基于下一代自动驾驶汽车智能挡风玻璃的“Trisomy”概念设计
2019-01-22
1 背景及概念界定
2012年5月,美国内华达州机动车辆管理部门(DMV)为谷歌自动驾驶车颁发了首例驾驶许可证。同年9月,加利福尼亚州出台法案宣布从2015 年起允许自动驾驶汽车上路行驶。2017年2月,谷歌公布财报时做出一项重大宣布:将于2018年完成其无人驾驶Waymo出租车业务的商业化。而Waymo方面也已经确认,将于2018年增产数千辆自动驾驶汽车,投入到出租车的运营中。去年年底,Waymo的自动驾驶车队数量新增了600辆,谷歌还把测试扩展到美国的25个城市。
在中国,第一百辆百度无人驾驶巴士阿波龙已经下线,包括滴滴、Uber、Lyft等科技公司在内的共享打车服务平台都已经推出了包括点对点的短程服务、团队运输以及穿梭巴士服务等。
在政策方面,2017年12月,国家发改委发布了《智能汽车创新发展战略》的文件,这个文件意味着,智能汽车在中国的发展未来将上升到国家战略层面,也意味着高级别自动驾驶包括无人驾驶未来一定会实现。
在大众的观念上,市场研究公司益普索(Ipsos)的一项调研显示,全球只有13%的消费者表示他们永远不会使用自动驾驶汽车,30%的人很乐意尝试并迫不及待地想要这样做[1]。
什么是自动驾驶汽车?美国国家公路交通安全管理局(NHTSA)根据国际自动机工程师学会(SAE International)发布的一种分类系统,修编并提出正式的自动驾驶五等级分类系统:
等级0:人工驾驶。驾驶随时掌握着车辆的所有机械、物理功能,仅配备警报装置等等无关主动驾驶的功能也算在内。
等级1:辅助驾驶。驾驶人操作车辆,但个别的装置有时能发挥作用,如电子稳定程式(ESP)或防锁死刹车系统(ABS)可以帮助行车安全。
等级2:半自动驾驶。驾驶人主要控制车辆,但系统阶调地自动化,使之明显减轻操作负担,例如主动式巡航定速(ACC)结合自动跟车和车道偏离警示,而自动紧急煞停系统(AEB)透过盲点侦测和汽车防撞系统的部分技术结合。
等级3:高度自动驾驶。驾驶人需随时准备控制车辆,自动驾驶辅助控制期间,如在跟车时虽然可以暂时免于操作,但当汽车侦测到需要驾驶人的情形时,会立即回归让驾驶人接管其后续控制,驾驶必须接手因应系统无力处理的状况。
等级4:超高度自动驾驶。驾驶人可在条件允许下让车辆完整自驾,启动自动驾驶后,一般不必介入控制,此车可以按照设定之道路通则(如高速公路中,平顺的车流与标准化的路标、明显的提示线),自己执行包含转弯、换车道与加速等工作,除了严苛气候或道路模糊不清、意外,或是自动驾驶的路段已经结束等,系统并提供驾驶人“足够宽裕之转换时间”,驾驶应监看车辆运作,但可包括有旁观下的无人停车功能。(有方向盘自动车)
等级5:全自动驾驶。驾驶人不必在车内,任何时刻都不会控制到车辆。此类车辆能自行启动驾驶装置,全程也不须开在设计好的路况,就可以执行所有与安全有关之重要功能,包括没有人在车上时的情形,完全不需受驾驶意志所控,可以自行决策(无需方向盘自动车)[2]。
由于等级0至等级2的自动驾驶程度较低,且不会对我们的生活方式产生革命性的影响,故不在本文的讨论范围内,本文中的“自动驾驶汽车”主要指高度自动驾驶汽车(等级3)以上的汽车。
从现实意义上来看,百度已经拥有了生产L4级别无人驾驶巴士的量产能力。2025年,中国便会开始推广高级别的自动驾驶和无人自动驾驶。2030年,中国的高级无人驾驶,也就是四级、五级的无人驾驶车辆便会进入产业化[3]。仅以三级以上的自动驾驶汽车作为讨论对象,并不影响其现实意义。
2 概念设计:自动驾驶汽车将成为新媒介
因尼斯和麦克卢汉把媒介作为社会发展和社会形态变化的决定因素。麦克卢汉曾经提出过一个著名的论断:“媒介即讯息。任何媒介(即人的任何延伸)对个人和社会的任何影响都是由于新的尺度产生的,我们的任何一种延伸(或任何一种新的技术):都要在我们的事务中引进一种新的尺度。”而自动驾驶汽车便提供了一个新的尺度,将会成为一种新的媒介。
2.1 设计理念
首先,我们重新定义汽车:造成三个维度改变的容器。
在传统概念上,汽车是花费一定的时间实现空间移动的工具,这就只涉及到时间和空间两个维度。我们在时间和空间两个维度的基础上,增加了“情绪”这一新的维度。我们把这一概念叫做“trisomy”。
现在的汽车是一种代步工具,基于我们有从一个空间到另一个空间的需求,同时需要花费一定的时间,然而值得注意的是,汽车上时空移动的体验会使我们的情绪发生一定的变化。在传统的驾驶体验中,我们的情绪受到了空间、环境和路途时间的影响。我们希望把时间空间的改变影响情绪变化,转变为根据情绪的变化定义时间和空间的改变。
而在可以料想的未来,随着交通和通讯技术的进一步发展,汽车带来的空间移动将可能不是必要的:我们想要到达的环境可以通过投影让我们置身其中;另外产生位移的也不一定依然是汽车,也许是公路本身或是传送器。汽车的意义变成了花费一定的时间产生情绪的改变,而不是地点的改变。因此对于电视在自动驾驶汽车的应用的设计,我们将更加关注汽车体验给情绪造成的影响。

图1 “trisomy”的概念模型
在“trisomy”概念的基础上,我们提出了优化乘车情绪体验的——基于下一代自动驾驶汽车智能挡风玻璃的新娱乐模式。“智能挡风玻璃”结合玻璃的特性,具有智能交互屏幕的特性,可自动摄取周边映像信息,使人与环境进行内容互动,创造独特的车内智能新媒体环境。从而革新驾车体验,颠覆车内娱乐体验。
这一概念也可以应用于其他相似领域。
2.2 设计元素
我们将寻找自动驾驶汽车特征、人的需求、技术实现三个方面的交叉点,使得这一交叉点可以与智能挡风玻璃融合,成为一种可付诸实践的产品构想。
图2 车内屏幕的设计元素,这三者的交集将成为智能挡风玻璃的创新方向
2.2.1 人的需求
1)独处的需要。社会学家 Goffman 认为:当他人存在的时候,人们就会感到有义务塑造或约束自己的行为,以适应所处社会文化的规范。因此,个体行为会受制于社会以及自我加诸的压力,使自己变得拘谨[4]。相反一个人的时候,个体可以使自己从他人的监视与要求中释放出来。人本主义心理学的创始人马斯洛也认为,“独处需要”是自我实现者的基本特征之一[5]。
然而,随着互联网的渗透,人们的社交行为越来越频繁,留给独处的时间却越来越少。车作为一个封闭的空间,能够给人来短暂的与世隔绝感,给车内的人提供独处的空间。在这样短暂的封闭里,人可以暂时不受制于社会及自我加诸的压力,从而创造一个利于关注自我的环境氛围。事实上,很多人也在这么做:知乎上一个关于“为什么一些人开车回家到楼下却要待很久才下车?”的问题的讨论,浏览量达到两百多万,人们纷纷表示自己也有同样的情况。
车是一个个人空间,连接了工作环境和家庭环境,那些我们身为职员、丈夫、妻子、父母、子女需要对别人负责的地方,而在车里我们只需要对自己负责。这或许就是很多人下班后到家却不愿下车的原因。汽车为我们创造了一个可以更加关照自我的环境氛围。
2)人的情感与情境息息相关。20世纪初Marry Richmond 和Jane Addams 在慈善组织会社和睦邻组织运动中都推行“人在情境中”的理论范式。20世纪50年代的心理社会学派的托尔正式提出了“人在情境中”的概念,并逐渐成为社会工作的主要实务原则。心理暨社会学派将“人在情境中”定义为个人受到其生存环境内的诸多因素的影响,并且人的内心事实及所处的社会环境经常处于交互作用状态[6]。
从生活中举例,同样的情况下,驾车行驶在宽阔的马路上让我们感到放松,而城市中拥挤甚至堵车的道路让我们感到烦躁,中国甚至因此创造了一个新的词语用来指代因为在不好的驾车情况下易怒的人们:“路怒族”。或许自动驾驶可以通过大数据计算等方式解决堵车问题,但车内和车外的环境会影响人的情感仍然是不可改变的事实。这也是车内屏幕可以发挥巨大作用的地方:通过变换情景来改善人的感受,通过这种方式,自动驾驶汽车或许就可以实现除了物理时空移动外主观情感的移动。
2.2.2 自动驾驶车特征
1)主动带领的可能。电视是画面和声音的线性播放。在电视与人的关系中,人是被动的。电视更多的扮演带领者的角色,带领人们进行探索,这是区别于智能手机的最大特点。而在智能手机与人的关系中,人是主动的。这就使得电视更像是陪伴的朋友,而手机更像是工具。电视与人这一关系的特点和自动驾驶汽车与人的关系的特点类似。汽车行驶的不同的路径像是不同的频道,而最后希望达到的都是良好的情绪体验。
自动驾驶改变了车与人的关系。在传统汽车驾驶中,人是驱动者,决定目的地,决定行驶路径,决定什么时候刹车,什么时候加速,什么时候转弯。而在自动驾驶中,人只需考虑目的地,其他的都可以有车自主完成。甚至目的地的选择,汽车也可以根据对车主情感的分析提供目的地建议。这就带来了一种可能:汽车主动带领人而非人支配汽车。
2)与变化中环境互动。出行是基于时间与空间两个变量的线性移动。车最大的功能就是它以一定的速度移动,运载用户到达各个地方。因此,车内电视屏幕与家里摆放电视屏幕的不同:对于家庭摆放的电视来讲,四周的环境是不变的,而对于车内电视屏幕来讲,观众观看的环境处于变化之中。因此,车内屏幕还应考虑如何与外部环境的变动相结合。
3)透明是挡风玻璃作为屏幕的独特之处。在移动的过程中,车与外部环境相对运动,车内的空间,即车与人的关系是相对静止的,且人的活动空间较小。自动驾驶使得乘车者从专注驾驶、关注路况之中解放出来,因此,有更多的精力聚焦屏幕,但同时,我们也不希望车内屏幕成为一个巨大的智能手机,车窗外的变换的风景同样具有价值。我们希望车内屏幕一方面带给被固定在座位的乘客提供信息和娱乐,一方面能够帮助乘客更好地与经过的环境互动。
4)车内是一个相对封闭的空间。车内空间使得人与屏幕的距离、位置发生变化。除非打开车窗,在车内的人6个方位都被车所环绕,这意味着屏幕可以出现在任何的位置。另外,车的封闭性可以为音响的声音提供更好的混响效果,从而使情景被营造地更加逼真。因此车内电视可以打造一个立体沉浸式的空间。
5)汽车与环境是全方位的接触。汽车可以记录全方位的画面信息和声音信息,这远远强于现有的摄影摄像设备。
2.2.3 技术实现
1)大数据分析提供个性化服务。通过GPS记录,汽车驾驶会留下丰富的位置移动数据,这些数据可以透露出是驾车者的习惯、需求等个性化信息。另外,屏幕本身可通过摄像头获取车主的视线注意力的偏好信息。通过对这些数据进行分析,我们可以洞察驾车者的需要,以便为他提供更加个性化的服务。
2)物联网技术打通信息。将手机与自动驾驶汽车相连,整合手机的偏好信息与自动驾驶汽车的行车信息,能够更好地提供个性化的服务。如将手机中的日程安排信息发送到自动驾驶汽车,使得自动驾驶汽车可以提前规划好出行路线和行程。将智能家居(如智能冰箱)与自动驾驶汽车相连,使得自动驾驶汽车可以自动加入生活必需品采购的行程。自动驾驶汽车与自动驾驶汽车相连,可以构建全新的社交信息分享平台。
3)可以无处不在的显示屏。未来车内屏幕应该采用透明显示屏,这个在技术上其实已经离实现不远。同时,我们希望从车内看显示屏是透明的,从车外看不透明。这样,在保证隐私的同时,使车内屏幕不再是一个需要单独设置的存在,它可以出现在车内四壁的任何部位,与车融为一体,使得车的设计更加简洁化。通过透明的显示屏,乘客的视野可以被无限放宽,同时,可以通过与屏幕的交互对外部景色进行编辑、标记,一方面,保证了车内屏幕给乘客提供娱乐和信息,另一方面将车内屏幕与手机区别开,使得人与外部环境可以有所互动。
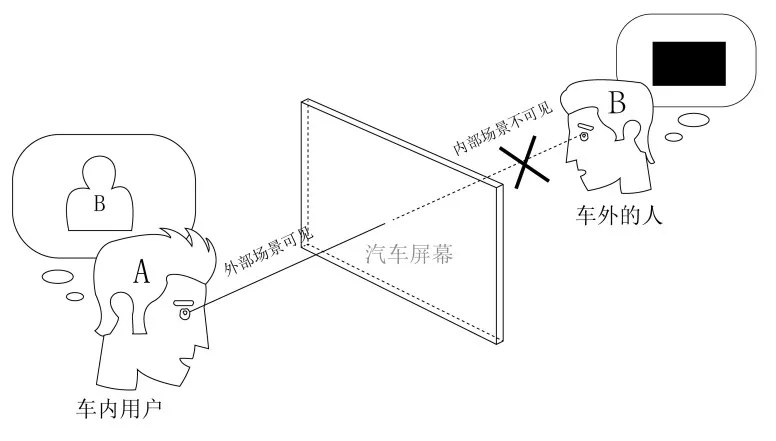
图3 车内的显示屏是一面单向透明的玻璃,车外的人不会看到车内的情况
4)眼动追踪。我们希望车内屏幕在车外配有镜头,在车内配有感知仪器。通过感知仪器进行眼动追踪,测量眼睛的注视点的位置或者眼球相对头部的运动来收集详细的技术信息,记录用户观看(和没有观看)的位置,以及观看的时间。通过眼动追踪,我们可以更好地分析乘客的行为,了解他们对什么样的风景更感兴趣。
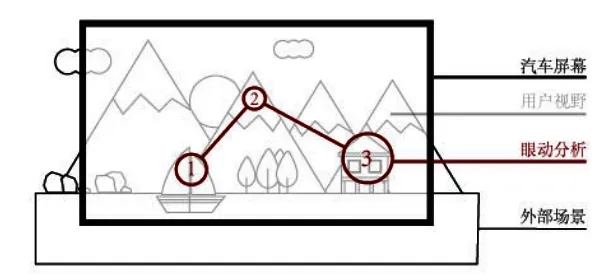
图4 眼动追踪技术可以识别记录视线移动的轨迹和停留时间
5)智能体感。因为乘客很大程度上被固定在车内,移动空间较小,一定要触摸屏幕才能实现交互的方式给他们带来不便利,同时限制了显示屏的大小和存在的位置。通过智能体感,乘客可以对屏幕进行隔空操作,扩展了车内屏幕的可能性。
6)CAVE沉浸式投影。CAVE系统基于多通道视景同步技术和立体显示技术的房间式投影可视协同环境,该系统可提供一个房间大小的六面立方体投影显示空间,参与者完全沉浸在一个被立体投影画面包围的高级虚拟仿真环境中,由于投影面几乎能够覆盖用户的所有视野,所以CAVE系统能提供给使用者一种前所未有的带有震撼性的身临其境的沉浸感受。汽车内部其实相当于一个封闭的空间,很适合沉浸式投影。
7)裸眼VR。车内屏幕可以模拟外部环境,给车内的人一种行驶在所模拟的环境中的感受。
8)摄像技术。结合汽车移动的特点,我们想象汽车可以成为一个移动的摄像机。在显示屏背面,也就是车外部的各个方位安装摄像头,可以实现全方位的立体摄像。同时,结合眼动追踪和智能体感,自动驾驶汽车可以分析乘客的视线,自动聚焦拍摄。另外,摄像留下的视频和图片可以通过沉浸式投影或者裸眼VR随时调用,帮助乘客实现情绪的移动。
2.3 设计模型
2.3.1 细节设计
结合设计元素中的技术元素,自动驾驶汽车将:
1)拥有个性化定制的数据分析基础。与手机同步连接,监测个人偏好和需求。与自动驾驶汽车连接,共享GPS信息和周边环境信息。
2)可以进行手柄操作,手势交互。尽量简化屏幕的操作区域和按钮。自动适配,手动调整,例如,屏幕亮度可在自动适配环境的基础上手动调整。这也使得窗外环境的信息足够清楚,以保障安全。
3)通过摄像头识别扫描使用者的样貌体态,合成一个动画形象。这个动画形象可以与摄像环境合影。

图5 虚拟的个人卡通形象可以与车外场景合影
2.3.2 场景设计
我们将从3个方面进行具体的举例阐述:
1)辅助时空移动。人们总是有探索未知的欲望、感受新鲜事物的愿望。有时候你并不知道自己想去哪儿,或是有大概的宽泛的目的地,基于大数据分析的自动驾驶汽车可以结合你的个人偏好和网络信息,向你推荐几个路线以及目的地供你选择,并为你规划行程,这些信息都会在车内屏幕上显示并与乘客有所交互。
在行程中,一方面,车内显示屏的摄影功能会带给乘客更好的体验。屏幕将通过摄像头和红外线感应技术,通过分析眼睛与显示屏的距离、显示屏曲面、瞳孔变化定位你感兴趣的画面范围,通过摄影按钮,会自动取景并对焦,通过手动调整记录画面。你不会再为了错过路途上转瞬而逝的风景而遗憾。同时你也可以通过这一功能,利用车内屏幕进行聚焦,清晰地看到你希望看到的但无法通过肉眼get到的远处的风景,麦克卢汉认为,媒介是人的延伸,通过这一方式,人的视觉被延伸了,从这个角度上看,这改变了人被固定在车内的情况。

图6 屏幕可以识别并聚焦放大你感兴趣的区域
另一方面,利用眼动追踪,车内屏幕可以更好地分析你所偏爱的风景,再通过大数据匹配你更喜欢的风景路线。除此之外,通过AR显示屏,你可以在实地标记你到过这里。你可以上传自己记录的画面和声音,同时获取周边的摄影摄像作品,并与作品的记录者互动。
2)改变原有移动情景。在原始的驾驶中,我们难以改变外部的风景。对于很多生活在城市中于公司和家两地奔波的人来讲,外部的环境早已看惯了,失去了新鲜感。如果用户数据分析的结论是“车主希望去夏威夷”,我们的概念可以让他在任意行驶环境中,也仿佛在驾车在夏威夷的海边。通过平面VR自定义窗外景色,或通过沉浸式投影和立体音频在车内创造一个全新的环境,使得乘客拥有情感的移动。也就是说,乘客不需要在空间上到达夏威夷,就可通过沉浸式投影,在情感体验上到达那里。
这样的情景还可以运用在其他方面。例如在乏味的长途行驶中、孤独的单人旅途。当然,这也使得足不出户游遍世界真正成为可能。
3)调回历史的时空移动情景。由于具有沉浸式投影,通过摄像功能记录下的影像,可以随时通过车内屏幕回放,让你再次回到曾经的情境,随时温习美好的回忆。
影像的创作使得摄影有了全新的模式,同时也让用户内容生产成为了可能。用户可以将自己拍摄的影像上传,与其他用户分享。这些上传的影像资料,也有可能成为城市研究等研究项目的宝贵资料库。也可能会为破案提供线索。
3 自动驾驶汽车新媒介对信息传播提出新改变
3.1 全新的信息呈现方式
作为媒介,报纸的信息传递依赖于文字和纸张,广播的信息传递依赖于声音,电视的信息传递依赖于声音图像,而自动驾驶汽车的信息传递是全方位立体环绕的文字、图像、声音。与电脑和手机那样任何信息都来自于一块方形的屏幕的传递不同,自动驾驶汽车的屏幕可以出现在任意位置,甚至与车窗相结合。信息的呈现不再是方形的排版,而更因考虑坐在车内的人们的体验。另外,由于车内环境的特殊性,自动驾驶汽车作为媒介可能代表大屏显示的回归,特别是前车窗,打破了从电视到电脑到手机屏幕越变越小的趋势。
3.2 场景化的信息交互
场景最早由罗伯特斯考伯和谢尔伊斯雷尔在其著作《即将到来的场景时代》中提出,它是描述移动时空的新维度,是基于特定的时间、空间、行为以及心理的环境氛围的总称。场景化,就是一定时空中,由于移动互联网与社交传播而被凸显与强化的人性需求及其被满足的过程。场景化传播的价值就是在此过程中产生的各种“赋能”。
场景化传播是一个基于个人的实时状态而进行的特定的信息或服务匹配,在算法的个性化精准推送和LBS等技术的结合下,通过社会化媒体实现信息传输。和场景相关的五个概念:大数据、移动设备、社交媒体、传感器和定位系统,他们又被称为场景五力,搭建了移动互联时代场景的概念,使“场景”得以完善和实现。
自动驾驶汽车在不断移动中变换着场景,因此,传播可以与场景进行紧密的结合。通过AR显示屏,使用者可以在实地标记你到过这里,并上传自己记录的画面和声音,同时获取周边的摄影摄像作品,并与作品的记录者互动。对于媒体来讲,更应该基于所在地点传递相关信息。例如,当使用者行驶在一条陌生的马路上时,向他推送附近的风土人情信息、相关新闻、天气状况,并按照他的需要推荐相关商铺和地点。
自动驾驶汽车能够充分利用屏幕与周边环境的交互,使我们更加关注周边环境、关注生活,这与智能手机有巨大的区别。
3.3 全新的信息生产手段
自动驾驶汽车不仅是一个全新的传播媒介,也可以成为信息生产手段。车外部的各个方位安装摄像头,便可以实现全方位的立体摄像。同时,结合眼动追踪和智能体感,自动驾驶汽车可以分析乘客的视线,自动聚焦拍摄。另外,摄像留下的视频和图片可以通过沉浸式投影或者裸眼VR随时调用。除此之外,基于物联网的自动驾驶汽车也成为了很好的UGC平台,用户可以根据场景上传信息,这些信息成为很好的素材,媒体应利用这些素材生产优质的产品。
4 结论
技术的一次次进步,在客观上推动着传媒业的发展,但同时,也在主观上一次次对传统媒体及其从业者发起挑战。随着技术的迭代,“新媒体”不断产生又不断被更新的媒体所冲击。媒介的更迭对媒体以及媒体从业者都提出了巨大的挑战,需要随着技术观念的更新来不断调整传播模式。
未来自动驾驶汽车的普及和发展,也必定会使得媒体发生新的变革,而人的体验将成为考量汽车的关键性因素。应对不断变化着的媒介,除了不断地追赶变化以外,我们更应该具有敏感性和前瞻性,从被动的追赶转为主动的探索,才能在技术迭代速度不断加快的今天,沉着应对、不被时代抛弃。
5 致谢
感谢中国传媒大学教授刘萍老师提供的建议和帮助。
