某舰载伺服转台动力学仿真分析
2019-01-19闫秀峰
黄 兴,蔡 潇,闫秀峰
(1.海军驻上海地区电子设备代表室,上海 201800;2.中国电子科技集团公司第五十一研究所,上海 201802)
0 引 言
伺服转台是雷达系统中极其重要的组成部分,它是支撑天馈系统、伺服驱动装置、机电参数转换单元的主体基座,是承受静载、动载(振动、冲击等)的关键基础构件。转台的设计和制造对雷达系统的精度、可靠性、加工周期和成本影响都很大。未来随着通信技术和雷达性能的不断发展,小型化、响应快、精度高、环境适应性强将是今后转台的主要发展趋势。本文所述转台为某舰载设备。其工作环境恶劣,机械性能以及密封性要求都较高。设计时主要从整体结构布局、关键结构件材料、工艺处理、装配等方面入手,同时采用有限元分析方法,对转台的刚度、强度进行有限元仿真分析,这样既缩短了转台设计周期,也大大提高了转台的经济性。
1 结构设计
1.1 转台使用要求
该伺服转台首先要实现方位和俯仰二维的指向、扫描功能,同时需满足舰载环境条件。 在工作状态,转台方位可实现360°连续扫描,俯仰在-20°~+15°范围内连续扇扫。其中方位转动最大角速度为90°/s,俯仰转动最大角速度为20°/s,方位、俯仰转动角加速度均为70°/s2。抗风能力:≤35 m/s,正常工作;≤45 m/s,不损坏。
1.2 转台结构形式
根据该转台的安装空间采用了立轴式结构。该种型式可充分利用轴向尺寸以弥补径向尺寸的不足,且结构紧凑,维修方便。
转台分为方位、俯仰两部分。方位的传动形式为标准直齿轮二级传动。方位传动立轴通过一对圆柱滚子轴承分别与底座和上盖连接,传动轴靠近底座一端安装有方位测角装置和汇流环,另一端与俯仰支架相连。
由于俯仰转速较低,且传动精度要求不高,因此俯仰的传动形式采用平面连杆机构,该机构形状简单,加工方便,同时能承受较大的冲击力[1],主要由底板、俯仰支架、俯仰平板、横轴等组成,通过俯仰驱动系统实现运动。转台的结构示意如图1所示。

图1 转台结构示意图
1.3 转台结构特性
针对转台的指标要求及使用条件,在结构设计和工艺方法选择上,侧重保证转台以下结构特性,并针对此类特性,采取相应措施。转台的结构特性如下:
(1) 转台整体机械性能好
在设计时,根据指标要求,针对转台中的重要结构件,如方位底座、俯仰支架、底板等均采取整体融模铸造的工艺模式。相比拼焊的结构方式,该种工艺技术刚度更好,变形小。方位传动齿轮副的齿面均进行高频淬火处理,硬度为HRC47~52。同时齿边研磨,降低传动时的振动和噪声。俯仰部分结构设计成封闭框架型式,以便提高系统整体刚度。
(2) 方位、俯仰传动链路误差小
从设计、加工和装配3个环节进行误差控制。
在设计过程,对转台上重要零部件的配合尺寸、形位公差、表面粗糙度都做了详细要求:如齿轮孔的直径、键槽的宽度等公差需控制在0.003 mm之内;齿轮、齿坯两端面平行度需控制在0.01 mm;在加工过程,对有关联尺寸的零部件均需设定同一加工基准;在装配过程,统一安装基准。
(3) 防腐蚀能力强
由于转台在海上工作时要受到盐雾、霉菌、海浪的影响,因此其防水、防潮、防腐的能力要高。在设计时,所有旋转轴输出端均采用旋转轴封与端面密封相结合的密封方式;对于受海浪冲击部位,采用迷宫或者二重、三重防护的措施;对于容易积水的密闭空间,增开落水孔和导流槽;防护盖板边缘处均设置包围台阶,设置迷宫防护; 同时,暴露在外的元器件均选用IP65以上的防水等级。
2 仿真分析
对转台的仿真分析主要从2个维度展开:刚度和强度。
针对转台刚度,主要采用模态仿真分析法,找出系统的最低固有频率和相应振型。通过分析频率数值和振型模式,找出影响转台刚度的薄弱环节。针对转台强度,主要选取舰载时最大冲击加速度进行加载分析,求出最大应力点。
在将转台的物理模型转化为有限元模型时,要对转台中的特殊构件做相应的等效处理。方位、俯仰驱动系统的等效主要依据转动惯量动能等效和刚度势能等效的原则[2],对于电机中的定子和转子、轴承的内圈和外圈,均可依此原则进行等效。通过上述等效处理,可对转台装配体进行建模、网格划分等操作[3]。该有限元模型共含有节点21 000个,实体单元8 500个,壳单元1 300个,杆单元120个,连接单元1 175个。模型如图2所示。

图2 转台有限元模型
2.1 模态及振型分析仿真
由于转台为立轴式,且重心位置位于安装面的上部,因此,保证转台俯仰的刚度尤为重要,模态分析的对象为俯仰的结构形式。为便于找出刚度中的薄弱环节,采取逐级模态分析法,先分析俯仰底板,再分析俯仰整体平面机构。
由于是舰载设备,且该转台安装于低频区,因此模态分析只考察前4阶频率。
2.1.1 底板模态及振型
一阶模态频率点114 Hz,振型为底板上下摆动;二阶模态频率点259 Hz,振型为底板左右摆动。其振型示意如图3所示。
三阶模态频率点306 Hz,底板前后扭摆;四阶模态频率点409 Hz,底板整体上下摆动。其振型如图4所示。
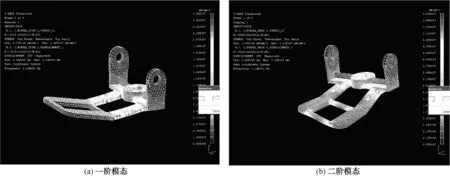
图3 一阶、二阶模态振型示意图

图4 三阶、四阶模态振型示意图
2.1.2 平面连杆机构模态及振型
平面连杆机构模态振型示意图如图5和图6所示。一阶模态频率点114 Hz,振型为底板上下摆动;二阶模态频率点257 Hz,振型为底板左右摆动;三阶模态频率点296 Hz,振型为平面连杆机构前后扭摆;四阶模态频率点406 Hz,振型为横轴扭摆。
仿真分析结论:不管是对单个零件还是结构整体进行分析,前几阶频率激起部位均为俯仰支架的底板,说明底板刚度较差,在系统整体可能引起结构局部谐振; 系统整体低阶频率较高,这是由于该天线座尺寸较小,结构紧凑,对低阶频率不敏感,因此作为舰载设备,由于其固有频率与激励频率是几倍频的关系,因此系统刚度能满足要求。
3 冲击仿真
根据舰载冲击条件,结合转台安装部位,对转台进行30g的冲击加载,加载后应力云图如图7所示。
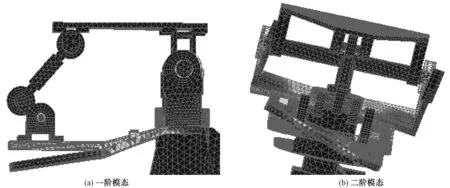
图5 连杆机构一阶、二阶模态振型示意图

图6 连杆机构三阶、四阶模态振型示意图
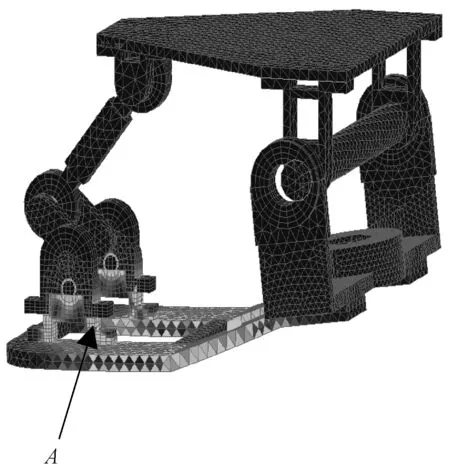
图7 冲击应力云图
由仿真分析结果可知:最大应力位于图中A处,即为底板与小支架的连接处,大小为70.7 MPa≤铸铝的屈服应力(150 Mpa),在冲击作用下,俯仰支架底板开孔两侧有相对摆动的趋势,且布置驱动系统一侧其摆动幅度较大;小支架与底板连接处刚度、强度均单薄,且连接面较小再加之底板的片状结构使得整体框架刚度和稳定性较差。为此,做如下改进措施:
(1) 底板变为框架结构,在侧面设计加强筋;
(2) 小支架底座加大,增加固定孔。
4 结束语
用有限元的方法对系统进行动、静力学分析是目前求解力学问题的主要方法,本文结合实际工作,对某舰载伺服转台进行了结构动力学分析,求解了其模态和振型,并模拟了在30g的冲击加速度作用下俯仰部分的受力情况,并针对仿真结果,对结构形式进行了优化改进。目前,该转台已随项目进行了较长时间的海上试验,运行状况良好。
