仿人机械手触觉传感器的设计
2019-01-17李涛谢东吴昊王俊豪王克洁
李涛,谢东,吴昊,王俊豪,王克洁
(铜陵学院电气工程学院,安徽铜陵244000)
通信作者:谢东(1968— ),男,博士,教授,xdy@tlu.edu.cn。
随着工业自动化水平的不断提高,可以感知三维力的机械手成为研究热点。机械手研究的一个核心问题是设计出性能良好的传感器,以测量来自不同方向的触觉与滑觉信号。本文选用聚偏二氟乙烯(PVDF)压电薄膜作为传感器的材料,构成基于压电效应的传感器。该传感器柔软,重量轻,频带宽,可无源工作。当我们拉伸或压缩压电薄膜时,在薄膜的两极表面间会产生一个电荷信号或者电压信号,该信号正比于压电薄膜拉伸或压缩的形变量。如果压电传感器被设置成三维的空间结构,就可感受来自不同方向上的应力。本文以PVDF压电薄膜为感应材料,设计了仿人机械手的触觉传感器。分析与测试结果表明,本文所设计的触觉传感器能使仿人机械手清晰地区分出三维的触觉和滑觉信号,从而有效地判断出相应的感觉信息。
1 PVDF压电薄膜工作原理
PVDF是灵敏性高、化学稳定性高的高分子聚合物。给PVDF压电薄膜施加应力使其产生形变时,薄膜内部的电荷会被极化而向两极移动,其两个相对表面上汇聚大小相等、符号相反的电荷,且产生的电荷数量与形变量成正比[1]。外力撤去后,极化电荷又恢复到初始状态,此时PVDF压电薄膜不带电。另外,极化电荷的极性随着所加外力方向的改变而改变,这时候的传感器等同一个用压电材料做电介质的电容。表1是PVDF的性能参数。
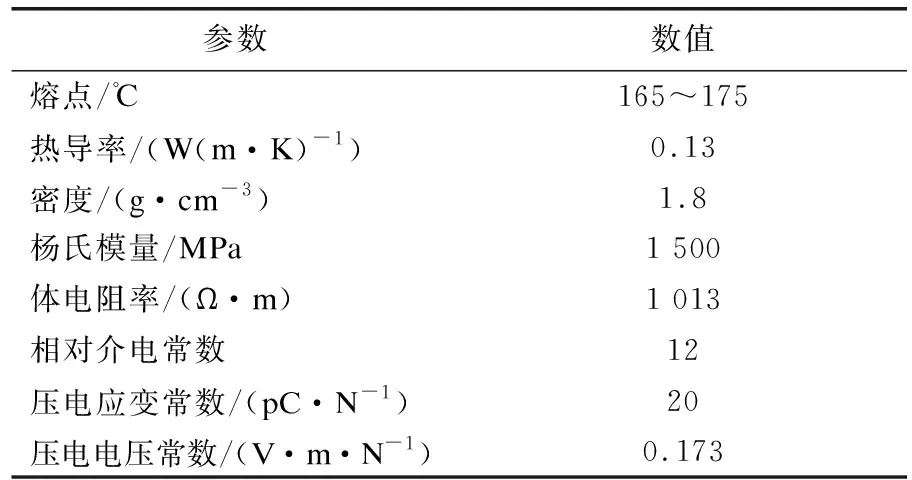
表1 PVDF的性能参数
在PVDF压电薄膜的上、下两面镀上电极,使其构成换能电容。当作用在薄膜上的应力发生变化时,换能电容两极产生的电荷量为
(1)
式中:Δq为单位面积上的电荷量;Δσj为应力变化量;d3j(j=1,2,3)为各方向的压电应变常数。
将换能电容接到图1中以R为输入电阻的放大器上,其压电效应方程为
(2)
式中,i是换能电容的漏电流。
对于换能电容上的一点(x,y),设其初始时刻电荷面密度是q(x,y,t0),则t时刻其电荷面密度为
(3)
设PVDF压电薄膜总面积为SP,则其电荷量为

假定PVDF压电薄膜只受到垂直方向的作用力,且所受应力均匀变化,则其电荷量为
Q(t)=Spd33exp [-t/(RC)]ε(t)
(5)
式中,ε(t)表示阶跃函数。
式(5)表明,PVDF压电薄膜上的电荷量按指数规律衰减,这是换能电容与放大器的泄漏造成的,可通过数据处理来补偿。
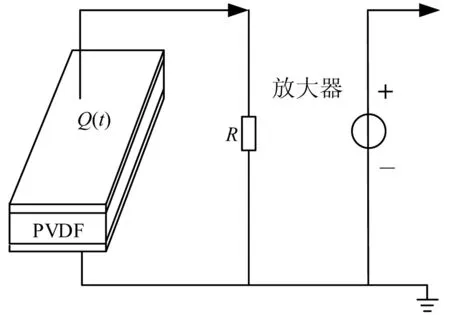
图1 PVDF压电薄膜换能模型
2 三维力触觉传感器设计与制作
为提升机械手的性能,本文设计了一种可以感受三维力的触觉传感器,设计重点在于设计出性能优良的传感头。图2为本文所采用的传感头结构,主要包括PVDF压电薄膜、四棱台及基座。
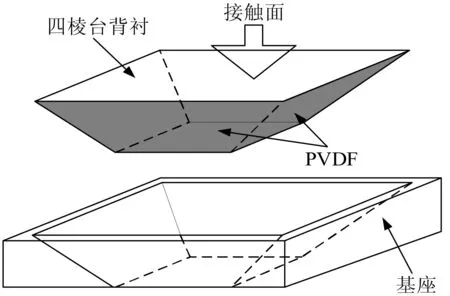
图2 触觉传感器的传感头结构
图2中,将PVDF压电薄膜粘贴在四棱台的4个侧面,可以有效获取接触面所受到的三维力信息。如果有外力F作用于四棱台的接触面,则外力F会按矢量法则分解,分别作用于四棱台4个侧面的压电薄膜上。各侧面压电薄膜产生的电荷量大小正比于所受到的力。对电荷量进行测量,即可算出各侧面上F的分力大小,进而获得物体在三维方向上的受力信息[2]。
本文所述触觉传感器的总体设计思路为:由传感头感知的反映触觉与滑觉的电信号,经信号调理电路预处理;再经模数转换后提供给计算机做进一步处理,以分析判断接触、滑动等动作行为;计算机输出的触觉与滑觉信号可通过示波器进行观察。传感器的工艺制作分为以下几个步骤。首先,根据所要求的传感头大小和形状对PVDF压电薄膜进行裁剪,并清除裁口留下的毛刺,这样可防止出现短路。其次,通过笔式热点焊法从薄膜内表面的电极上引出导线,将薄膜的下表面与基座平整粘合在一起,再将四棱台置于薄膜的上表面,注意接触面不要凸起,避免由于接触面所受应力不均匀而造成测量误差。然后,用导电胶对焊点作二次加固以防止焊点与薄膜电极层间接触不良,并在焊点周围用胶粘剂进行封装,以确保焊点与外界绝缘。最后,在印制线路板上制作信号调理电路,并将传感头、信号调理电路、计算机和示波器之间的连线接好,从而构成一个完整的触觉传感器测试系统。触觉传感器需置于机械手之中,传感头表面尺寸设定为5 mm×5 mm,而印制线路板做成长方形,尺寸为3 cm×2.2 cm,线路板上元件均为贴片封装。
3 信号调理电路的设计
当物体接触到PVDF压电薄膜或在其表面滑动时,首先要通过信号调理电路进行信号的转换、放大与滤波,这里详细介绍信号调理电路中电荷放大器和低通滤波器的设计方法。
3.1 电荷放大器
电荷放大器的作用是将PVDF压电薄膜产生的电荷信号转换为电压信号并放大,其电路如图3所示。

图3 电荷放大器
PVDF压电薄膜受压后,两个相对表面的正负电荷量较少且其输出阻抗高,导致很难精确地计算出其受力情况。为了弥补这一缺点,本文选择运算放大器件CA3140为核心构成高输入阻抗集成放大电路,将电荷信号放大为可以直接测量的电压信号[3]。在放大器可视为开路并且开环增益非常大的情况下,输出电压正比于薄膜的输出电荷,即
U1=KQ
(6)
式中,U1为集成放大电路的输出电压,K为开环增益,Q为PVDF的输出电荷。
正常情况下PVDF压电薄膜传感器的内阻最高可达1 TΩ,在受到动态应力并且频率小于100 Hz时,传感器的内阻降至10 ~100 MΩ。本文选用的CA3140作为高输入阻抗运放器件,其反馈电容为C1=0.1 μF,反馈电阻为R1=10 MΩ,其放大倍数为2 000左右。同时,还采用标准的运算放大器构成一个电压放大级,进行电压信号的进一步放大,使电压放大至适合于数据采集系统采集的-5~+5 V的范围。 通过测量放大后的电压,可准确地测出PVDF压电薄膜的受力情况。
3.2 低通滤波电路
PVDF压电薄膜的低频响应将最初微弱的电荷信号放大成较大的电压信号,它具有一定的信噪比,会干扰信号的测量,所以在将放大后的电压信号送到数据采集系统前需要进行信号的滤波处理,尽可能将噪声清除,保证测量结果的准确性。由于人体的动作频率通常小于100 Hz,因此满足要求的滤波器通频带范围应该为0.1~100 Hz。图4为本文所设计的低通滤波器的电路图,其截止频率为66.7 Hz,截止频率的计算公式为
(7)
4 数据处理与测试结果分析
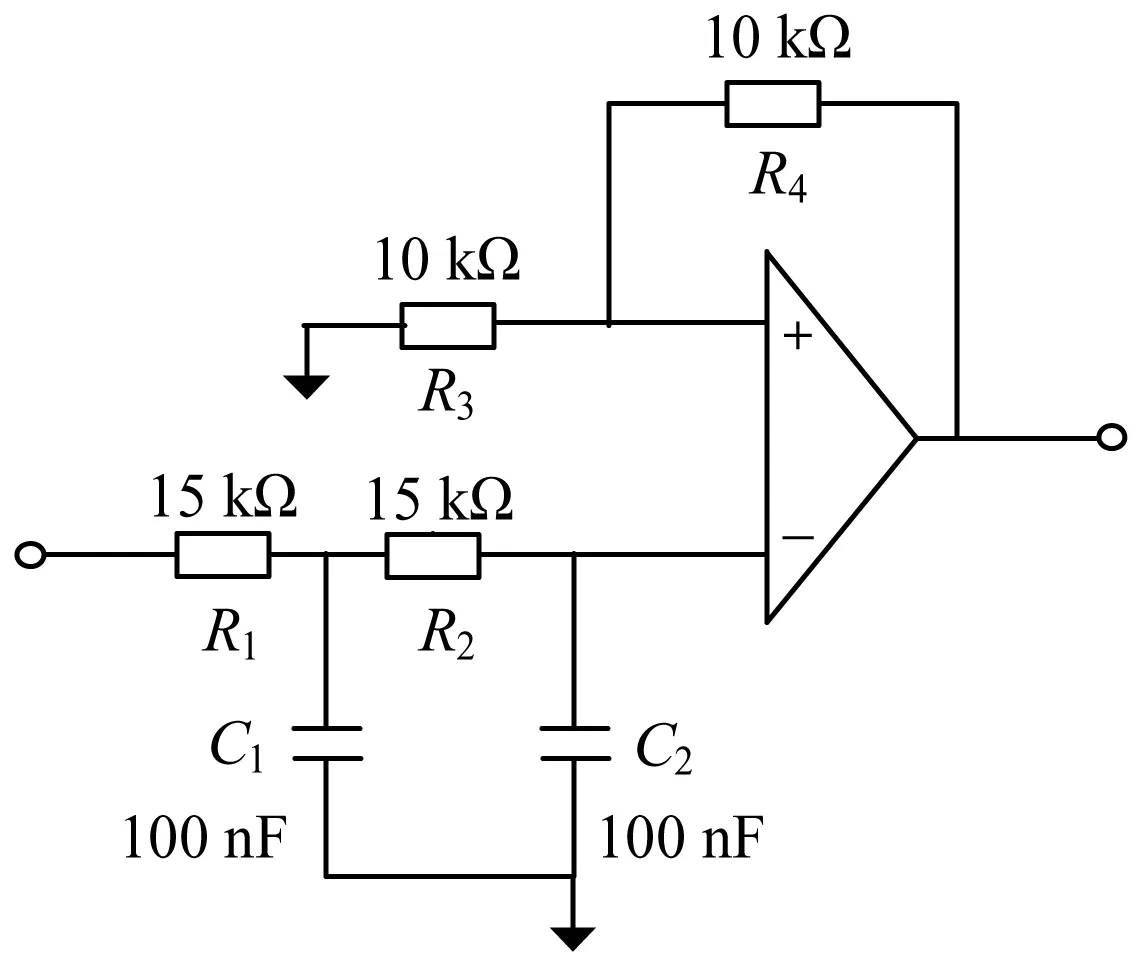
图4 低通滤波电路
从信号调理电路输出的信号需做进一步的数据处理,以分析触觉和滑觉信号的不同形态特征,本文采用特征值法来分析触觉和滑觉信号。由于物体对传感器的接触力与PVDF压电薄膜输出电压峰值具有线性关系,且响应速度很快,故采用信号均值作为触觉信号的特征值[4]。考虑到PVDF压电薄膜静态性能较差,夹紧速度慢时适当减小阈值,以补偿慢速夹紧物体时传感器输出信号的衰减。与触觉信号相比,滑觉信号具有持续交变性的特征,它是连续接触和释放信号的叠加,所以可采用信号方差作滑觉信号特征值。考虑到物体接触时方差与滑动时方差差别较小,需要严格控制采样周期,让采集到的滑动信号有一系列的峰值点。当微机系统检测到传感器输出信号有多个拐点且各拐点间差值满足阈值要求时,可判定有滑动产生。
为检验本文所设计的仿人机械手触觉传感器的实际效果,构建了触觉感知系统进行实验测试。测试方法如下:将以PVDF为感应材料的触觉传感器置于压力测试平台上,测试物体分别在传感器表面接触与滑动,通过示波器观察传感器触觉与滑觉信号的输出波形。实验波形如图5所示。
由图5(a)可知,传感器触觉信号的输出波形是单个大幅值的脉冲信号。图5(b)中传感器滑觉信号的输出波形,是一系列连续波动的小幅值信号,与触觉信号的输出波形有很大区别。图 5表明,以PVDF为感应材料的触觉传感器可有效感知物体的接触与滑动,并能够明显区分触觉信号与滑觉信号。
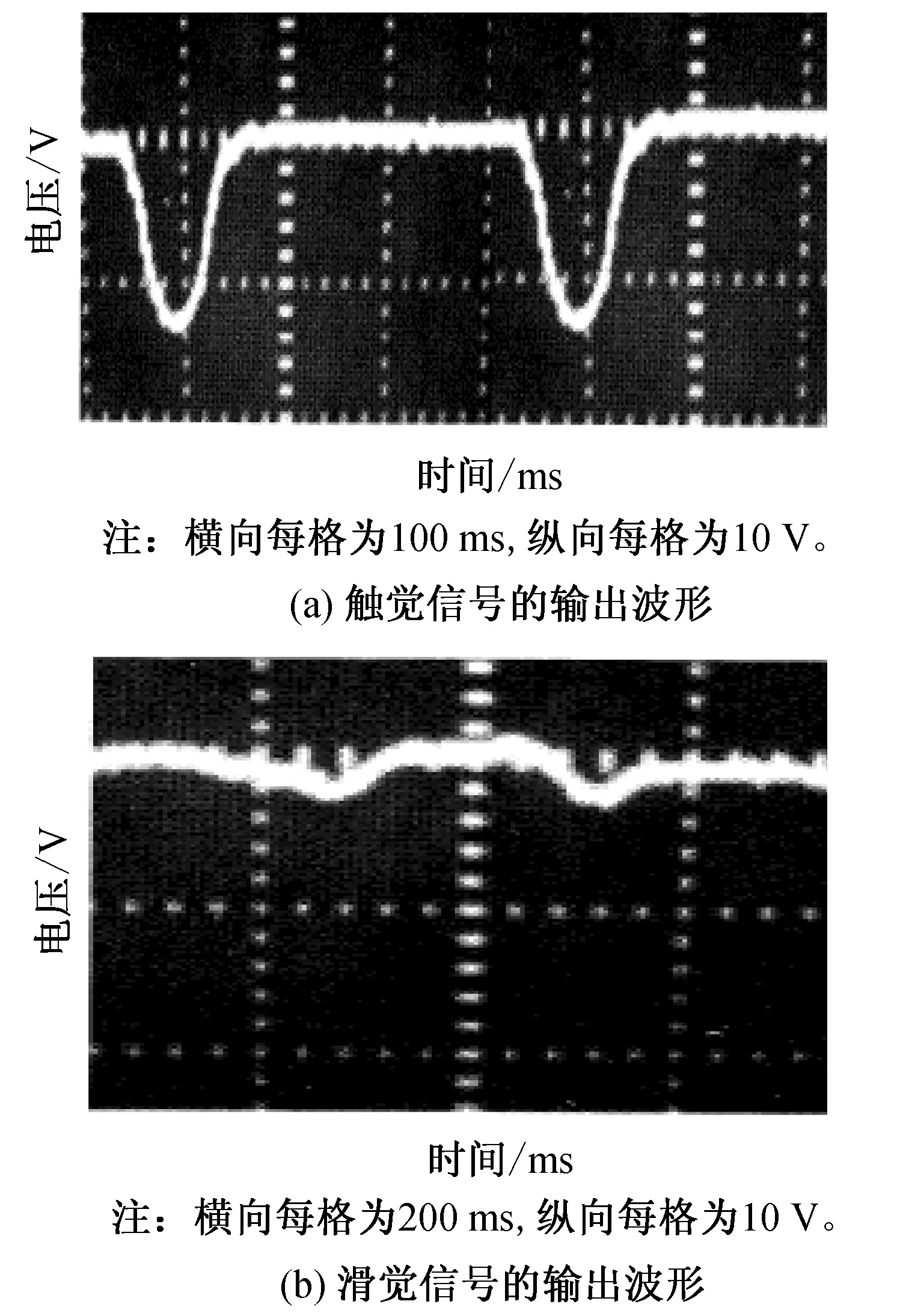
图5 触觉与滑觉实验波形
5 结论
为提高工业自动化水平,可以应用仿人机械手来代替人工进行危险枯燥的劳动。本文设计了一种可感受到三维力的触、滑觉机械手,它具有结构简单、生产成本低的特点,易于大量生产。理论分析与实验测试结果表明,本文所设计的仿人机械手触觉传感器具有合理性及可行性,能有效分析与判断触觉和滑觉信息,可代替人工操作。