基于蚁群算法的主干航线网络动态规划
2019-01-28谢春生李少华戴玉洁
谢春生,李少华,戴玉洁
(中国民航大学空中交通管理学院,天津 300300)
空中交通网络是承载航线运输的重要交通设施,是连接机场与机场之间的纽带。随着航空业的快速发展,空域容量日益成为限制民航业发展的瓶颈。传统主干航线通常受地面导航设备限制,一般采用向背台方法设计,而空域限制区开闭、天气影响及空军活动,对航线的影响较大。现有的航线规划方法灵活性差、周期长,延误或取消航班大大降低了空域利用率。绕飞不利天气,会增加飞行油耗、提高运行成本,同时也会导致碳排放量的增加。随着民航新技术的不断发展,尤其是基于性能导航(PBN)技术的出现,信号覆盖范围不再受限,航线的规划空间可包括整个空域。因此,动态航线网络规划是提高空域利用率的有效措施,对提高航线安全性和经济性,推行节能减排的快速实施有重要意义。
主干航线网络规划的本质是路径规划,对于路径规划的研究方法主要分为:①基于概略图的路径规划[1];②基于栅格的路径规划[2];③基于类比的路径规划[3]。这些方法主要通过结合不同的启发式算法实现最优的路径规划。主干路径网络规划在煤炭运输[4]、集装箱运输[5]等方面取得丰硕的研究成果,可提供一定的理论基础。
首先,根据限制区、危险区特点,建立障碍区模型,利用图论思想,采用Maklink线对空域进行重新划分;然后,利用蚁群算法,规划出同时满足安全性和经济性的主干航线,根据障碍区的动态开放,提出一种主干航线网络的动态规划方法;最后,以中南管理区部分空域为例,规划出多条主干航线网络,并验证算法的有效性。
1 基于Maklink线的空域模型建立
1.1 障碍区模型
将限制区、危险区、禁区包含的区域定义为障碍区。根据障碍区的开放时间,将障碍区分为静态障碍区和动态障碍区。静态障碍区是指长期处于关闭状态,不允许飞行活动的区域;动态障碍区是指开放时间不固定,在限制时间以外,允许飞行活动的区域。高大障碍物是指地面所有影响飞行安全障碍物的统称。
由于障碍区划设的形状不规则,大多以凸多边形为主,将圆形、凹多边形的障碍区,人为转换为凸多边形,为构建空域模型提供基础。
1.2 Maklink线构造
假设空域C内包含n个障碍区Oi,且均为凸多边形,第i个障碍区表示为Oi={(x1,y1),(x2,y2),…,(xk,yk),…,(xK,yK)},其中,(xk,yk)是 Oi顶点 Vk的横、纵坐标。整个空域环境可表示为C={O1,O2,…,On},随着障碍区的变化而动态改变。动态障碍区Maklink线的构造流程,如图1所示。
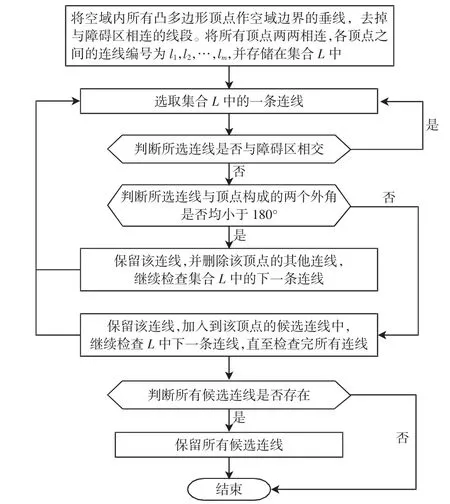
图1 Maklink线构造流程图Fig.1 Maklink construction procedure
1.3 空域模型建立
主干航线动态规划的解空间是高空空域,研究主干航线规划的首要条件是建立空域图模型。因此,针对主干航线设计问题,结合图论思想建立模型C,如图2 所示。其中,O1,Ok,OK为障碍区,(as1,ae)、(as2,ae)表示起点为as1、as2,终点为ae的初始航线。
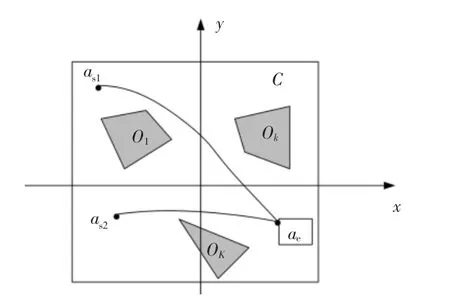
图2 空域模型Fig.2 Airspace model
1.4 构造航线初始解
航线初始解是以Maklink线中点为解空间的前提下,采用Dijkstra算法[6]搜索一条可行航线R0,即

其中:as为航线起点;ae为航线终点;ui为Maklink线的中点。
2 独立主干航线规划模型
在三维空间范围内搜索出有效的航路点,工作量大、执行缓慢,较难规划出主干航线网络。因此,将三维航线规划问题简化到二维平面内[7],将问题转化为最短路径的求解,作为航线规划的目标函数。
2.1 目标函数
航线路径的长短对于主干航线网络水平剖面的经济性有直接影响,将主干航线R投影至二维平面,其中,R={S1,S2,…,Sn},Si表示航段,对应的航段长度di=|Si|,用pi和pi+1分别表示航段Si的起点和终点。定义投影后总航线距离为

2.2 约束条件
1)航段水平越障
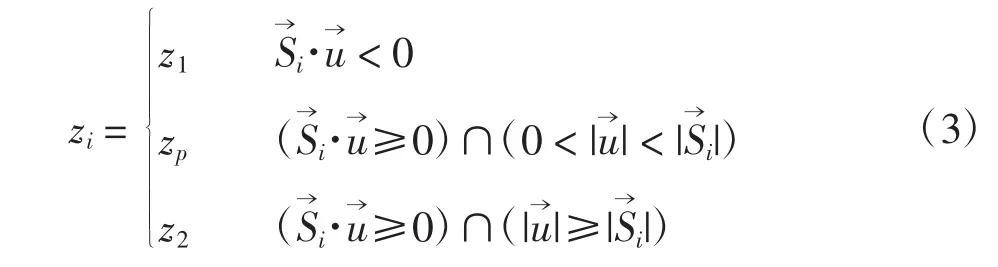
空域内静态障碍区多为无法飞越障碍物,在设计航线时需要绕开此类障碍物,按照规章要求,给出足够的安全裕度z0。假设航段与障碍区的距离为zi,根据凸多边形顶点与航段的相对位置,定义顶点Vk与航段Si的距离如下

2)航线最低安全高度
复杂地形是影响航线规划的主要考虑因素,航段的最低安全高度直接受地面高大障碍物限制,因此,航段需与各高大障碍物之间有一定的垂直安全裕度MOC。假设空域内有m个障碍物,表示为B={b1,b2,…,bm},其中,bj=(xj,yj,hj)。
航线的水平保护区是以航段Si的投影航迹si为中心航线,绘制的宽度为W,长度为|si|的矩形区域[8]。判断障碍物bj是否在保护区内,如果在,则将障碍物bj置于该保护区障碍物集合N中。因此,航线最低安全高度需满足如下条件

其中,hM=hmax{N}+MOC,hmax{N}为该保护区中障碍物的最大垂直距离。
3)航段转弯角度
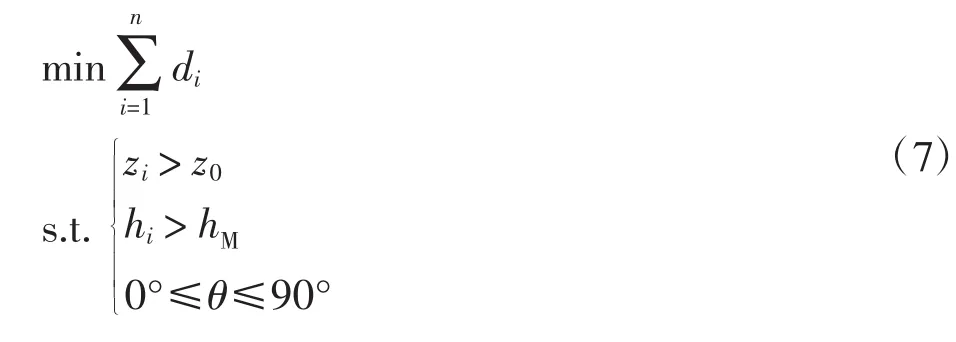
受飞机性能及飞行员操纵限制,飞机机头的偏转角度θ应满足如下条件

综上所述,建立独立主干航线模型如下
3 蚁群算法的动态规划
蚁群算法是用于解决复杂规划问题的全新启发式算法[9],航路点的水平搜索规则可实现水平方向的经济性最优。假设x只蚂蚁从起点as爬行至终点ae,在到达航路点pi时构造下一航路点步骤如下。
1)水平剖面将Maklink线均分,水平离散度为a,因此,可表示为 l1,l2,…,la。
2)li表示为下一个以概率phozi进行选择的水平方向节点。phozi的计算如下

目前,国内外针对空域主干航线网络规划问题的研究尚不成熟。结合国内公交网络设计方法,采用“逐条布线,规划成网”的方法进行航线网络的动态规划。根据网络设计要求,在众多可行备选线路集中逐条布设,逐渐迭加成网,该方法简单、可操作性较强。
由于空域中存在的动态障碍区开放时间不固定,而障碍区的动态变化对整个主干航线网络的规划有很大影响。因此,航线网络的布局需要根据障碍区的变化及时调整,从而实现空域容量最大化。采用图论思想将空域划分,根据动态障碍区的变化,可通过重新调整Maklink线的布局将空域重新划设,进而利用蚁群算法重新进行航线网络规划。
4 实例分析
以中南地区部分空域为例,验证主干航线网络规划方法。考虑 4 个危险障碍物分别为 b1、b2、b3、b4;8个高大障碍区分别为O116、O117、O118、O119、O120、O121、O122、O127。其中,O127为凹多边形,将其转化为凸多边形。表1给出待优化的起点及终点,其中,航线起点均为空域内导航台或报告点。

表1 待优化主干航线起点与终点Tab.1 Starting point and final point of trunk route to be optimized
4.1 独立主干航线规划
以航线H61为例,首先根据1.2节构造Maklink线,将空域划分为若干区域,然后构造航线初始解,如图3虚线所示。
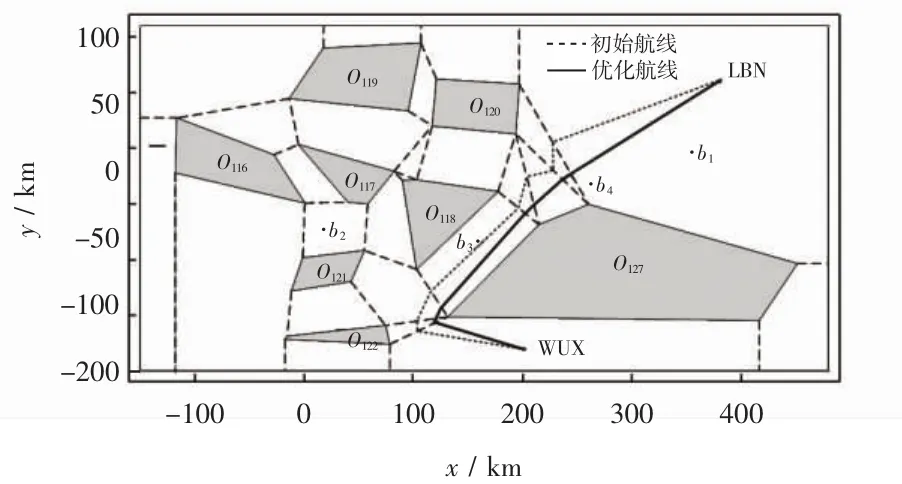
图3 主干航线H61规划Fig.3 Trunk route H61 planning
假设障碍区安全距离z0=5 km,障碍物超障裕度MOC=600 m,航线保护区宽度W=25 km。选取水平离散度a=10,蚂蚁数量x=30,迭代次数t=500,信息素重要程度因子α=6,节点启发值β=1.1。采用蚁群算法优化初始水平航迹,如图3所示。划设航线安全保护区,确定b4为影响安全的关键障碍物,海拔高度为2 680 m,根据式(5)确定航线最低安全高度3 280 m。表2给出航线H61优化前后结果比较。

表2 航线H61优化结果Tab.2 Optimized Route H61
从表2可看出:优化后的航线距离d较优化前缩短了58.6 km,经济性得到很大提高;优化后的机头偏转角度θ变化幅度在前4段都较之前有所减小,更利于飞行员操作。同时采用以Maklink线中点为基点,两侧内缩25 km的算法,保证了与障碍区之间的安全间隔,同时满足水平安全间隔和转弯角度要求。
4.2 主干航线网络动态规划
利用独立主干航线的规划方法,分别优化A151和H79航线,图4给出了主干航线规划图。障碍物b2是A151航线关键障碍物,由式(5)确定航线最低安全高度为2 652 m。根据国内航空资料汇编(NAIP)可知,O117为动态障碍区,每日 08:00~24:00 关闭。因此,需重新规划航线网络,如图5所示。O117对航线A151有影响,从表3中可看出,关闭障碍区O117后,优化后的航线距离比之前减少12 km。同时,优化后的机头偏转角度θ继续保持在0°~90°之间,满足飞机性能及安全性的要求。
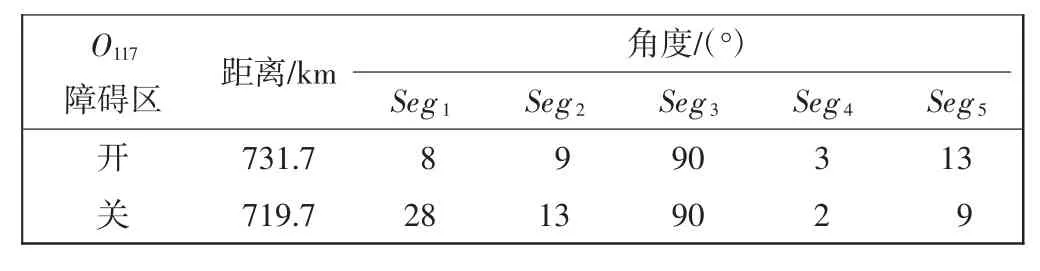
表3 A151优化结果Tab.3 Optimized Route A151
5 结语
随着碳交易的日益推进,对节能减排的迫切需求,主干航线网络设计在保证空中交通运输安全的同时,兼顾效率及效益。首先建立障碍区模型,采用Maklink线将空域重新划分;然后,利用蚁群算法规划出同时满足安全性和经济性的主干航线;根据障碍区的动态开放状态,提出一种空域内主干航线网络的动态规划方法,最终实现整个空域的主干航线网络动态规划。

图4 主干航线网络规划图Fig.4 Trunk ronte network planning
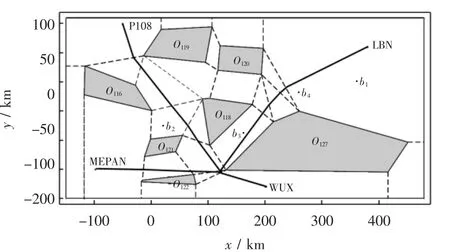
图5 主干航线网络动态规划图Fig.5 The result of trunk network dynamic planning
