基于TRIZ理论的电动式变胞装载机械手的设计①
2019-02-15李宪芝杨锡军李小海
李宪芝, 张 东, 庄 重, 杨锡军, 李小海
(1.佳木斯大学,黑龙江 佳木斯 154007; 2.欧菲影像技术(广州)有限公司,广东 广州 510000; 3. 佳木斯电机股份有限公司,黑龙江 佳木斯 154002)
0 引 言
1998年,在机构学与机器人学双年会上,变胞机构作为一种新型机构出现。1999年,戴建生与张启先将这种新型机构的研究引入到中国[1]。变胞机构可自我重组和重构,机构自由度、活动构件数目及拓扑结构会发生变化,应用于不同场合。经国内外十多年的研究,变胞机构的理论已经取得了初步成果,实际应用也取得一些成果。Dai等将变胞原理应用在机器人设计中,设计出新型的多指变胞手,该设计改变了传统的机器人仿生手手掌设计模式。多指机械手以球面五杆机构作为手掌,手掌的活动度增加,手指运动空间变大,可以满足不同任务要求,在灵巧性方面,该变胞手比现有的机器人手的设计更具有一定的优势。崔磊等设计了一种变胞多指灵巧手,能完成3种指尖抓持姿态,多指灵巧手的变胞功能既可增强机器手的灵巧度又可增大机器手的工作空间[4]。
应用Triz理论知识设计出变胞装载机械手,所设计的机械手,能够在工作过程中通过构件的合并固结成一个变胞构件,改变了活动构件数量、从而改变了拓扑结构,实现自我重组和重构。该机械手仅需一个驱动电机就能完成货物装载任务,能够适应不同工作阶段的任务需求,灵活地应用于不同场合。
1 利用Triz理论体系进行问题分析
1.1 系统分析
文中作品为变胞系统。变胞系统组成部分:动力装置(直流电机)、传动装置(连杆机构)、执行元件(机械手)、控制装置(单片机系统),变胞系统见图1所示。
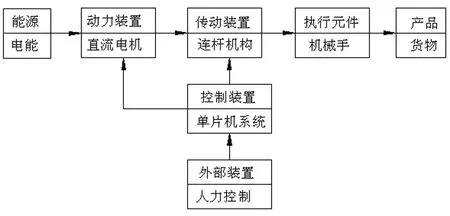
图1 变胞系统
1.2 功能分析
所设计产品的功能分析表见表1所示。
1.3 九屏分析
运用TRIZ理论九屏法对变胞装载机械手进行分析,如图2所示。
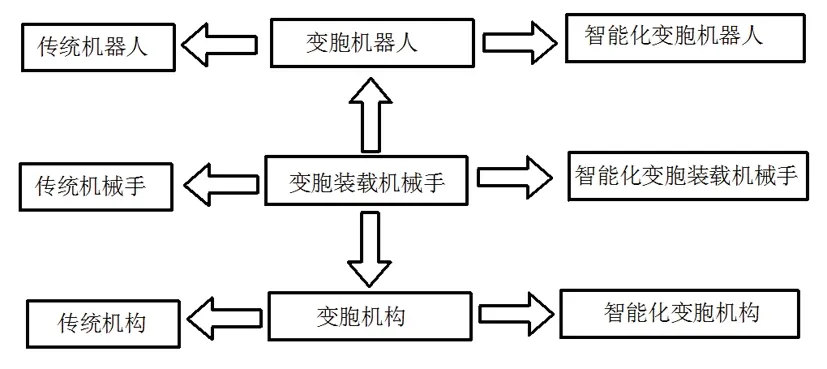
图2 九屏图

技术系统动力系统、变胞系统、运载系统用途运载货物技术功能运用变胞机构,仅需一台驱动电机就能完成传统两自由度液压装载机的装载任务主要功能搬运重物,手动将装载机移动到指定位置、自动抓取货物并举升,移动到目标地点后下降并释放,完成装载工作
1.4 资源分析
系统内部资源包括现有资源、派生资源,系统可引用的资源如下:
(1)现有资源:
物质资源:该变胞装载机械手由滑块、弹簧、电动机、连杆、轴承、单片机系统等组成;
能量资源:电能、电动机产生的机械能;
空间资源:产品采用机械变胞结构,提高了空间利用率;
时间资源:产品电机在单片机控制下可实现循环往复运动;
物质资源:六杆机构通过变胞形成三角形支架。
能量资源:采用电动机驱动,可将电能转化为机械能。
1.5 生命曲线
生命曲线见图3所示。目前我国货物装载机械手正处于快速发展阶段,随着对货物运输的效率和质量的重视,货物装载工具也越来越受到人们关注。正处于S曲线的成长期,拥有较大的发展空间和市场空间。
2 运用TRIZ工具解决问题
2.1 最终理想解
最终理想解分析见表2所示。
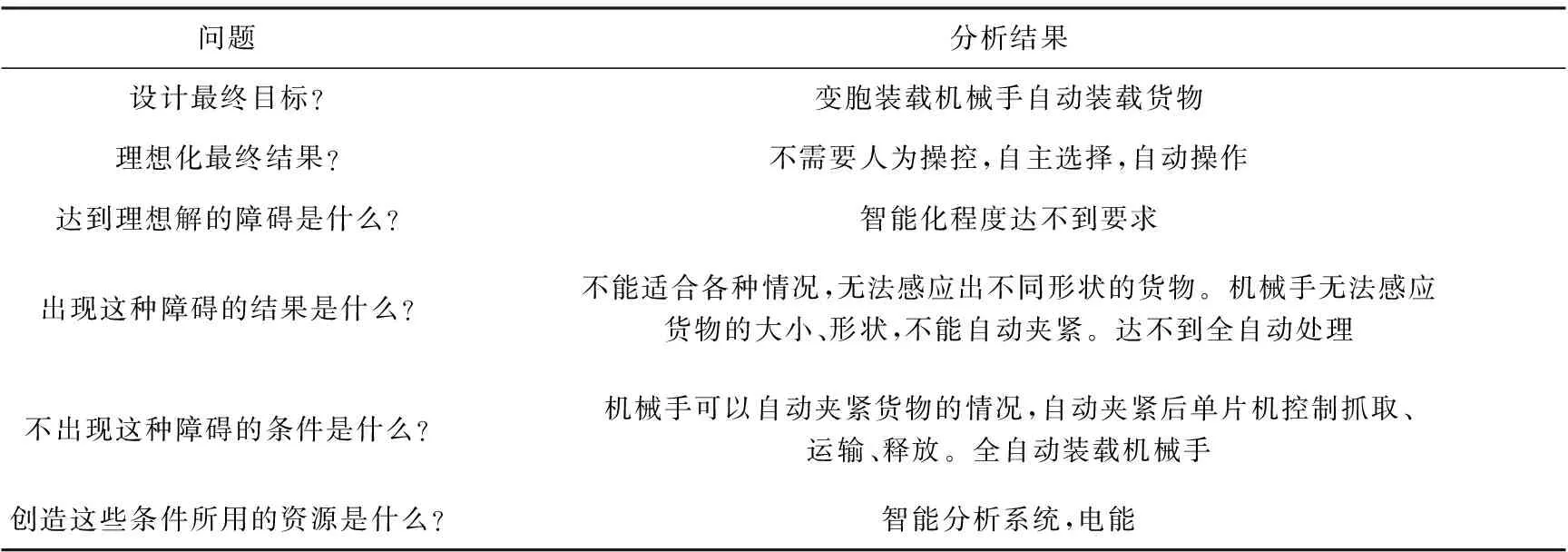
表2 最终理想解
2.2 技术矛盾
传统装载机械手结构复杂,多固定在一处使用,可移动的也比较大,不能完成不同阶段的工作任务,不宜应用于不同场合,而如果结构简单,则物体质量下降,稳定性及可靠性就会随之下降,构成了适应性及多用型和静止物体质量之间的技术矛盾。
优化参数为适应性及多用型,恶化参数为静止物体的质量,见表3所示。由矛盾矩阵表查到发明原理为:

表3 矛盾矩阵表01
采用15动态化原理,把物体分成三个部分,运动模块,驱动模块,装载模块,采用16部分超越原理,将变胞装载机械手用人力操控代替。稍微小于期望效果。
传统机械因为采用电气控制,导致操作流程复杂,使用前必须进行相关培训,不能方便地供所有的人随时使用,然而,简化了结构后,其可靠性又降低了,构成了操作可靠性和方便性之间的技术矛盾。
操作流程方便性为优化参数,可靠性为恶化参数,见表4所示。查矛盾矩阵表可知其发明原理为:

表4 矛盾矩阵表02
采用08重量补偿/互消,通过运用变胞原理,将其中几个构件的拓扑结构改变,提升了可操作性的同时又保持了其可靠性。
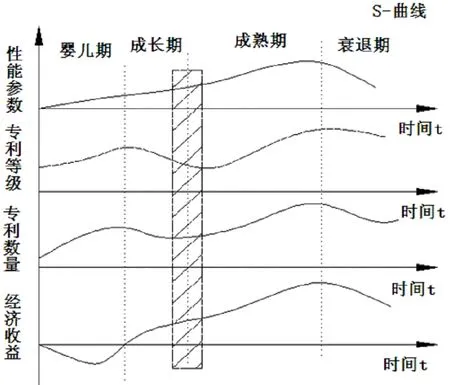
图3 生命曲线图
2.3 物场分析
方案模型见图4所示。
经过物场分析,货物的搬运是通过人双手直接搬运的,费时费力,并对人产生有害作用。需要添加一个场抵消有害作用,用以消除货物和人直接接触,将有害作用消除。
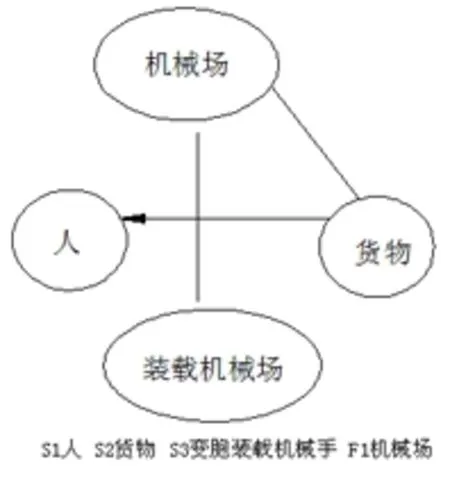
图4 方案模型
经过查表分析得到方案模型,引入另一个机械场——变胞装载机械手避免了人与需要装载的货物进行直接接触,从而消除有害作用。
2.4 技术方案整理与评价
经过分析设计出最终传动方案。
见图5所示。该装载机械手由电动机、主动杆、连杆系、大臂、滑块、弹簧、抓手等构成。电动机为可控电机,通过程序控制主动杆运动,实现机械手在工作空间内的装载工作。
未工作时,在弹簧弹力作用下滑块处于左极限位置,此时,构件4、5、6、8、9、10合并为一个构件。主动杆在电机驱动下顺时针转动,总个机构绕固定铰链A顺时针转动。当大臂与货物接触处于极限位置时,大臂和车体合并成为一个变胞构件,电机驱动主动杆继续顺时针转动,构件4、5、6、8、9、10分开,滑块向右移动,抓手转动抓紧物品;继续转动主动杆,抓手转动抓紧物品,滑块相应处于右极限位置,此时,大臂、连杆系、滑块和抓手又重新固结成为一个变胞构件,在电动机驱动下,大臂升起,物品被举起;推动车体移动,运输货物到指定位置;主动杆继续转动一个角度,大臂、连杆系、滑块和抓手仍固结为一个变胞构件,在大臂及物品的重力作用下,该变胞构件绕固定铰链A顺时针转动,物品被放下;继续转动主动杆,滑块向左运动,使抓手转动,释放物品。
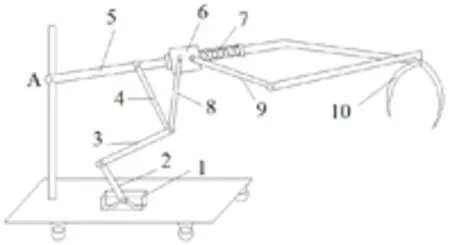
1-电动机 2-主动杆 3、4、8、9-连杆 5-大臂 6-滑块 7-弹簧 10-抓手
采用可控电动机驱动、连杆传动的变胞装载机械手,在装载过程中,只需一台电动机进行驱动,能够按不同阶段的工作要求改变机构的拓扑结构,适应不同场合需要。
3 结 语
应用Triz理论进行变胞装载机械手的方案设计,根据进化法则和创新原理设计出电动式变胞装载机械手总体传动方案,该方案能够克服传统液压式装载机械手惯性大、刚性差等缺点,且只需一如电动机就能完成全部装载任务。
