基于计算流体动力学的串列翼水陆两栖飞机静水面滑行过程
2019-01-18蔡宇峰王丽丽徐永泽
蔡宇峰, 王丽丽,2, 蒋 荣,2, 刘 涛,2, 徐永泽
(1.中国特种飞行器研究所,湖北 荆门 448035;2.高速水动力航空科学技术重点实验室,湖北 荆门 448035;3.西递安科软件技术(上海)有限公司,上海 200120)
近年来,由于计算机行业的飞速发展和算法的不断改进,原本用于航空航天领域的计算流体动力学(CFD)软件在船舶、化工等领域中有了飞速发展,尤其在船舶领域[1-4]。串列翼水陆两栖飞机(下文简称串列翼飞机)与船舶的水上性能研究,虽然有一定的相似性,但是也有很大的不同,主要体现在串列翼飞机的航速较高,产生了姿态角变化的大尺度运动。文献[5-8]中采用数值计算方法对串列翼飞机的气动性能进行研究,得到了串列翼与气动阻力之间的关系。
与传统的CFD软件不同,STAR-CCM+软件采用了最新的CFD技术,不同的功能模块各自独立创建,模块间不必要的关联降为最低,从而最大程度地避免了预料之外的计算结果。STAR-CCM+软件致力于以下3个关键因素的研究[9-12]:①稳健并准确的数值算法;②覆盖面宽广的物理模型;③易于处理的网格体系。
利用STAR-CCM+软件进行CFD计算的基本步骤如下所示:①建立计算模型及虚拟水池;②选择物理模型;③创建监测变量以及可视化场景。本文基于以上步骤,对串列翼飞机静水面滑行的CFD参数设置进行研究。
1 网格生成
本文基于串列翼飞机静水面起飞前的滑水过程来说明STAR-CCM+软件的完整应用过程,该过程构建了气动卸载的单机身模型并模拟了水气交混两相流。
1.1 几何外形构建
本文使用CATIA软件构建串列翼飞机几何外形。CATIA软件与STAR-CCM+软件的模型接口文件有3种类型,分别为stl、igs、 CATPart.将CATIA软件建好的几何模型导入STAR-CCM+软件中。
串列翼飞机单机身试验时,考虑到机翼升力的影响,通常采取在重心处添加卸载的方法,即根据试验速度的不同,在机身重心处加上一定的卸载载荷。该载荷的计算表达式为
(1)
式中:m为串列翼飞机初始质量;v0为起飞速度,v0=15.7 m·s-1;vx为试验滑行速度。
在数值计算过程中,为了与试验保持一致,也在重心处添加一个卸载载荷,具体如图1所示。图1中,F为卸载力,其大小由式(1)确定。本文在数值计算时采用单机身模型。

图1 卸载力示意图(vx=2.93 m·s-1) Fig.1 Sketch map of unload force(vx=2.93 m·s-1)
1.2 虚拟水池创建
导入的几何外形仅包含串列翼飞机的几何外形,要进行水动力性能的预测分析,需要围绕串列翼飞机来创建虚拟拖曳试验池。由于飞机左右对称,为减少计算量,因此采用飞机的一侧进行计算。
在Geometry->Part中建立总长7.0L(L为机身长度)、宽2.5L、高4.0L的长方体,入口距离机身首部2L,出口距离机身尾部4L,上边界、下边界距离机身均为2L。
1.3 网格划分
网格划分有整体运动网格方案和重叠网格方案。
(1)整体运动网格方案
在初始姿态下,如自由液面位于网格加密区,就可取得良好的自由液面捕捉效果。串列翼飞机起飞过程中,姿态变化显著。计算区域随着串列翼飞机发生大幅度的纵倾与升沉变化,使得捕捉自由液面的网格与自由液面不能实现良好的位置匹配(见图2),导致计算精度大幅降低。
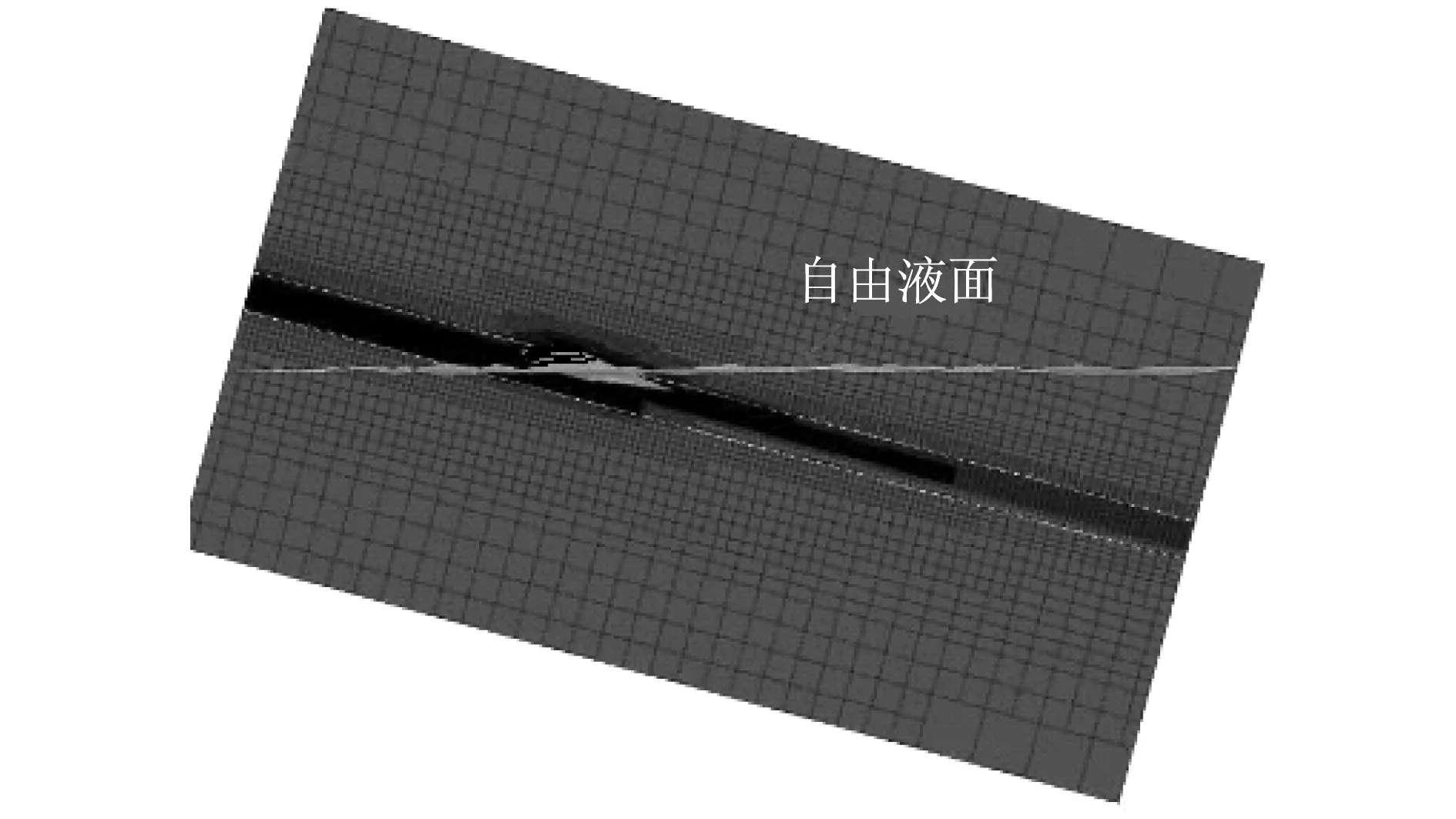
图2 自由液面网格(整体运动网格)Fig.2 Mesh of water surface(global mesh)
(2)重叠网格方案
将流场离散成随串列翼飞机一起运动的运动区域以及模拟水池的固定不动的背景区域,2个区域之间的数据传递采用线性插值,从而保证了串列翼飞机发生大幅运动时捕捉自由液面的网格不发生移动,进而提高计算精度,如图3、4所示。

图3 自由液面网格(重叠网格)Fig.3 Mesh of water surface(overset mesh)
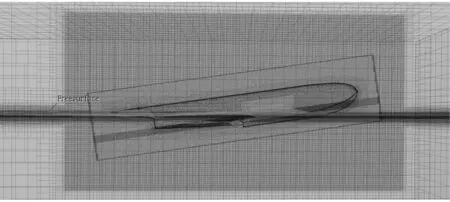
图4 自由液面网格放大图(重叠网格)Fig.4 Detailed water surface mesh(overset mesh)
鉴于起飞过程中串列翼飞机姿态角偏大的现象,采用重叠网格方案。
在串列翼飞机周围建立一个小的Block,用布尔减运算在小的Block里面减去飞机,得到Overset,即重叠区域。
在STAR-CCM+的几何模型中,大的Block代表虚拟水池Virtual Tank,Overset代表随机身一起运动的重叠区域。
1.4 网格生成
在Geometry->Operations->Automated Mesh->Meshers中选择Surface Remesher与Trimmed Cell Mesher 2种类型。在Default Controls与Custom Controls中设置参数,如表1、2所示。表2中,X向是指沿坐标系X轴的方向,Y向是指沿坐标系Y轴的方向,Overlap是指机身加密区,Kelvin是指机身产生兴波的区域 。

表1 Default Controls的参数设置Tab.1 Parameter setting of Default Controls

表2 Custom Controls的参数设置Tab.2 Parameter setting of Custom Controls
1.5 网格质量检查
在Mesh->Diagnostics中检查网格质量,在Output窗口中检查输出的网格质量。当Volume Change在0~1.0×10-3范围内变化时最好没有网格,本文中这个范围内变化的网格数目为零。
2 模型设置
2.1 物理模型
采用流体体积(VOF)方法对同一连续体内的2种流体(空气和水)进行模拟。在Physics->Models里选择如下模型:
(1)Eulerian Multiphase。串列翼飞机静水面滑行状态存在于不同相的2种流体中,故要激活欧拉多相流。
(2)Implicit Unsteady。针对具有水气两相流的计算,需要选择非定常,本文不能选择Steady。
(3)Gravity。考虑2种流体受到的重力作用,故要选择重力模型。
(4)Turbulent。模拟串列翼飞机长距离的静水面滑行运动,故采用湍流模型。
(5)VOF波。针对串列翼飞机静水面滑行,设置一阶平波,即无波浪面的静水环境。在Vof Waves->Waves下创建FlatVofWave 1,在Properties中将Point On Water Level设置为(0,0,0),Current及Wind的参数设置为一致,如(14,0,0) m·s-1。
2.2 初始条件
在初始条件Initial Conditions中主要对Pressure、Velocity以及Volume Fraction进行设置。设置参数为:①Pressure->Hydrostatic Pressure of FlatVofWave 1;②Velocity->Velocity of FlatVofWave 1;③VolumeFraction->Composite->Water->Volume Fraction of Heavy Fluid of FlatVofWave 1;④VolumeFraction->Composite->Air->Volume Fraction of Light Fluid of FlatVofWave 1。
2.3 边界条件
虚拟水池Virtual Tank有以下3种边界类型:①将Y=0平面上边界设为对称边界Symmetry Plane;②出口out为压力出口,设为Pressure Outlet;③计算域其余4个面为速度入口,设为Velocity Inlet。
随机身一起旋转的小区域Overset有以下3种边界类型:①机身表面是非滑移壁面,设为Wall;②与Virtual Tank重叠的边界面为对称边界,设为Symmetry Plane;③Overset的其余5个边界为重叠网格类型,设为Overset Mesh。
Virtual Tank与Overset之间采用线性交换的方式进行数据交换,即Interfaces->Overset Mesh 1->Physics Conditions->Interpolation Option选择Linear。
3 可视化和数据分析
3.1 可视化流场
为随时看到模型的运动状态,创建了可视化场景,本文中用来监测自由液面和对称面。
3.1.1VOF的可视化场景创建
(1)自由液面的等值面Isosurface创建。 右击Derived Parts,选择New Part->Isosurface;在弹出的Create Isosurface对话框中,Input Parts选择Background、Overset,Scalar 选择Volume Fraction of Water,Isovalue为0.5,在Display中选择No Displayer。
(2)创建场景,显示自由液面。右击Scene,选择New Scene->Scalar;将新创建的Scalar Scene1重命名为VOF;在VOF->Displayers->Scalar 1->Parts中选择创建的Isosurface,在Scalar Field下面选择Position[z];在VOF->Displayers下面新创建Scalar 2,在Scalar 2->Parts中选择机身模型;选择Scalar 1与Scalar 2的Transform,把其Property改为SYM,这样就可以显示整个机身以及自由液面。初始时刻流场如图5所示。

图5 初始时刻流场(vx=2.93 m·s-1)Fig.5 Flow field at initial time(vx=2.93 m·s-1)
3.1.2对称面SYM的可视化场景创建
右击Scene,选择New Scene->Scalar;将新创建的Scalar Scene1重命名为SYM;在SYM->Displayers->Scalar 1->Parts中选择2个对称面,在Scalar Field下选择Volume Fraction of Water;在SYM->Displayers下新创建Scalar 2,在Scalar 2->Parts中选择机身模型;选择Scalar 2的Transform,把其Property改为SYM,这样就可以显示整个机身。初始时刻对称面如图6所示。

图6 初始时刻对称面(vx=2.93 m·s-1)Fig.6 Symmetry plane at initial time(vx=2.93 m·s-1)
3.2 水动力性能监测曲线
串列翼飞机的阻力定义为在静水中以恒定速度拖曳飞机所需的力。通常,设计串列翼飞机时应让它以尽可能小的阻力在水中移动。现创建随时间变化的阻力图、纵倾图以及升沉图,以便从模拟中提取飞机的水动力性能。阻力可分为以下2个分量:压差阻力和剪切阻力。
(1)创建阻力监测曲线
右击Report->New Report->6-DOF Body Acceleration Surface Average,选择Force;将新创建的Force1重命名为Total Drag;将Properties中的Direction设为(1,0,0),Force Option选择Pressure+Shear,Parts选择飞机模型。右击Total Drag,选择Create Monitor And Plot From Report,为阻力创建监测窗口。
(2)创建纵倾监测曲线
右击Report->New Report->6-DOF Body Acceleration Surface Average,选择6-DOF Body Orientation,将6-DOF Body Orientation 1改为Trim;将Properties中的Angle Report Option选择为Rotation Y Axis;右击Trim,选择Create Monitor and Plot From Report,为纵倾创建监测窗口。
(3)创建升沉监测曲线
右击Report->New Report->6-DOF Body Acceleration Surface Average,选择6-DOF Body Translation,将6-DOF Body Translation 1改为Sinkage;将Properties中的Direction设为(0,0,1);右击Sinkage,选择Create Monitor And Plot From Report,为升沉创建监测窗口。
3.3 计算结果
图7显示了随时间变化的总阻力。在模拟开始时总阻力出现了强烈的振荡,随着模拟的进行振荡逐渐平稳,大约10 s后计算达到收敛状态。
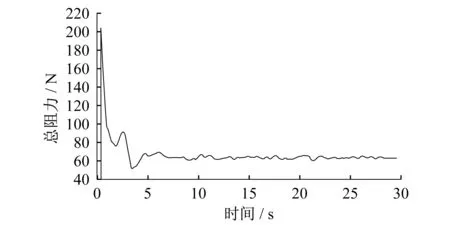
图7 总阻力监测曲线(vx=2.93 m·s-1)Fig.7 Monitoring plot of total drag(vx=2.93 m·s-1)
图8显示了模型航速稳定时围绕模型的波型。

图8 稳定状态流场(vx=2.93 m·s-1)Fig.8 Flow field at steady navigational speed(vx=2.93 m·s-1)
图9在对称平面上显示了模型航速稳定时围绕模型的自由液面细节。

图9 稳定状态对称面(vx=2.93 m·s-1)Fig.9 Symmetry plane at steady navigational speed(vx=2.93 m·s-1)
4 结论
本文基于STAR-CCM+软件对串列翼飞机的黏性流场进行了CFD参数设置研究,得到以下结论:
(1)基于STAR-CCM+软件模拟串列翼飞机静水面滑行状态时,计算模型可以采用气动卸载的方式来代替机翼的气动升力。
(2)基于STAR-CCM+软件的重叠网格方法可以有效地完成串列翼飞机静水面滑行的仿真工作,验证了重叠网格方法及VOF方法对求解三维流固耦合问题的有效性。
(3)STAR-CCM+软件能很好地模拟串列翼飞机静水面滑行的绕流流场,适用于固定拖曳,也适用于三自由度运动。
(4)本文方法可以用来预测串列翼飞机静水面滑行状态下的水动力性能,为串列翼飞机优化设计提供一定的技术支持。
