浅析幅相误差对某机载雷达性能的影响
2019-01-18李文君冯建锋张亚秒
李文君, 冯建锋, 张亚秒
(中国洛阳电子装备试验中心,河南 济源 459000)
某机载雷达具有空/空、空/地等多种工作模式,在靶场的前期试验训练任务中得到了广泛应用。机载雷达对低飞目标的可视距离比地基雷达要远得多,而且可以快速灵活地部署在所需要的地方。然而,机载雷达下视工作时会受到地杂波的影响,导致远距离目标或弱小目标淹没在剩余杂波中。空时自适应处理(STAP)技术可有效抑制地杂波影响,大大提高运动目标的探测能力。若要实现全空时域的最优STAP,则需要巨大的设备和运算量,在工程上实现十分困难。某机载雷达采用基于和差通道的空时自适应处理(ΣΔ-STAP)技术,该技术是一种特殊的固定降维方法,利用一般雷达都具有的和(Σ)波束支路、差(Δ)波束支路作为空域通道,联合时域多普勒局域化进行自适应处理。
雷达天线采用阵列天线,每一个阵元发出的信号在空间合成,形成波束指向,而阵元信号不同程度地存在幅度和相位误差(下文简称幅相误差)。本文重点研究幅相误差对基于ΣΔ-STAP技术的机载雷达性能的影响,并结合雷达试验数据进行验证。
机载相控阵雷达一般采用平面相控阵天线,如图1所示。
图1中:V是载机平行于地面的速度,α是天线阵面与载机速度之间的夹角,θ和φ分别是杂波散射点相对于天线阵面的方位角和俯仰角,ψ是对应的空间锥角。
本文假设平面阵的列数N为40,行数M为30,这样总阵元数为N×M,达到103数量级。若在阵元级上直接做自适应处理,则空时二维处理时还要加上脉冲串。假设脉冲数K为34,那么M×N×K为几万,自适应处理的协方差矩阵高达几万阶,计算量庞大,设备复杂,在工程上无法实现。实际机载相控阵雷达通常将各个阵元通过微波网络先形成若干个子阵或波束再进行处理。
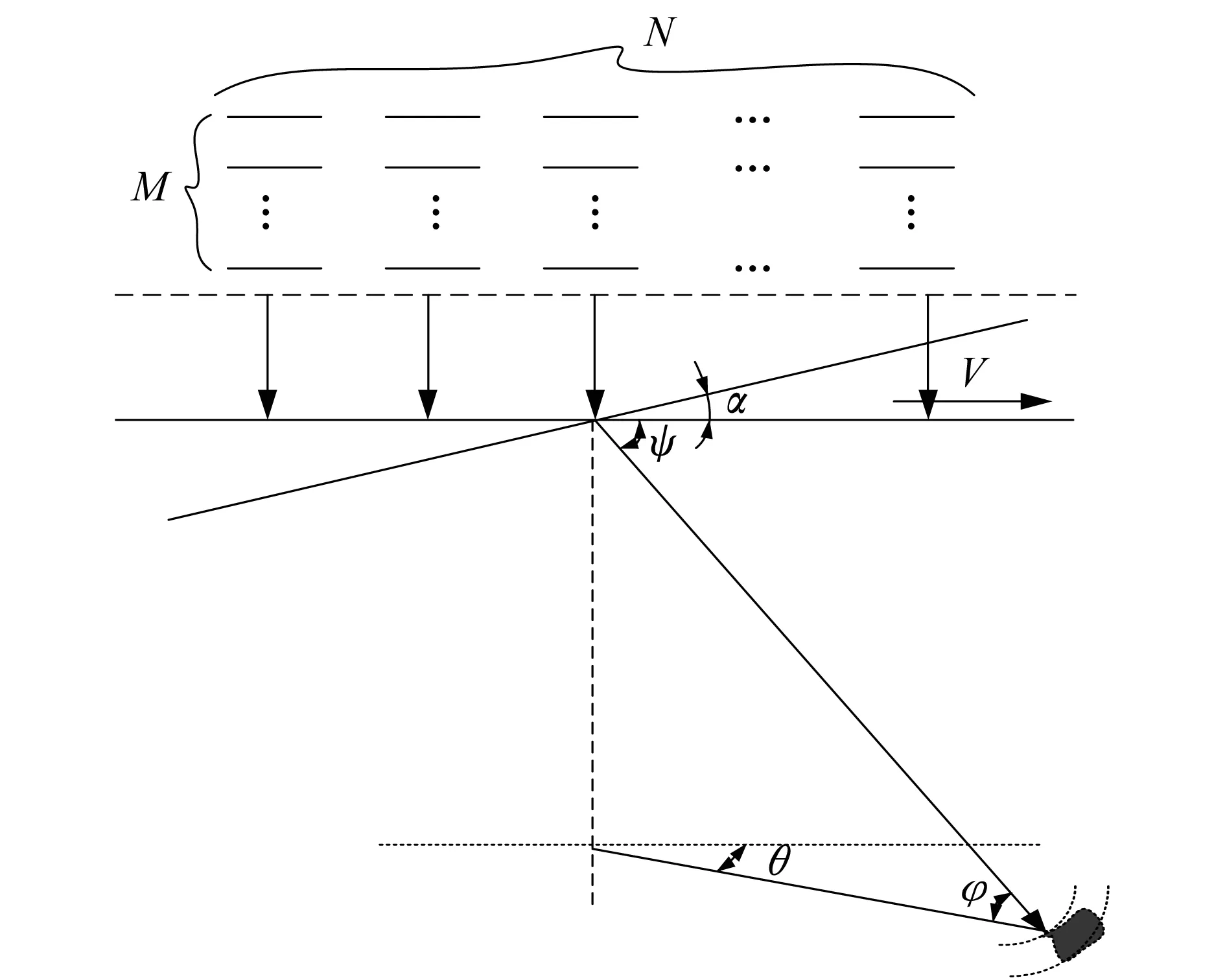
图1 平面阵及其坐标系Fig.1 Plane matrix and its coordinate system
1 ΣΔ-STAP原理
工程上通常有以下2种空域降维方法[1-2]:一是通过形成子阵进行降维,先采用列馈形成N个列子阵,然后进行自适应处理,如N仍然较大,则在N个列子阵的基础上进一步合成更大的子阵;二是在波束域进行降维,形成Σ波束、Δ波束,这是最直接的降维方法,实现简单,也易于STAP技术的工程应用。
ΣΔ-STAP技术是一种特殊的降维处理方法,它只有Σ波束支路与Δ波束支路2个空域自由度。ΣΔ-STAP技术在时域上采用EFA(extended factored space-time processing for airborne radar systems)降维方法[3],其结构框图与EFA相同,只需将列子阵换成Σ波束支路和Δ波束支路。
图2中,实线表示Σ波束,虚线表示Δ波束。时域自由度是3个相邻的多普勒通道,将目标多普勒通道作为中间通道,在中间通道的两侧各放置一个辅助通道。Σ波束、Δ波束在3个多普勒通道的输出分别为
XΣ=(xΣ(k-1),xΣk,xΣ(k+1))T
(1)
XΔ=(xΔ(k-1),xΔk,xΔ(k+1))T
(2)
式中:xΣn、xΔn分别表示Σ波束、Δ波束在3个多普勒通
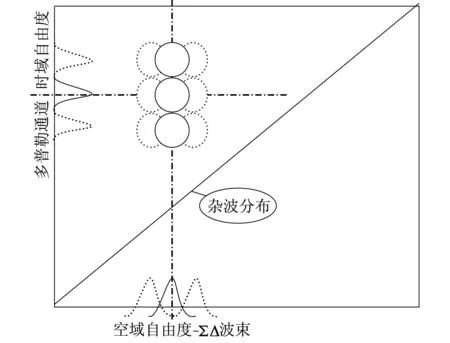
图2 ΣΔ-STAP技术示意图Fig.2 Schematic diagram of ΣΔ-STAP technique
道的输出,n=k-1,k,k+1。整个自适应数据矢量可以写成
(3)
目标信号的导向矢量
(4)
注意到,理想情况下Δ波束支路在主波束指向上响应很低,导向矢量中的Δ波束支路分量均设为零。杂波的协方差矩阵R可以写成
(5)
自适应处理的权系数矢量
(6)
ΣΔ-STAP技术对STAP技术做了大大简化,空域自由度为2,时域自由度为3,计算量较小,实现方便。
2 幅相误差对基于ΣΔ-STAP技术的机载雷达性能的影响
2.1 理想情况下的天线方向图
如图1所示,方位角θ、俯仰角φ和锥角ψ的关系为cosψ=cosθcosφ,无幅相误差时,天线方向图是锥角ψ和俯仰角φ的函数,即:
(7)

P0(u,v)=|E0(u,v)|2
(8)
式(7)还可以写成如下等效形式:
(9)
式中:Esb(v)为列子阵方向图函数。式(9)表示一种子阵级的权控,只控制相对于天线轴锥角的方向图。图3为理想情况下天线方向图。

图3 理想情况下的天线方向图Fig.3 Ideal antenna pattern
2.2 有幅相误差时的天线方向图
第2.1节中描述了理想情况下的天线方向图,实际中不可避免地存在误差,本节讨论天线阵元幅相误差对天线方向图的影响。子阵单元存在独立的幅相误差时方向图为
exp(j((n-1)u+(m-1)v))
(10)

E(E(u,v))E(E*(u,v))
(11)
E(E(u,v)E*(u,v))为有误差的功率方向图均值,用P(u,v)表示;在误差不是太大时(<10%),E(E(u,v))≈E0(u,v),E(E*(u,v))≈E0(u,v),E(E(u,v)E*(u,v))可看作P0(u,v)。因此,式(11)可以改成如下等效形式:
(12)

假定以下2组不同幅相误差:①δmn=5%,εmn=3°;②δmn=10%,εmn=6°。改变幅相误差大小,方位和俯仰主平面方向图会发生改变。图4(a)、(b)分别是不同幅相误差时Σ波束、Δ波束的方位主平面方向图,图4(c)、(d)分别是不同幅相误差时Σ波束、Δ波束的俯仰主平面方向图。
由图4可知,加权较深的天线实际所能达到的副瓣电平主要由幅相误差决定,并且波瓣结构呈现一定的随机性。幅相误差的存在不仅使Σ波束、Δ波束的副瓣电平抬高,也使Σ波束、Δ波束的零点移动,导致回波数据的非均匀性和杂波维数的增加,不利于ΣΔ-STAP的杂波抑制。
2.3 不同幅相误差时的雷达性能比较
设置如下雷达仿真参数:载机高度5 km,阵元数40,脉冲数16,输入杂噪比50 dB,载机速度180 m·s-1。图5给出了不同幅相误差时的改善因子。从图5可以看出,当存在幅相误差时,ΣΔ-STAP技术的检测性能较理想情况要低,并且幅相误差越大,改善因子下降越多。

图4 有幅相误差时的天线方向图Fig.4 Antenna pattern with consideration of amplitude-phase error in element

图5 不同幅相误差时的改善因子Fig.5 Improvement factor under different amplitude-phase errors in elements
3 结语
本文对某机载雷达采用的ΣΔ-STAP技术展开研究。针对机载雷达相控阵天线实际中总存在幅相误差的特点,首先分析了幅相误差对天线方向图的影响,然后进行了仿真实验。结果表明,幅相误差越大,雷达性能下降越严重。