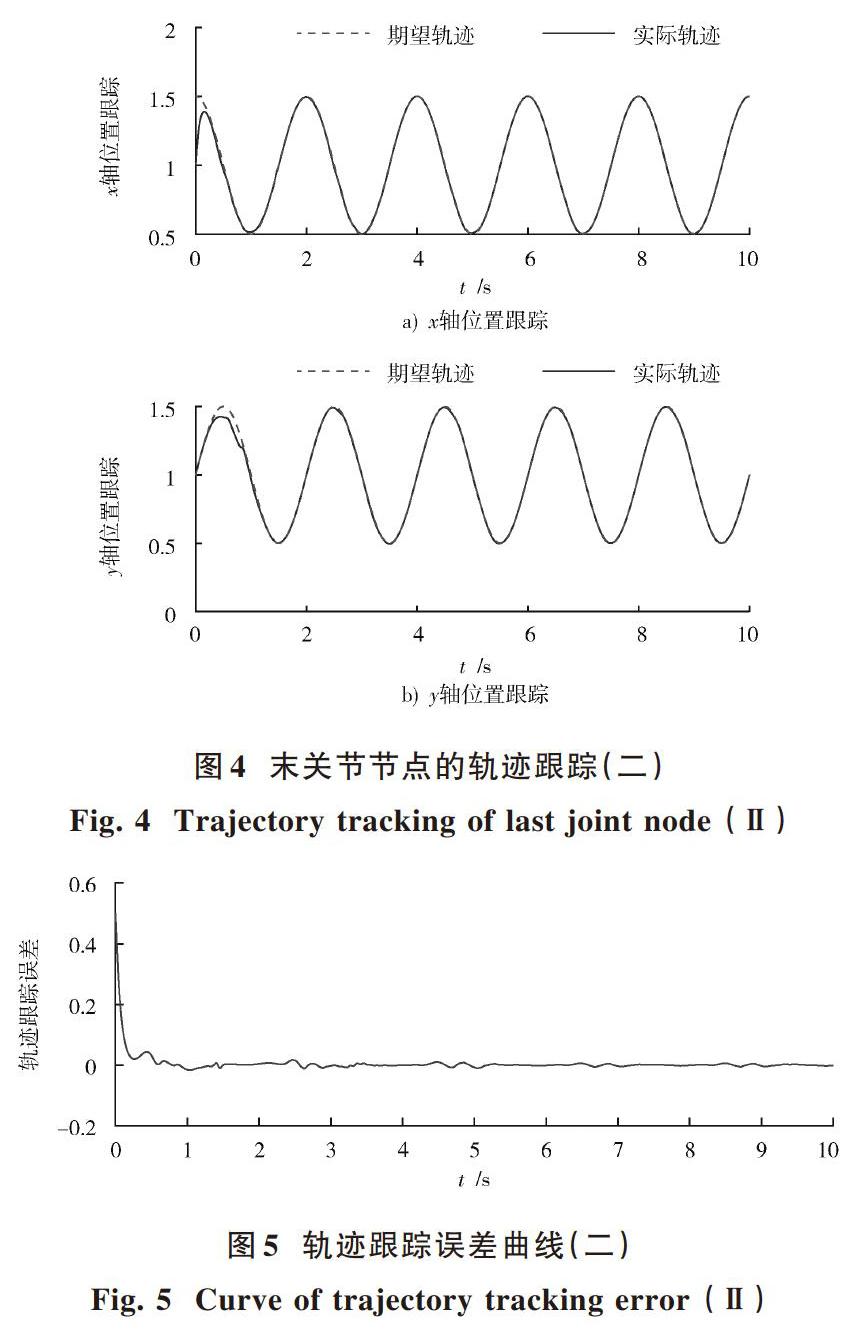
从图2,图3可以看出,轨迹跟踪的误差存在波动,说明外部扰动对跟踪精度产生一定影响。为了抵消外部扰动,使得轨迹跟踪的结果更为精确,添加鲁棒项的分散神经控制器的仿真结果如图4,图5所示。
对比两种方法的仿真结果可以看出,分散化神经鲁棒控制器的误差趋近于零,而且稳定性更高,能够有效抑制干扰信号,没有添加鲁棒项的神经控制器轨迹跟踪的精度受外部干扰的影响较大,误差波动较大,收敛性较差。因此,添加鲁棒项的分散神经控制器相对于没有鲁棒项的神经控制器轨迹跟踪的精度更高,鲁棒性更强。
4 结 语
针对分散化神经控制器关节之间的相互影响以及建模误差对机械臂轨迹跟踪精度产生的影响,设计了神经鲁棒控制器,通过鲁棒项抑制干扰和误差,仿真结果表明设计的控制器可以有效跟踪设定的期望轨迹,误差波动较小,稳定性和轨迹跟踪精度比较高。对于关节之间的干扰以及建模误差的扰动信号假设是有界的,如果扰动信号是无界的情况需要进一步探讨,这也是后续研究的方向。
参考文献
[1] 黄攀峰,胡永新,王东科,等.空间绳系机器人目标抓捕鲁棒自适应控制器设计[J].自动化学报,2017,43(4):538?547.
HUANG P F, HU Y X, WANG D K, et al. Capturing the target for a tethered space robot using robust adaptive controller [J]. Acta automatic Sinica, 2017, 43(4): 538?547.
[2] 陈志勇,陈力.具有外部扰动双臂空间机器人的神经网络在线自学习补偿控制[J].中国机械工程,2010(17):2114?2118.
CHEN Z Y, CHEN L. On?line self?learning compensation control for dual?arm space robot with external disturbances via neural network [J]. China mechanical engineering, 2010(17): 2114?2118.
[3] LEWIS F L, YEGILDIREK A, LIU K. Multilayer neural?net robot controller with guaranteed tracking performance [J]. IEEE transactions on neural networks, 1996, 7(2): 388?399.
[4] VAZQUEZ L A, JURADO F, CASTAENDA C E, et al. Real?time decentralized neural control via backstepping for a robotic arm powered by industrial servomotors [J]. IEEE transactions on neural networks & learning systems, 2016, 29(2): 419?426.
[5] GUO D, LI K, YAN L, et al. The application of Li?function activated RNN to acceleration?level robots′ kinematic control via time?varying matrix inversion [C]// 2016 Chinese Control and Decision Conference. Yinchuan: IEEE, 2016: 3455?3460.
[6] MALINOWSKI M T. Fuzzy and set?valued stochastic differential equations with local Lipschitz condition [J]. IEEE transactions on fuzzy systems, 2015, 23(5): 1891?1898.
[7] EKRAMAIN M, HOSSEINNIA S, SHEIKHOLESLAM F. Observer design for non?linear systems based on a generalised Lipschitz condition [J]. Control theory & applications, 2011, 5(16): 1813?1818.
[8] KOSMATOPOULOS E B, POLYCARPOU M M, CHRISTODOULOU M A, et al. High?order neural network structures for identification of dynamical systems [J]. IEEE transactions on neural networks, 1995, 6(2): 422?431.
[9] RASTOGI E, PRASAD L B. Comparative performance analysis of PD/PID computed torque control, filtered error approximation based control and NN control for a robot manipulator [C]// 2015 IEEE UP Section Conference on Electrical Computer and Electronics. Allahabad: IEEE, 2016: 1?6.
[10] JIN Y, FU J, ZHANG L, et al. Filtered?error?based control of a class of nonlinear systems with nonsmooth nonlinearities [C]// 2012 IEEE the 51st Cnference on Decision and Control. Maui: IEEE, 2012: 3463?3468.
[11] 方一鸣,李叶红,石胜利,等.液压伺服位置系统的神经网络backstepping控制[J].电机与控制学报,2014,18(6):108?115.
FANG Y M, LI Y H, SHI S L, et al. Neural network backstepping control of hydraulic servo position system [J]. Electric machines and control, 2014, 18(6): 108?115.
[12] ATHALYE C D. Necessary condition on Lyapunov functions corresponding to the globally asymptotically stable equilibrium point [C]// 2015 IEEE the 54th Conference on Decision and Control. Osaka: IEEE, 2015: 1168?1173.