风力发电机组变桨距控制器的研究
2019-01-30段永强滕招波
吕 义,刘 漫,樊 姗,段永强,滕招波
(湖北民族大学信息工程学院,湖北 恩施 445000)
为了降低风轮负荷以延长其使用寿命,抑制风力发电机组输出功率波动以降低对电网的不利影响,大中型风电机组通常在额定风速以上采用变桨距控制,即通过改变风轮桨叶桨距角,进而相应改变风能利用系数,使机组输出功率保持稳定。但是,风力发电机组具有较大的转动惯量和较严重的非线性,且自然风速变化范围大,使得对变桨距系统控制困难。
由于风能的随机性和突发性,因此风力发电机组变桨距的控制会受到一定的影响,为此通过对变桨距控制器的研究来实现对输出功率的稳定控制。文献[1]介绍了采用PID控制器控制变桨距来消除系统误差提高输出功率的稳定性。文献[2]设计了模糊变桨距控制器使风力发电机组具有更好的动态性能从而降低输出功率的波动。然而常规PID控制器和模糊控制器对变桨距的控制效果并不是很理想。
对此本文提出了一种模糊自适应PID的控制方法。通过反馈响应对PID参数进行在线整定达到最优化,很好地解决系统动态与静态之间的矛盾。将模糊自适应PID控制器应用于风力发电机组变桨距系统中,基于Matlab/Simulink搭建额定功率为1 500 kW的风力发电机组模型进行仿真。结果表明模糊自适应PID变桨距控制器响应速度快、稳定性强、控制效果好。
1 变桨距风电机组控制原理
风力发电机组一般包括风轮、传动系统、制动系统、发电系统、变桨距系统、控制系统以及偏航系统等,其各部分是相互关联相互影响,风力发电机组整体结构如图1。

图1 变速风力发电机机组结构
1.1 风轮模型
根据贝兹理论分析可知风力发电机吸收功率为
Pr=0.5ρπR3VW3Cp(β,λ)
(1)
而风轮获得的气动扭矩为
Tr=0.5ρπR3VW2CT(β,λ)
(2)

通过有关风能利用系数Cp是叶尖速比λ和桨距角β的函数:

(3)
(4)
由近似函数可得图2所示Cp的曲线。
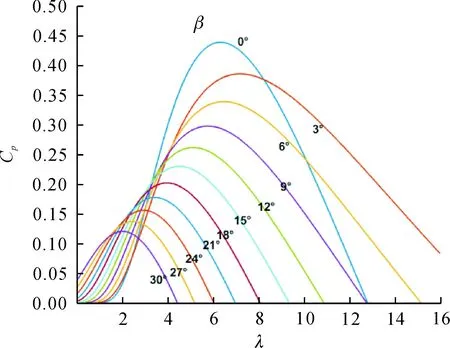
图2 风能利用系数Cp曲线
根据图2及公式计算得当桨距角的值取0°时,风能利用系数最大值等于0.593。而变桨距的目的是为了控制输出功率,当风速低于额定风速时,则需控制发电机的反转距来改变风轮转速,从而实现低风速时在风速大范围变化中最大风能捕获,当风速高于额定风速的时候,因为风力发电机传动是刚性轴此时发电机转矩无法平衡风机的气动转矩所以改变叶尖速比并不能实现,只能通过调节桨距角的增加来降低风能的利用系数Cp,使风力发电系统的输出功率保持额定功率的恒定状态。
1.2 传动系统的建模
传动系统是在风轮和发电机之间,风力发电机组的传动系统主要是由风轮转子、低速轴、增速齿轮箱、高速轴和发电机转子组成。忽略风轮和发电机部分的传动阻尼,简化传动系统运动方程为
(5)
式中:Jr为风轮转动惯量;n为传动比;Jg为发电机转动惯量;Tg为发电机的反转矩;ω为发电机转速,其中ωg=nω。
1.3 发电机的建模
风力发电机组中的发电机一般采用异步发电机,通过建立发电机的模型,发电机的反扭矩方程:
(6)

1.4 变桨距系统模型
目前风力发电机组的变桨执行机构通过发电机驱动来带动桨叶的运行,其控制过程相当于激励与响应的动态过程,可以简化为一阶数学模型:
(7)
公式(5)进行拉氏变换得:
(8)
式中:Tβ为变桨距执行机构时间常数,s;βr为参考桨距角,°;β为输出桨距角,°。
变桨距执行机构模型如图3所示。

图3 变桨距执行机构结构
2 模糊自适应PID控制器的设计
2.1 模糊自适应PID控制方案
在风力发电机组中主要是控制桨距角,随着风速不断增大且超过额定风速的时,这时桨距角打开从而控制发电机的转速变化直到发电机的功率因数达到最优值,最终达到稳定输出功率的目的。而只有在超过额定风速风机才启动变桨距控制,在风速小于额定风速变化到大于额定风速或从大于额定风速变化到小于额定风速时,只有当突变一定时间后,桨距角才会变化因此桨距角的调节具有一定延迟性。由于普通PID无法很好地控制时变性和非线性系统,一组整定好的PID参数远远不能满足系统的要求,引入模糊自适应PID控制器通过反馈能在线整定PID参数,并利用模糊逻辑算法根据一定的模糊规则对PID控制的比例,积分,微分系数进行实时优化以达到较为理想的控制,其结构如图4所示。

图4 模糊自适应PID控制结构
模糊自适应PID控制器以输出功率值与额定功率值的偏差e以及其偏差的变化率ec作为二维输入变量[3-4]。把两个变量输入模糊自适应PID控制器,根据模糊规则来调节桨距角得到参考值,再与实际的桨距角比较,将桨距角误差信号输入到控制器进行控制。在系统运行的过程中不断检测e和ec,经模糊推理得到3个修改参数△Kp、△Ki、△Kd,将此修改参数和系统前一次的PID参数进行性线叠从而来满足不同值的e和ec。
2.2 变桨距模糊自适应PID的设计
由于本文选用的风力发电机模型的输出额定功率为1 500 kW,选择输入偏差e的允许范围为[-400,400],桨距角允许的最大速率变化是3°/s。选择输入的论域范围为[-6,6],输出的论域范则围都为[-1,1],选择的输入变量偏差因子Ke=0.015,输入偏差变化率因子Kec=0.5。在Simulink中设计模糊输入隶属度函数为高斯型输出隶属度函数则为三角型,e和ec输入的隶属函数是一致,而△Kp、△Ki、△Kd的输出的隶属度函数是一致。模糊子集[5-9][NB,NM,NS、ZO,PS,PM,PB]分别表示负大,负中,负小,零,正小,正中,正大。
在不同的和的取值大小时PID的三个参数都要满足以下规则:
1)当e的值较大时,应取较大的Kp和较小的Kd同时取较小的Ki值;
2)当e的大小中等时,Kp值减小,Kd和Ki的大小要适中;
3)当e的值较小时,Kp与Ki都应取较大值。当|ec|出现较大时,Kd通常应取中等大小。
以PID中Kp、Ki、Kd三个参数的调整原则作为参考,在设计模糊自适应PID三个参数值时应充分考虑其整个系统运行的时变性,根据PID三个参数分别在控制过程中所起的作用以及它们之间的联系。因此△Kp、△Ki、△Kd三参数自适应的规则表分别如表1~表3所示。

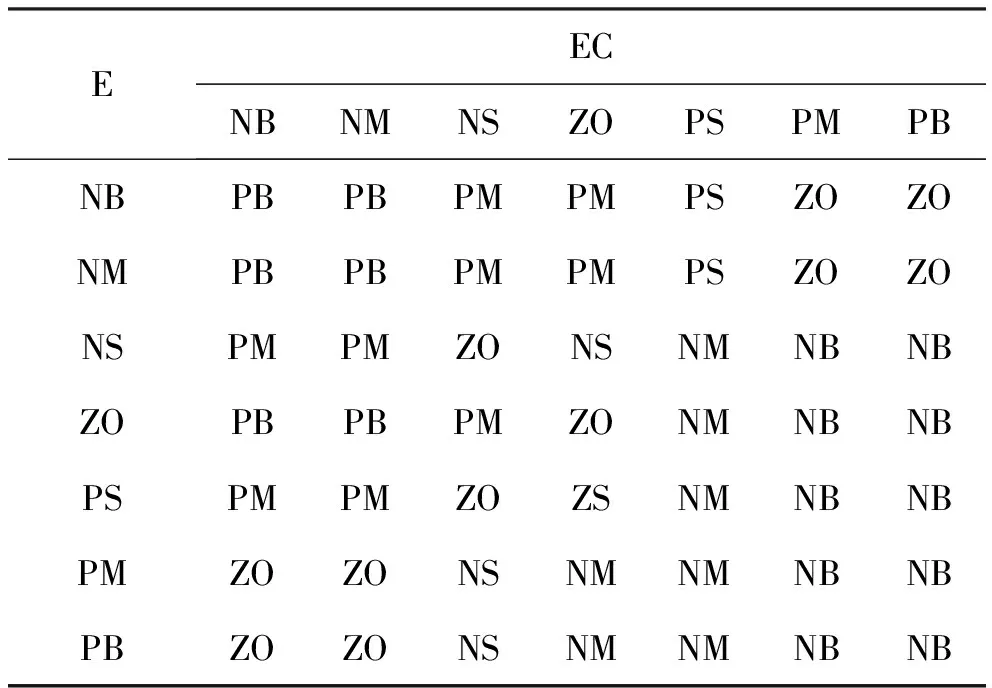
表1 △Kp的模糊规则表

表2 △Ki的模糊规则表

表3 △Kd的模糊规则表
本文提出模糊自适应PID变桨距控制器,其控制系统结构图如图5所示。
3 仿真实例
用于风力发电机组仿真的参数如下:空气密度ρ=1.22 kg/m3,额定功率P=1 500 kW,额定风速Vr=7.602 7 m/s,风轮额定转速Wr=19.8 r/min,切入和切出风速分别为3 m/s和25 m/s,叶轮半径R=38.5 m,齿轮传动比n=75.76,发电机同步转速W1=1 500 r/min,发电机电压690 V。

图5 风力发电机变桨距控制系统结构
当风速变化曲线如图6的时候,因为额定风速为7.6 m/s,所以此风速仿真曲线都高于额定风速为高风速,当风力发电机组在高风速运行的时候,此时风力发电机组的桨距角会打开从而达到控制风力发电系统的目的。图7为PID控制的仿真结果,图8为模糊自适应PID控制的仿真结果。
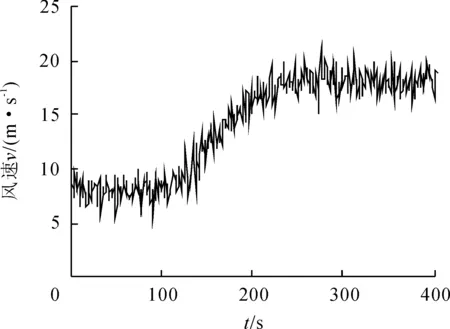
图6 风速变化曲线

图7 PID控制仿真结果

图8 模糊自适应PID仿真结果
对模糊自适应PID控制的风力发电机,在高风速的情况下,模糊自适应PID控制器可以快速实现小范围桨距角调节,输出功率的波动也很小从而使系统更加稳定地运行。
通过仿真结果可知,得出相比PID控制,模糊自适应PID控制的变桨距,桨距角变化的幅值区间小,输出功率较平稳,风轮转速更稳定更趋近额定值,从而达到额定功率附近的稳定输出。
4 结 语
由于整个风力发电系统是一个复杂的非线性系统,通过模糊自适应PID来控制变桨距和常规PID控制变桨距进行仿真比较,相较于常规PID的控制模糊自适应PID的控制提高了系统的灵活性和适应性,具有较好的抗干扰能力与鲁棒性能,因其控制结构简易使其在工业上具有优良的应用价值。
