多功能射频模拟器中航迹模拟的研究与实现
2019-01-19邹慧
邹 慧
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
目前在雷达信号模拟中,航迹的模拟显得至关重要,它可以直观明了地展示出目标的运动轨迹、运动速度等各种信息,无论在雷达训练还是在雷达信号模拟器中,都需要对目标回波信号进行建航及航迹显示,同时还可以对相关参数进行动态显示,实现雷达航迹的图形化显示和航迹的实时动态模拟,便捷地实现人机之间的交互[1-3]。
1 航迹模拟的设计分析
在多功能射频模拟器中,对于航迹模拟的实现主要有2种方式:点迹处理方式以及航迹处理方式。点迹处理分为数据收发接口、点迹凝聚及提取两部分。航迹处理分为数据收发接口、航迹相关、航迹起始、航迹滤波外推以及航迹质量管理5个部分[4-6]。在多功能射频模拟器中,航迹模拟的主要功能是对飞机目标、导弹目标进行搜素、跟踪,完成全空域范围内300批目标的建航。具体框图如图1所示。
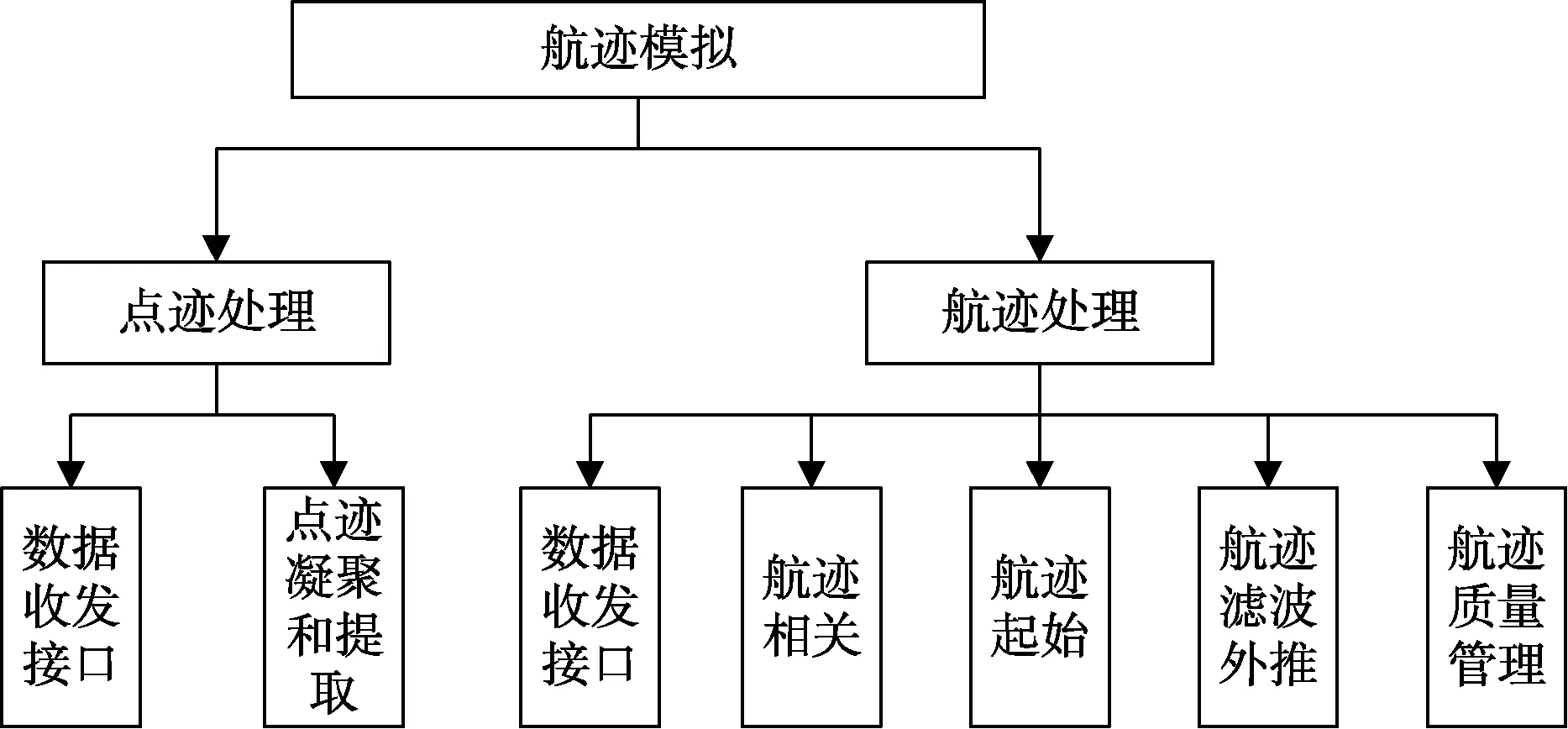
图1 航迹模拟组成框图
该硬件平台采用MPC8640D通用信号处理板,每块板子上各4个CPU,CPU与CPU之间可以通过备板以以太网或rapidIO模式进行互相通信。无论是点迹处理的收发接口还是航迹处理的收发接口都可以采用以上2种方式进行数据、控制命令和状态参数的传输。
根据不同的模式对不同距离单元、不同方位和不同仰角的视频数据,对于信号处理模块送过来的视频数据可以进行三维缓存,然后根据参数分辨率指标对不同空间位置信息的视频数据进行归拢和凝聚,从而实现对同一目标按质量中心准则进行点迹参数的提取。
航迹一般分为2种情况,分别为确认航迹和非确认航迹。为了达到抑制虚警的目的,在进行航迹相关时,先对确认航迹进行相关,然后再对非确认的航迹进行相关。相关主要分为粗相关和精相关2种模式。粗相关是指根据每条航迹的大、中、小波门进行航迹和点迹的粗相关。粗相关完成后,还需要进一步进行精相关,以完成航迹与点迹的一一对应关系。最终是为了实现航迹的延续和更新,在这个处理的过程中,对需要建立分支航迹的,可以根据实际情况进一步完成分支航迹的建航。
航迹的起始需要根据航迹起始的要求来完成。航迹起始一般包括自动起始和人工干预起始。自动起始时,当某个区域的点迹前后几个周期的位置信息和参数满足航迹起始的准则时,就建立新航迹并添加到航迹链表。人工干预起始时是将人工选定的点迹位置信息作为航迹起始的首点,根据后续点迹的情况进行快速起始。
航迹滤波外推是对一一对应的航迹和点迹进行航迹的误差修正,实现航迹的平滑滤波,提高航迹精度,同时进行航迹的一步预测,并根据预测位置设置航迹的相关波门,进行航迹下个周期的相关,根据航迹的平滑参数求出航路信息。
航迹质量管理即对航迹进行管理和调度。主要有:根据航迹与点迹相关的波门类型,对航迹进行量化打分,给出航迹的质量;对航迹质量达到一定要求的非确认航迹转为确认航迹;对出现分裂的航迹进行航迹合并;对不满足要求的航迹进行航迹撤销。
2 航迹模拟的算法实现
本文准备采用一种新型的自适应α-β-γ滤波算法来实现多功能射频模拟器中的航迹处理,具体的算法如下:一般情况下,该滤波算法是在直角坐标系下分别对x,y,z进行滤波,若采用极坐标系,则是对r,θ,ψ分别进行滤波。若对某一坐标测量值采用α-β-γ滤波算法,具体公式如下:
(1)
(2)
(3)
(4)
(5)
(6)

α-β-γ滤波算法是通过一般目标的运动规律和对目标位置的测量值来获得目标位置、速度和加速度的平滑值和预测值的一种算法。当目标位置的测量数据中存在随机误差时,该算法能够提高输出数据的精度,同时能输出运动速度和加速度的值。
该算法实现了机动目标和非机动目标的快速滤波处理,并把目标机动检测和自适应参数调整融合在了一起,跟踪精度较高。
在公式(1)~(6)中,假设前一时刻对当前时刻的加速度预测值等于前一时刻的平滑值。
α-β-γ分别表示测量数据的3个加权系数。理论分析结果应是随输入数据点数的变化而变化的3个系数,以便在最小二乘法估算值的基础上得到最佳的滤波效果:
(7)
(8)
(9)
由该系数可以看出,当n→∞时,α,β,γ均趋向于零,表示新的测量值不再起作用。恒定等速度和恒加速运动的物体从工程实现的角度来讲是不存在的,只能在一段时间内近似认为恒速度或恒加速。n的值越大,滤波效果就会越明显,故在变系数情况下,就需要合理选择n的值。但由于同时还存在对于机动目标的滤波迟后误差会变得更严重这样一个问题。如表1所示,列出了不同n值对应的α,β,γ系数和相对采样时间归一化的滤波器带宽(3 dB带宽)的具体值。我们可以根据数据采样时间和滤波器带宽来确定系统最大使用的n的值,以满足实际工程应用。
可以用以下方程来描述一个目标的运动轨迹:
(10)
α-β-γ滤波对该运动模型均是无偏估值。

表1 α-β-γ滤波系数表
3 软件实现流程
该系统的航迹处理软件流程具体如下:
(1) 网络接收数据,包括点迹数据以及来自整机的工作模式、区域划分等操控命令。
(2) 进行点迹存储。根据点迹的真实位置信息,存储点迹数据。根据点迹的来源不同,按照搜索波束、跟踪波束、确认波束进行对应的处理。
(3) 进行航迹起始和多目标数据互联,依据不同的工作模式和点迹来源,采取不同的处理流程。
(a) 对于来自搜索波束的点迹
先后与可靠航迹、暂时航迹进行点航相关,满足相关条件则用该点迹更新航迹信息,不满足则继续与自由点迹库中的点迹进行初始相关,满足相关条件进行航迹起始,形成暂时航迹,不满足则存入自由点迹库,等待下一周期的点迹进行相关处理。
(b) 对于来自跟踪波束的点迹
判别跟踪点迹是否有效,若无效则认为当前跟踪航迹未录取到点迹,若有效则进行点航相关,若未关上,认为航迹未录取到点迹,根据录取情况进行跟踪航迹管理。
(4) 航迹滤波预测,采用自适应α-β-γ滤波算法进行滤波。
(5) 航迹管理,根据点航互联情况,对航路链表进行管理,更新目标航路中的波门设置、滤波系数调整等,删除多个周期未录取点迹的航迹。
(6) 航迹输出,对已完成互联、滤波、预测及管理的航迹进行实时的输出。
综上所述,航迹处理流程图如图2所示。

图2 航迹处理软件流程
在点迹处理中的相关区域划分:根据相邻距离单元、相近方位和相近仰角的准则进行相关区域的设定,具体根据整机的实际情况来定。
凝聚处理:对符合相关准则(在一定方位、距离、仰角误差范围)内的目标,认为是同一个目标的分散点,根据质量中心法求出目标真正的方位、距离、仰角值的估计值,通过凝聚处理后把本属同一目标但分散到相邻距离单元、相邻仰角和相邻方位的符合相关条件的分散目标根据质量中心法找出目标真正的中心,然后把该中心对应的相关参数(如方位、距离、仰角等信息)求出送给后面点迹预处理进行下一步处理,具体采用质量中心法进行点迹的凝聚处理,如下列公式所示:
(11)
(12)
(13)
式中:E为方位中心估计值;A为仰角中心估计值;R为距离估计值;Ni为符合相关条件第i个目标的幅度值。
本设计中相控阵雷达的航迹处理方法如下:
(1) 空域划分交叠区域内的航迹处理
在搜索状态下,空域的划分会产生一定大小的交叠区域,该区域的目标在2个区域搜索的过程中会分别产生点迹,由于不同区域的扫描时机和数据率不相同,1批目标产生的2个点迹无法在点迹处理中合并,只能在航迹处理中进行。其主要按以下2个步骤进行:
(a) 不同区域点迹之间的相关
每个区域接收点迹时,判断该点迹是否处于交叠区,做好相应标记,并同时记录与之相邻的区域编号。当前区域接收到的点迹,先进行航迹相关处理,然后与当前区域上一周期的剩余点迹进行相关,没有关上的点迹判断其是否位于交叠区,将位于交叠区的点迹再和与之相邻区域上一周期的剩余点迹进行相关。不同区域点迹之间的相关主要是用来避免目标位于交叠区航迹无法起始的现象。
(b) 不同区域航迹与点迹之间的相关
根据当前的空域划分,可以判断航迹是否存在跨区域的可能,对于有可能跨区域的航迹不仅要和本区域的点迹进行相关,还要和相邻区域的点迹进行相关处理。在和本区域的点迹进行相关时,如果扫描周期变化范围比较小,可以直接采用当前扫描周期进行航迹的相关和预测;在和相邻区域的点迹进行相关时,考虑到2个区域的扫描周期不一致,采样间隔为航迹和点迹时戳之间的差值,此时的相关也不能用当前航迹的预测值,而是要按照采样间隔实时计算预测值,然后再进行航迹的相关和预测。不同区域航迹和点迹之间的相关主要是用来避免航迹跨区域断航的现象。
(2) 变采样间隔的目标跟踪
在相控阵雷达跟踪中,可以根据某种最优准则对目标航迹进行采样。一般来讲,对机动目标的采样率要高于对直线飞行目标的采样率,以此来降低平滑和预测的跟踪滤波器误差,不需要明显增大相关窗口的尺寸,从而限制了虚假点迹的数目,有效提高跟踪的性能。
在目标跟踪时采用自适应的α-β滤波算法,该算法在相控阵雷达跟踪目标航迹处理中是具有典型性的。算法公式如下:
Xp(n)=Xs(n-1) +Vs(n-1)T(n-1)
(14)
Xs(n)=Xp(n) +α[Xm(n)-Xp(n)]
(15)
Vs(n)=Vs(n-1)+
β[Xm(n)-Xp(n)]/T(n-1)
(16)
式中:Xm(n)为采样时刻T(n)的位置量测;Xp(n)为采样时刻T(n)的预测位置;Xs(n)为采样时刻T(n)的平滑位置;Vs(n)为采样时刻T(n)的平滑速度。
接下来求取预测值与量测值之间的差值,即目标位置的残差:
E(n)=Xm(n)-Xp(n)
(17)
为了有效地减少噪声效应,可对E(n)进行一个α滤波算法的处理,即:
Es(n)=Es(n-1) +α[E(n)-Es(n-1)]
(18)
在目标跟踪中,目标位置的残差可以很好地反映系统跟踪的质量。当跟踪精度下降时,滤波器输出的残差将增大。航迹处理将此残差值送至系统调度,由它决策该目标跟踪的数据率及相关的参数。
4 结束语
本文通过对多功能射频模拟器中航迹模拟的功能分析,提出了具体的点迹和航迹的处理方法,在实际的建航和航迹模拟及航迹显示中得到预期的仿真效果。
