基于正交试验与层次分析法的柔顺平行四杆机构稳健优化设计*
2019-01-23伍建军向健明张巍巍王子宁罗继辉
伍建军,向健明,张巍巍,王子宁,罗继辉
(江西理工大学 机电工程学院,江西 赣州 341000)
0 引言
柔顺机构作为一种小体积、无机械摩擦、无间隙和高灵敏度的传动结构[1],广泛应用于各种要求小角位移、高精度转动的场合。近年来,柔顺机构受到光学领域研究人员的青睐,如快速倾斜反射镜、光学元件的调整座等[2-3]。由于柔顺机构柔度稳健性往往受到结构设计参数交互作用影响,性能产生波动,造成柔顺机构在高尖端领域柔度稳健性难以把控。故给柔顺机构的柔度找出一个较优且合理的可控参数影响分析方法,成为柔顺机构的研究热点。而国内外学者对柔顺机构主要是研究功能性拓扑优化,而对于功能的抗干扰、稳健性优化设计方面相关文献较少。文献[4]通过构建面光滑的高精度有限元模型,求得梯度解和位移解,并没有考虑铰链柔度稳健优化设计的问题,但在实际应用中柔度是必须被考虑的。文献[5]建立灰色关联分析模型,结合田口方法研究深切口柔性铰链稳健性优化设计,仅为单个目标值的稳健性分析。本文基于正交试验结构设计参数对试验值的影响,通过建立层次结构模型定量分析设计结构参数对柔度的影响,分析各因素和水平对其柔度的影响权重,从而找出柔顺平行四杆机构的柔度影响因素的主次顺序和水平优化组合,为柔顺机构柔度稳健性优化设计提高一个较新的思路。
1 柔性机构运动模型及综合权重计算模型建立
1.1 柔顺平行四杆机构柔度运动模型
柔顺平行四杆机构见图1所示,由刚性梁与柔性梁等几部分组成,当其受到外界载荷的时会发生微弹性形变,其柔度反映机构的形变能力,柔度大其形变能力越大,柔度小其形变能力越小[6-7]。根据实际工况模拟,施加一定的载荷F,总体参数优化设计需要综合考虑柔性梁的长度t,刚性梁的长度l,柔性铰链宽度c和机构的厚度h。

图1 柔顺平行四杆机构
1.2 基于田口方法与层次分析法综合权重计算模型
根据正交试验表,任一列各水平出现的次数相等,从而可以综合比较该因素不同水平对试验指标的影响情况。各水平对应的试验指标极差分析常用于确定因素的主次地位,极差越大,对应的因素影响越大;极差越小,对应的因素影响越小。如正交试验分析L4(23)见表1,因素数α为3,水平数β为2[8]。

表1 正交试验表
表1中,Kij为第i列因素j水平对应的试验指标和;kij为第i列因素j水平对应的试验指标平均值kij=Kij/mi;mi为第i列因素同一水平出现的次数;Ri为第i列因素试验指标极差。
针对多试验值正交试验,可以通过建立层次结构模型[9-10]定量分析设计结构参数对柔度的影响,从而找出柔顺平行四杆机构的柔度影响因素的主次顺序和水平优化组合。
(1)试验指标值对目标层权重
通过比较指标的相对重要性,建立比较判断矩阵A,构建并求解判断矩阵A的特征方程,对比其不一致性进行判断,其一致性指标CI与一致性比率CR如式(1)、式(2)所示。
CI=(λmax-n)/(n-1)
(1)
CR=CI/RI
(2)
其RI取值如表2所示。

表2 随机一致性指标取值
(2)正交试验指标值及水平权重试验指标进行α因素,β水平正交试验分析,建立指标因素和水平层次结构。

(3)
且水平层对因素层的权重矩阵,如式(4)所示。
(4)
对于试验指标i,各水平对指标i的权重矩阵为Mi=Ui·Ti
(3)确定综合权重
根据以上计算得权重矩阵,各层权重矩阵相乘可以得到正交试验因素及水平对目标值的影响权重,对于具有n个指标的目标值,试验水平和试验因素对目标值的权重矩阵如式(5)、式(6)所示。
S=[M1,M2..Mn]·W
(5)
P=[T1,T2..Tn]·W
(6)
2 柔顺平行四杆机构柔度稳健性优化设计
根据四杆机构运动模型可知,取其机构各柔度y1、y2、y3以及信噪比为稳健性优化的指标值,然后引用文献[11]选取65Mn作为柔顺平行四杆机构的设计材料,弹性模量E=2.1×1011Nm-2,泊松比μ=0.3,柔性梁的长度t,刚性梁的长度l,柔性铰链宽度c和机构的厚度h的不同水平值进行正交试验,如表3所示,选取三个具有代表性载荷F作为噪声因素,如表4所示。
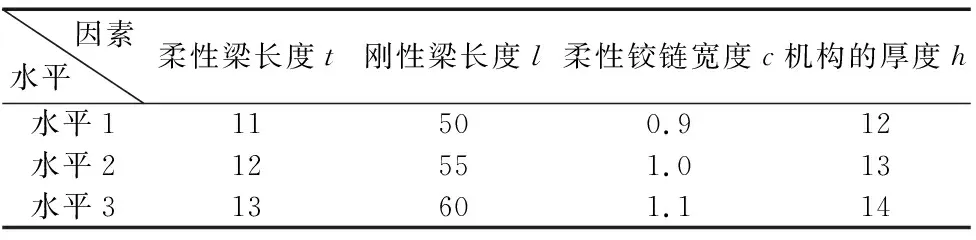
表3 柔顺平行四杆机构结构尺寸因素水平表(单位:mm)

表4 噪声因素水平表
由上所知,机构各柔度值为y1、y2、y3以及信噪比[12]对于柔度稳健性的相对重要程度,建立判断矩阵如下所示。

求解归一化处理特征向量如下所示,且CR<0.001,判断矩阵的不一致性程度在容许范围之内。
根据表3试验因素与表4因素不同水平表建立正交试验表L9(34),其通过模拟得出试验值如表5所示。

表5 正交试验设计与试验值
为确定各因素的主次顺序以及优化水平组合,进行极差分析,如表6所示。

表6 试验指标值极差分析
根据表6以及公式(3)计算得各尺寸因素对指标试验值得影响权重,得出尺寸因素对其稳健性影响权重Q,如表7所示。

表7 各尺寸因素对试验值的影响权重
根据式(4)~式(6)分别计算各参数水平对试验指标值的影响权重Mi,然后得到各水平对机构稳健性的影响权重P,如表8所示。

表8 各水平对试验值的影响权重
由表7可知,平行四杆机构柔度影响主次顺序依次为柔性铰链宽度c,刚性梁的长度l,柔性梁的长度t和机构的厚度h。然后通过表8对比各尺寸因素下的不同水平影响权重值,得出最优参数组合为铰链宽度c=0.9mm,刚性梁的长度l=60mm,柔性梁的长度t=13mm和机构的厚度h=12mm,得出的最优参数组合与文献[11]的参数组合一样,与最初设计尺寸参数c2l2t2h2对比稳健优化设计后的增益量为5.56dB,但是文献[11]是由信噪比图对比抽象定性所得的最优参数组合,而本文是通过层次分析法综合权重求出了尺寸参数不同水平下的影响权重,来评价每个尺寸参数在不同水平下的对于柔顺平行四杆机构的影响性,更加具有直观性和有效性,能够更加清晰的进行定量分析。
3 结论
本文采用了田口方法与层次分析法优化柔顺平行四杆机构的柔度及信噪比,并得到了最佳参数组合,且通过对比验证,其柔度以及信噪比得到提高,柔顺平行四杆机构稳健性得到优化。田口方法对于单目标问题可进行较好的优化,而对于多目标问题有一定局限性,因此结合层次分析法建立综合权重计算模型进行优化分析,该方法可以有效地解决柔顺机构稳健性优化设计的问题,并且具有普适性,提供了一种较好的解决途径,有较大的推广实用价值。
