基于机器视觉的列车外齿轮磨损状态检测方法
2019-01-18李艳凤曹旭阳陈后金张林林
李艳凤,曹旭阳,陈后金,张林林,杨 娜
(1. 北京交通大学电子信息工程学院,北京 100044;2. 中北大学信息与通信工程学院, 山西太原 030051)
齿轮是列车中的一种重要传动部件,其运行状态好坏直接关系到列车的运行安全。目前在铁路系统中,齿轮磨损状态的检测主要依靠人眼观察的方法。齿轮由多个齿面组成,邻近齿面会遮挡视线和光线。同时齿轮表面点蚀位于齿轮啮合区域中,啮合区域具有较强的反射特性,造成仅在某些特定的角度可以观察到点蚀。由于上述因素的影响,人眼观察确定齿轮的磨损状态存在较大的误差。为解决人眼观察方法的局限性,许多无损检测技术[1-3]开始应用于磨损状态检测,最常见的技术主要是振动信号分析和机器视觉。
在振动信号分析中,时间同步平均TSA (Time Synchronous Averaging)技术可以在降低噪声影响的同时对目标物体的信号进行提取[4]。文献[5]使用TSA技术得到每个齿的振动信号,基于频域分析提取信号特征,实现每个齿损伤状态的检测。文献[6]使用非抽取小波变换UWT (Undecimated Wavelet Transform)去除图像噪声,使用解析小波变换AWT(Analytic Wavelet Transform)提取信号的特征实现缺陷的识别与定位。文献[7]分别在时域和频域对每个齿的信号提取特征,采用支持向量机SVM (Support Vector Machine)分类器将其分为正常或损伤。振动信号分析主要用于循环疲劳试验,将其直接应用于齿轮磨损状态检测存在一些局限性。首先振动信号分析一般将齿面分类为正常或损伤,其不能给出每个齿面的定量磨损程度。另外振动信号是一维信号,其并不直观,工作人员很难根据信号判断算法给出的分类结果是否存在较大误差。
基于机器视觉的方法首先采集待分析物体的图像,然后采用图像分割等方法实现缺陷的检测,是一种较为广泛的物体表面缺陷检测技术[8]。阈值分割方法是目前实现缺陷区域检测的主要方法,包括自适应全局阈值分割和自适应局部阈值分割[9-15]。文献[9]提出一种铁轨表面缺陷检查方法,该方法对图像进行对比度增强,采用加重比例最大熵阈值PEME(Emphasized Maximum Entropy)分割方法实现缺陷区域的分割。文献[12]使用加权目标方差对Otsu方法进行改进,用于缺陷检测。文献[13]对图像进行对比度增强,基于Gabor滤波实现铁轨表面的缺陷检测。文献[14]设计了一种汽车伞齿轮缺陷检测方法,该方法采用邻域平均差值NAD(Neighborhood Average Difference)算法实现齿轮表面缺陷检测。文献[15]设计一种列车外齿轮缺陷检测方法,通过多阈值分割和凸包分析实现齿轮表面啮合区分割,采用自适应阈值和形状分析检测表面点蚀区域。
另一类实现缺陷检测的方法是基于学习的方法[16-19]。文献[16]提出一种热轧钢表面缺陷检测方法,采用小波变换提取图像特征,利用支持向量机实现缺陷区域的检测。文献[18]提出一种基于深度卷积神经网络的铁轨表面缺陷检测方法,该方法将原始图像作为输入,使用卷积神经网络将图像分为正常以及多种缺陷类型。文献[19]使用霍夫变换定位图像中的铁轨区域,基于形态学处理方法得到候选缺陷区域,采用Haar-like特征和AdaBoost分类器将候选区域分类为正常和多种缺陷类型。
现有的缺陷检测方法多用于齿轮循环疲劳试验或铁轨表面缺陷检测,仅文献[14-15]用于齿轮表面缺陷检测。为了实现基于机器视觉的列车外齿轮表面磨损状态的定量检测,需要采集齿面图像,对图像中的啮合区以及点蚀区域进行分割,磨损程度采用二者的面积比进行计算。文献[14]用于汽车伞齿轮的缺陷检测,该方法仅对齿轮的缺陷区域进行分割,不涉及啮合区分割。文献[15]用于列车外齿轮的磨损状态检测,但该方法在啮合区分割上存在一定的局限性。该方法会将部分灰度值较高的背景区域分割为啮合区域,对于啮合区顶部或者底部灰度值较低的情况,该方法会将此部分啮合区分割为背景。为解决文献[15]存在的问题,本文提出一种新的外齿轮表面磨损状态检测方法。为避免将顶部和底部低灰度啮合区分割为背景,且得到完整的啮合区域,本文结合分块分割、区域合并以及边缘修正,实现齿面图像的啮合区域分割。为适应不同点蚀区域具有不同灰度值的情况,本文结合自适应局部阈值以及形状特性,实现齿面图像的点蚀区域检测。
1 图像获取
1.1 图像获取
本文采用CCS光源提供照明,使用工业相机实现图像的采集,光源和相机位于齿轮的两侧。由于相邻齿会对光源进行遮挡,在拍摄时,相机从侧面对每个齿面进行图像采集。为了拍摄每个齿轮所有齿的齿面图像,将齿轮固定在转动平台上,转动平台以固定速度转动。每隔固定的时间间隔触发一次相机,实现当前齿面图像的拍摄。平台转动一圈即可实现所有齿面图像的采集。
由于齿轮表面的反射特性,啮合区一般较为光滑会反射更多的光照,因而在齿面图像中,啮合区呈现高灰度值特性。齿轮表面的其他区域一般较为粗糙,因而在图像中呈现低灰度特性。点蚀是位于啮合区的凹坑区域,其反射的光照较少,因而在齿面图像中,点蚀区域呈现低灰度值特性。采集的图像如图1所示。

图1 齿轮图像
1.2 整体方法
由于背景、啮合区以及点蚀区域具有不同的灰度值,本文采用基于阈值的方法实现啮合区以及点蚀区域的分割。正确实现啮合区以及点蚀区域的分割主要有以下难点:
(1) 靠近光源的啮合区部分具有较高的灰度值,远离光源的啮合区部分灰度值相对较低。
(2) 当点蚀区域位于啮合区的边缘部分时,采用阈值方法会造成啮合区不完整分割。
(3) 点蚀区域具有不同的深度,不同深度的点蚀区域在图像中呈现为不同的灰度值。
本文提出结合分块分割、区域聚合以及边缘修正的啮合区分割方法。分块分割可以避免将低灰度值的啮合区检测为背景,得到候选啮合区域。区域聚合算法识别候选啮合区中的啮合区区域,并将其合并为一个整体,得到初始啮合区域。基于啮合区的形状特性对啮合区边缘进行修正,解决点蚀位于啮合区边缘造成的不完整分割问题,得到啮合区最终分割结果。
由于不同点蚀区域具有不同的灰度特性,采用全局分割方法并不合适。同时修正后的啮合区边缘部分会包含少量低灰度值的背景区域,该区域与点蚀具有相似的灰度特性。本文采用自适应局部阈值分割得到候选点蚀区域,基于形状特性去除候选区域中的假阳性FP(False Positive)区域。
2 啮合区分割
2.1 候选啮合区分割
在采集的齿面图像中(图1),啮合区呈现高灰度值特性,然而由于不同齿面具有不同的反射特性,采用固定阈值分割不同齿面图像的啮合区并不适用。此外,啮合区上部和底部的灰度值可能会低于啮合区中间部分的灰度值。本文提出基于分块分割算法得到候选啮合区域。先去除图像中的光源区域,基于多阈值分割和形状相似性对图像进行方向归一化,得到类啮合区域。最后对顶部和底部的类啮合区域进行修正,得到候选啮合区域。
图像中光源区域的灰度值由光源的亮度和相机的光圈决定,对于不同的齿面图像,光源区域的灰度值是相同的。但与光源区域连通的齿面区域具有不同的灰度值,本文采用迭代阈值和面积分析确定断开光源与齿面区域的阈值Tp。在采集的齿面图像中,啮合区域的灰度值在60到100之间,因此初始阈值设为60,然后迭代加10。当阈值使得光源区域和齿面区域断开时,其分割结果将包含两个较大面积的连通区域,一个连通区域是光源,另一个连通区域是啮合区域。因此当迭代阈值分割结果中出现两个面积大于Amin的连通域时,则该阈值为Tp,分割结果如图2(a)所示。采集的齿面图像中,光源面积大于齿轮啮合区域的面积,因此Amin的取值根据啮合区的面积设置。本文采集的图像中,啮合区域面积的最小值为10 000,考虑到点蚀区域可能使得啮合区被分割为多个区域,因此Amin的取值应小于啮合区的面积,本实验Amin=8 000,即最小面积的0.8倍。光源位于齿轮的上部,因而连通区域中顶点所在行较小的区域为光源区域,去除光源后的齿面图像如图2(b)所示。
去除光源和小面积区域的分割结果定义为BW,如图2(c)所示。在图2(c)中,齿面的方向是一倾斜角度。在后续啮合区修正以及点蚀检测方法中,要求齿面在图像中是垂直角度,因而需要对图像进行旋转。由于齿面的角度与啮合区的角度相似,采用啮合区分割结果计算角度并实现图像的方向归一化。在图2(c)中,部分背景区域与啮合区域粘连,若直接采用图2(c)的分割结果计算啮合区角度,由于不同齿面的粘连程度不同,因而其角度误差会有较大的差异。为了降低角度计算的误差,采用多阈值分割与形状相似性去除粘连的背景区域。
使用[Tp+10,Tp+20,Tp+30,Tp+40]对去除光源后的图像进行分割,每个阈值将得到一个二值模板图像。当阈值由小到大变化时,分割结果会呈现不同的形状。将粘连区域与啮合区断开的阈值定义为最优阈值To。当阈值大于To时,啮合区的外围区域将被分割为背景,此时分割结果的外轮廓与最优分割结果的外轮廓相似。当阈值小于To时,背景区域与啮合区粘连,此时分割结果的外轮廓与最优分割结果的外轮廓差异较大。据此,通过分割结果的形状相似性确定To。
令B1=BW,多阈值分割结果为B2到B5。首先对Bi进行形态学填充和开运算,由于啮合区的形状并不平滑,对形态学处理后的二值图像进行凸包运算,运算结果记为BH={BHi,i=1,…, 5}。采用豪斯道夫Hausdorff距离[20]计算形状相似性。BHi中边缘点与BHj中边缘点的距离H(i,j)为

( 1 )
式中:Pi和Pj分别为BHi与BHj中的边缘点集合;d(p,q)是p和q两点之间的欧氏距离。最优分割结果BHo(图2(d))定义为与其邻近的分割结果具有最小的豪斯道夫距离。

( 2 )
基于最优分割结果BHo计算啮合区的角度,对图像进行旋转,使得齿面为垂直方向。采用主成分分析PCA(Principle Component Analysis)[21]方法计算啮合区的角度。将BHo中啮合区的位置坐标[xi,yi]做为PCA的输入,其输出为具有最大投影方差的向量v,该向量即为啮合区的角度。基于向量对图像进行旋转,得到结果如图2(e)所示。旋转后的BHo记为类啮合区分割结果。


图2 齿轮图像方向归一化
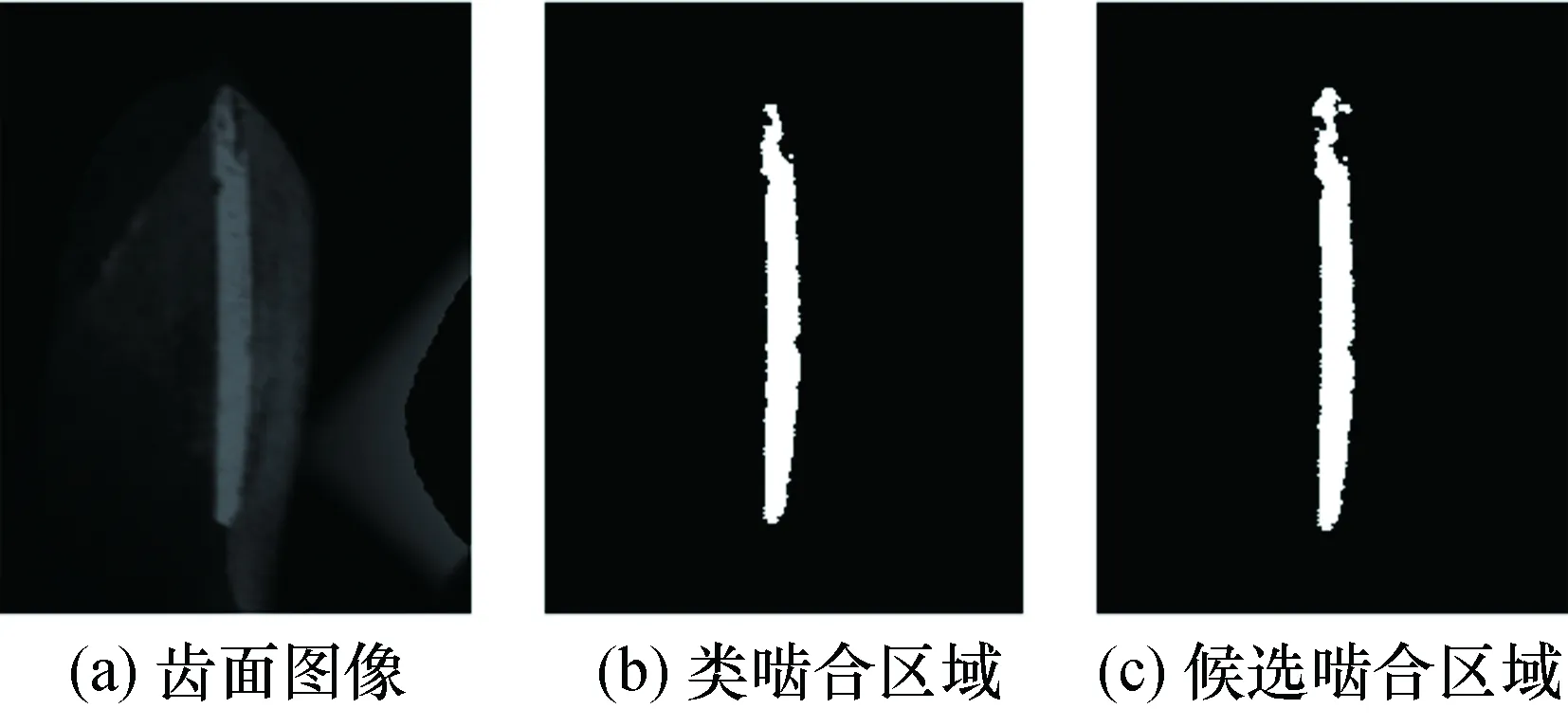
在部分齿面图像中,啮合区的顶部和底部灰度值较低,可能被分割为背景区域,如图3(b)所示。为降低啮合区的分割误差,在类啮合区分割结果基础上,对此部分进行分割,得到候选啮合区域。首先判断顶部和底部区域分割结果是否正确,若分割不正确,则对结果进行修正。相同型号齿轮中,不同齿面具有相同的高度,因此不同齿面啮合区域的高度基本相同,采用类啮合区分割结果的高度Hei可以判断类啮合区分割是否正确,当式( 3 )满足时,则判断类啮合区分割不正确。
Hei ( 3 ) 阈值Th1的取值由齿轮啮合区的高度确定,考虑部分齿面图像中,顶部或底部啮合区与背景灰度值相似,因此Th1的取值应小于啮合区高度。本实验所用齿轮啮合区在图像中的高度大约为430,因此Th1可以设置为400。对于不正确分割结果的修正,以顶部区域为例,给出修正过程。令BS1为类啮合区分割结果,以[To-10,To-20]对顶部区域进行分割,并以分割结果代替BS1中的顶部区域,得到分割结果BS2和BS3。当分割结果中包含粘连背景区域时,连通域的宽度会发生较大的改变,因此综合考虑高度和宽度差,修正后的分割结果应为满足式( 4 )时的BSi-1。 ( 4 ) 式中:Wid(BSi)和Hei(BSi)分别为BSi的宽度和高度。参数Tw取值较大时,修正结果中将包含粘连背景区域;取值较小时,修正结果中部分啮合区域可能被分割为背景。当分割结果未出现粘连背景时,连续两次分割结果中连通域的宽度改变较小,因此Tw的取值应较小,本实验中取Tw=10。对于底部区域的修正,其过程与顶部区域修正过程相同。修正后的分割结果为候选啮合区域,如图3(c)所示。 图3 候选啮合区域分割 在如图4(b)所示的候选啮合区分割结果中,点蚀区域会导致啮合区被分为多个小区域,同时部分灰度值较高的背景区域会被分割为与啮合区粘连的区域。为了去除候选啮合区的背景区域且将啮合区分割为一个整体,提出一种区域聚合方法。首先采用粘连区域去除方法使背景区域和啮合区域分离,然后采用区域选择方法从分割结果中选择属于啮合区域的所有区域,最后设计区域连接方法,将所有啮合区域合并得到一个完整区域。 经过方向归一化,所有齿面图像中的啮合区域均为垂直方向。采用90°方向的线型结构体对候选啮合区二值模板图像进行开运算,则可断开背景区域和啮合区域的连接。由于啮合区域可能会分为多个小区域,若直接对整个二值图像进行开运算,则小区域将被去除,因此仅对候选啮合区域中面积最大的连通域进行开运算。不同齿面图像中,粘连区域的宽度可能不同,为了适应不同宽度的粘连情况,采用具有不同长度rj的90°方向线型结构算子Se={Se1,Se2,…,Sen}进行迭代开运算处理。长度为rj的开运算处理结果记为BMj,当粘连区域断开时,相邻两次处理结果BMj和BMj-1在宽度、最左侧位置以及最右侧位置上将不会发生改变。据此,当式(5)满足时,BMj即为粘连区去除后的结果,如图4(c)所示。 ( 5 ) 式中:Wid(BMj)为BMj的宽度;RM(BMj)和LM(BMj)分别为BMj的最左侧列所在位置以及最右侧列所在位置;γ为参数,本实验中γ=5。 将候选啮合区域图像减去BMj,得到差值图像,如图4(d)所示。差值图像中同时包含啮合区域以及背景区域,因此设计区域选择方法将背景区域去除。由于后续通过边缘修正对啮合区分割进行处理,差值图像中小面积的连通域将不影响啮合区最终分割结果,因此去除差值图像中面积小于TMA的连通区域。本实验中,TMA=50。 去除小面积后,对差值图像中的连通区域按照顶部行所在位置进行升序排序,得到Reg={Regi}。首先令啮合区域Mesh=BMj,啮合区域的宽度用Wid表示。每次将Regi添加到啮合区域中,然后计算区域的高度和宽度,记为Widi和Heii。当啮合区域中加入背景区域时,将使得啮合区域的宽度发生改变,或者啮合区的高度超过阈值。因此当式( 6 )满足时,区域Regi被保留。 ( 6 ) 式中:Tw为宽度参数,与2.1节中的Tw是同一参数;Th2为高度参数,其取值由啮合区的高度确定。本实验所用齿轮啮合区在图像中的高度为430,为保证区域聚合方法找到差值图像中全部的啮合区域,Th2的取值应略高于430,本文中Th2=450。区域选择方法的具体过程如下,其方法流图如图5所示。 输入集合Reg={Regi},啮合区Mesh以及其宽度Wid,i=1。 步骤1令Mesht=Mesh∪Regi并计算Mesht的宽度Widi和高度Heii。 步骤2如果Widi和Heii满足式( 5 ),则令Mesh=Mesht,并重新计算Mesh的宽度Wid,否则令i=i+1,并返回步骤1。 输出区域选择结果Mesh。 区域选择结果如图4(e)所示。图4(e)中,啮合区被分割为多个小区域,形态学闭运算可以连接断开的区域,因此基于闭运算设计区域连接方法将啮合区聚合为一完整区域。观察啮合区分割结果可得,在垂直方向上连接多个小区域可以实现区域连接为一个整体,且不改变啮合区的边缘。不同齿面图像中,区域之间的距离并不相同,因此采用不同长度90°方向的线型结构算子Se={Se1,Se2,…,Sen}对Mesh进行闭运算。长度为rj的结构算子对应的闭运算结果记为BCj。当BCj中连通区域的个数为1时,所有啮合区域被连接形成一个完整的区域,区域连接结果如图4(f)所示。 图4 区域聚合 图5 区域选择方法流图 当点蚀区域位于啮合区的边缘区域时,将得不到完整的啮合区分割结果,如图4(f)所示。为解决不完整分割的问题,提出基于凸包运算和形状分析的边缘修正方法。 由于啮合区是凸边形,通过对分割结果进行凸包运算,可以修正因点蚀造成的啮合区未完整分割问题。对图4(f)进行凸包运算后的结果用BR表示,如图6(a)所示。凸包运算在修正啮合区的同时会引入较小或细长形状的背景区域,本文通过形状和面积特性对背景区域进行去除。 首先将凸包运算后图像BR与运算前图像BC相减,然后分析差值图像中每个连通区域的面积和宽度,以判定该连通区域是否需要从BR中去除。如果连通区域面积小于TMA,则去除该区域。该参数与2.2节中的TMA是同一参数。如果连通区域面积大于TMA,则计算区域的宽度,如果区域宽度小于Tw,则去除该区域。由于啮合区域不是矩形区域,直接采用列的差值作为区域宽度误差较大。本文基于PCA计算连通区域的角度,将坐标投影在该角度上,投影后坐标列的差值即为区域宽度。背景去除后的啮合区域如图6(b)所示,啮合区的边缘分割结果如图6(c)所示。 不同深度的点蚀具有不同的灰度值,首先采用自适应局部阈值分割得到候选点蚀区域[15],然后基于形状特性去除候选区域中的假阳性区域。 由于点蚀区域在图像中呈现低灰度值,令 fi,j=255-Ii,j ( 7 ) 式中:Ii, j是像素点(i,j)的灰度值。在fi, j中,点蚀区域具有较高的灰度值。对于每个像素点(i,j),计算其局部平均灰度值mi, j ( 8 ) 式中:l是窗口的大小,本实验中l=12。像素点(i,j)的局部方差vi, j为 ( 9 ) 对于每个像素点(i,j),阈值设置为mi, j+αvi,j。参数α的取值越大,则方差对阈值的影响越大,可能导致点蚀区域的边缘点被检测为非点蚀区域,比较合适的取值范围是0.1到0.3之间,本文实验α=0.1。候选点蚀区域BDi,j由式(10)计算,分割结果如图7(b)所示。 (10) 由图7(b)可以看出,候选点蚀区域中存在部分非点蚀的假阳性区域。这些假阳性区域可以分为两类,一类是噪声和灰尘,另一类是啮合区边缘部分的背景区域。对于噪声和灰尘区域,其面积较小,且位于啮合区域的内部。啮合区边缘部分的背景区域包括孤立区域以及和点蚀相连的区域。在去除和点蚀相连的假阳性区域时,首先需要断开假阳性区域和点蚀区域的连接,断开连接后的假阳性区域具有细长的形状特性。据此,假阳性区域去除通过面积阈值和宽度阈值实现,具体过程如下: 步骤1对于BD中每个连通区域Ci,如果面积小于TMA,则去除该区域,否则进入步骤2。 步骤2基于Ci与啮合区的边缘是否有重合部分,判定Ci位于啮合区的内部还是外围。若位于外围区域,则计算其区域宽度,如果区域宽度小于Tw,则去除区域,否则进入步骤 3。 步骤3判断Ci位于啮合区的左侧还是右侧,若位于左侧,则计算Ci最左侧点所在的列,若位于右侧,则计算Ci最右侧点所在的列,记为Col。 步骤4采用半径为2的圆形结构算子对Ci进行开运算,得到BF,以断开假阳性区域和点蚀区域的连接。若Ci位于左侧,则提取BF中列Col到列Col+N所在的区域。若Ci位于右侧,则提取BF中列Col-N到列Col所在的区域,提取区域用BFe表示。本实验中N=10。 步骤5对于BFe中每个连通域CEi,如果面积大于TMA且区域宽度大于Tw,则保留CEi。 步骤6将Ci从候选点蚀区域BD中移除,并添加步骤 5中保留的区域,得到最终的点蚀检测结果,如图7(c)所示。点蚀区域的边缘分割结果如图7(d)所示。 图7 点蚀检测 以140幅齿面图像作为实验数据,从啮合区域分割以及点蚀区域检测两方面对本文提出的算法进行验证。 文献[15]给出了齿轮啮合区分割算法,因而选择文献[15]与本文提出方法进行比较。首先给出定性实验结果比较,然后给出基于面积重合率AOM(Area of Overlap Measurement)的定量实验结果比较。手动分割结果A与自动分割结果B的AOM由式(11)计算。AOM等于1表示完成重合,AOM等于0表示没有重合。 (11) 对于啮合区与背景毛刺粘连的情况,如图8(a)所示。本文提出方法包含了粘连区域去除算法,因而啮合区分割结果中不会包含毛刺背景,如图8(b)所示。对于点蚀区域位于啮合区边缘区域的情况,如图8(c)所示。本文提出方法设计了区域聚合和边缘修正算法,因而可以得到完整的啮合区分割结果,如图8(d)所示。 图8 啮合区分割结果 对于部分齿面图像,其顶部或底部的啮合区灰度值较低,如图9(a)所示。对于此种情况的啮合区分割,文献[15]将低灰度啮合区分割为背景,如图9(b)所示。本文提出方法采用分块分割得到候选啮合区域,因而可以得到正确的啮合区分割结果,如图9(c)所示。 图9 底部低灰度值啮合区分割结果 由于齿面磨损程度以及光照条件的影响,部分非啮合区的背景区域会呈现较高的灰度值,如图10(a)所示。文献[15]方法将这些背景区域分割为啮合区域,如图10(b)所示。本文方法设计了区域聚合算法,因而可以实现啮合区域的正确分割,如图10(c)所示。 图10 高灰度值背景啮合区分割结果 对于啮合区域分割,本文方法的平均AOM是0.89,文献[15]的平均AOM是0.87。上述实验结果表明,本文提出的啮合区分割方法优于文献[15]给出的方法。 由于表面点蚀很难通过人工标记准确确定其边缘,本文仅给出表面点蚀检测定性结果比较。选择文献[9]的PEME阈值分割算法,文献[12]的改进Otsu算法以及文献[14]的NAD算法进行比较。首先采用这3种算法得到候选点蚀区域,然后利用本文给出的假阳性去除方法去除假阳性区域。 由图11(a)和图11(b)可以看出,文献[9]和文献[12]算法不能检测出灰度值较高的点蚀区域, 其原因为这两种方法为全局阈值分割方法。文献[14]算法是局部阈值分割方法,因而可以得到较好的点蚀区域检测结果,如图11(c)所示。然而该方法没有考虑像素点灰度值的方差,因而存在过分割现象。本文提出的方法同时考虑局部均值和方差分割点蚀区域,因而适用于不同灰度值和不同对比度点蚀区域的检测,如图11(d)所示。 图11 点蚀分割结果比较 本文提出一种基于机器视觉的列车外齿轮磨损状态定量检测方法。结合分块分割、区域聚合以及边缘修正,实现齿面图像啮合区域分割。分块分割可以避免将低灰度的啮合区检测为背景;区域聚合可以避免将高灰度值的背景分割为啮合区,并将啮合区合并为一个整体;边缘修正可以避免点蚀区域位于啮合区边缘造成的不完整分割。结合自适应局部阈值以及基于形状特性的假阳性去除算法,实现了齿面图像的点蚀区域检测。在140幅齿面图像上对提出方法进行验证,啮合区分割的平均AOM为0.89,点蚀区域检测方法性能优于现有方法。本文提出的齿轮磨损检测系统受图像采集设备影响较大,需要调整CCS光源以及相机的位置以获取高对比度的图像。另一方面本文中的一些参数取值与齿轮结构相关,当对其他齿轮进行检测时,需要改变这些参数取值。后续工作将研究图像采集系统的优化以及算法普适应的问题。
2.2 区域聚合





2.3 边缘修正
3 表面点蚀检测
3.1 候选点蚀区域检测

3.2 假阳性去除


4 实验结果及讨论
4.1 啮合区分割结果与讨论




4.2 表面点蚀检测结果与讨论


5 结束语