基于超级电容器的电动汽车永磁同步电机制动能量回馈控制研究
2019-01-27牛联波张清枝
牛联波,张清枝
(新乡学院 机电工程学院,河南 新乡453003)
永磁同步电机结构简单、体积小、重量轻,相比于传统的直流电机,永磁同步电机没有换向器和电刷,维护相对简单,且可实现高速、大转矩输出[1-2]。相比于传统的感应电机,永磁同步电机不需要无功励磁电流,因而效率、功率因数高,力矩惯量比大,定子电流和定子电阻损耗小,且转子参数可测,控制性能好[3-4]。研究表明永磁同步电机在中小功率范围内具有更高的转矩密度和效率,同时还具有无转子电流、矢量控制方法简单、转子损耗较小、转子的制造成本低等优点。因此永磁同步电机被广泛应用到电动汽车上作为驱动电机。
电动汽车在加速、负载突然增大或者爬坡时,放电电流过大,使得蓄电池压降增大、蓄电池发热严重,这种极端的放电环境会加速蓄电池的老化[5-6]。此时如果利用超级电容器协助供电,那么超级电容器工作在升压模式下且协助蓄电池大电流供电,不仅可以满足汽车的供能需求,还可以保护蓄电池。
电动汽车在制动过程中浪费了大量能量,这些能量通过制动器转化为热能消耗掉了。研究表明,大约有1/3的能量消耗在制动过程中[7]。电动汽车在下坡再生制动时,超级电容器工作在降压模式下,制动能量可以回馈到超级电容器,这对提高电动汽车工作效率,降低电动汽车能耗,缓解能源和环境压力具有重要意义。
1 永磁同步电机驱动系统建模
1.1 永磁同步电机建模
永磁同步电机考虑铁心损耗时的d、q轴等效模型可参考文献[8-9],稳态情况下永磁同步电机的电压平衡方程组为
d、q磁链的表达式为

电磁转矩方程为
在以上式子中:Ud、Uq为定子 d、q 轴电压;id、iq为定子d、q轴电流为定子等效的d、q轴转矩电流;为定子d轴磁链,为定子q轴磁链;为转子电角速度为永磁体产生的磁链;Ld、Lq为定子d、q轴自感;Ra为定子每相绕组的电阻;p为电机极对数;Te为电机电磁转矩。
1.2 超级电容器模型
超级电容器等效电路模型如图1所示,由图1可得

式中:ic为超级电容器端电流(A),io为超级电容器自放电电流(A),R1为超级电容器充电电阻(Ω),R2为超级电容器自放电电阻(Ω),C为电容(F)。

图1 超级电容器等效电路模型
1.3 电池模型
电池建模主要用来分析电池的充放电动态特性。锂电池模型一般由电阻、电容组成的电路模型来描述,常用的等效电路模型如图2所示。

图2 锂电池常用的等效电路模型
由图2可知,等效电路动态方程组为

式中:Rs为欧姆内阻;Rt和Ct组成一个 RC网络,uoc为开路电压,上述变量都与电池剩余电量SOC有关;uc为 RC网络的电压;ub为端电压;ib为输出电流。
2 超级电容器辅助控制的能量回馈分析
超级电容器协助供电和回收能量的原理图见图3。
当电动汽车爬坡或加速时,蓄电池的瞬时输出电压变低,控制系统工作在升压模式下,当MOS管VT01控制端施加高电平时,VT01导通,超级电容器的能量存储在电感L中;当VT01控制端施加低电平时,VT01断开,电感L中储备的能量通过二极管VD02给电容C2充电并协助蓄电池一起供电。
当电动汽车工作在再生制动发电时,蓄电池的瞬时输出电压变高,控制系统工作在降压模式下,当MOS管VT02控制端施加高电平时,VT02导通,能量从电池组中通过电感L给超级电容器充电,充电过程中电感L储存部分能量;当MOS管VT02控制端施加低电平时,VT02断开,电感L中储存的能量传送到超级电容器,实现了制动能量的回收利用。具体能量流向控制流程如图4所示。

图3 超级电容器协助供电控制原理图

图4 能量流向控制流程图
3 仿真结果分析
搭建的超级电容器协助供电的双电源系统Simulink仿真模型如图5所示,电源系统中超级电容器的额定电压为48 V,蓄电池额定电压为300 V。当电动汽车的驱动系统工作在大功率状态(起步、上坡、提速等)时,超级电容器协助蓄电池供电,其端电压经DC/DC升压斩波后输出电压稳定在300 V,这时触发VT01的脉冲占空比为84%;当再生制动发电时,电容C1向超级电容器充电,蓄电池两端的电压经DC/DC斩波降压后输出电压稳定在48 V,这时触发VT02的脉冲占空比为16%。

图5 超级电容器协助供电的双电源系统仿真模型
当VT01的触发频率为5 000 Hz,电感L=0.000 1 H,C=0.000 2 F,C1=0.000 1 F时,升压斩波电压Ucu仿真结果如图6所示,降压斩波电压Vc仿真结果如图7所示,此时超级电容器的荷电状态如图8所示。

图6 升压斩波仿真结果
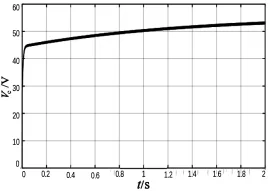
图7 降压斩波仿真结果
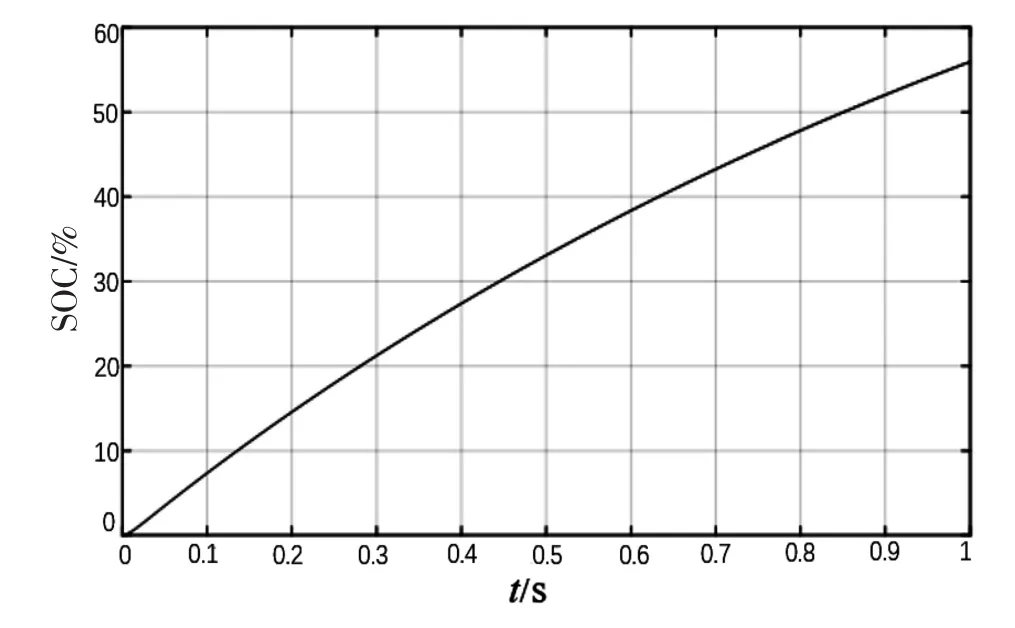
图8 超级电容器的荷电状态
搭建的超级电容器协助供电的永磁同步电机控制系统的Simulink仿真模型如图9所示。仿真模型主要包括双电源供电系统、DC/AC逆变系统和永磁同步电机模块、永磁同步电机控制电路子系统。

图9 永磁同步电机控制系统仿真模型
转矩设置为6 N·m,制动减速时电机转矩响应如图10所示。由图10可以看出:在启动瞬间电机需要克服转子惯性和系统摩擦等,启动转矩较大,在0.08 s时转矩达到稳定,电机稳定运行。由图11可以看出:在0.25 s时转速降低,经过0.05 s后转速重新达到稳定。
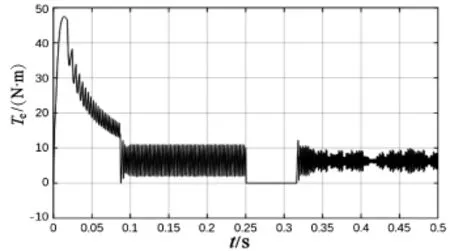
图10 制动减速时电机转矩响应曲线
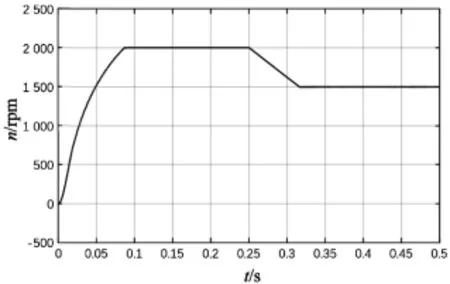
图11 制动减速时电机转速响应曲线
为了更好地验证电动汽车的驱动、调速性能,电机转速由设定的1 800 rpm增至2 500 rpm,其他参数不变,在上坡加速的情况下,再次进行仿真实验,结果如图12和图13所示。
设置转矩为负值,将电机作发电机,模拟电动汽车下坡运行的情形,得超级电容器的荷电状态如图14所示。

图12 上坡加速时电机转速响应曲线

图13 上坡加速时电机转矩响应曲线

图14 制动能量回收中超级电容器荷电状态变化
由图14可以看出:电机工作在下坡再生制动发电状态时,系统工作在降压模式下,制动发的电给超级电容器充电使其电池荷电状态从45%升到95%左右,完成了能量的回收和利用。
4 结论
本文对电动汽车驱动系统永磁同步电机、超级电容器和电池进行建模,针对续航能力和蓄电池保养问题,设计了双电源协同供电系统,在超级电容器协助供电模式下,避免了蓄电池大电流充放电。同时,充分利用超级电容器的功率密度高与永磁同步电机机电能量转化效率高等特性,在制动时将多余的动能转化成电能给超级电容器充电,这样增加了续航里程。
