长距离输送机保护开关监测与定位系统设计
2019-01-17李建志
李建志
(山西汾西矿业集团柳湾煤矿, 山西 孝义 032300)
引言
传统的保护开关监测与定位方法对保护开关以及保护开关的工作环境都有较高的要求。目前,长距离输送机的保护开关的工作环境比较恶劣,使保护开关很容易出现故障,增加了保护开关的更换与维修的频率,同时也降低了保护开关对输送系统的监测与保护[1-3]。本文采用了一种使用简单、耐用、低成本的开关作为保护开关来解决这一问题,并对保护开关进行监测与定位硬件设计[4]。
1 保护开关监测与定位系统的基本组成
保护开关监测与定位系统主要是由控制器、保护开关电路、通讯电路以及相应检测传感器电路组成。控制器是系统的核心,它通过电流传感器和电压传感器实时监测并保存保护开关电路的电压和电流数据,通过检测到的电流数据并根据相应的控制算法得出为保持保护开关电路恒流所需的占空比,在恒流完成的条件下,根据反馈回来的电压数据来确定是否有保护开关的状态发生改变即确定输送机系统是否有故障发生,并把相应的故障警报通过通讯电路发送到输送系统的控制中心[5-7]。与此同时控制器根据相应的公式计算出状态发生改变的保护开关序列号即确定了发生故障位置。功率开关器件控制着整个电路的开通与关断,使得单片机可以通过它完成对主电路的控制。LED显示和键盘控制实现了人机交流。通讯模块满足了保护开关监测与定位装置与其他设备的通信。整个系统的结构组成如图1所示。
2 保护开关监测与定位系统功能及原理

图1 输送机保护开关监测与定位系统的整体结构图
保护开关监测与定位系统的主要任务有两个,一是监测功能。当输送机开始工作的时候,实时监测着输送系统的所有保护开关,主要涉及到的有拉绳、跑偏、撕裂、料流等保护开关。当监测到某个保护开关的状态发生了改变时说明某个部位发生了故障,控制中心做出相应的反映,用以确保沿线工作人员的人身安全和生产线的安全生产。二是定位功能。由于大部分长距离输送机都工作在隧道、矿井等没有通讯能力的地方,所以准确定位事故发生地尤为重要。在确定故障发生的同时,保护开关监测与定位装置会立刻通过设定好的方法计算出故障发生的位置定位出故障发生处,并通过通讯总线将发生故障的位置发送给输送系统的控制中心。
3 保护开关监测与定位的方法
下面将通过基于恒流源的长距离输送机保护开关监测与定位的等效电路图(如图2所示),详细地阐述保护开关监测与定位的方法。

图2 基于恒流源的长距离输送机保护开关监测与定位的等效电路图
DC为直流电源,r为标准电阻,△r为每两个保护开关之间导线的电阻,I0为保护开关监测定位装置给外部保护开关电路提供的直流恒流源,U为外部保护开关电路的总电压。k1、k2、k3、…、k11均为普通的开关,它和一个标准电阻r构成一个保护开关。
3.1 保护开关监测的方法
当输送系统开始工作后,在没有故障发生位置的保护开关保持常开的状态,如果某个位置发生故

式中:m为状态发生改变的保护开关的序号;P为保护开关的总数目;Δr为两个保护开关之间的导线的电阻。
无论是否有故障发生,保护开关回路中的电流都为I0,那么此时开关监测定位装置内电压传感器监测的电压U1为:

在公式(2)中,I0为设定的恒定值,所以U1的取值决定于Rm。保护开关监测装置是根据监测到的电压U1来判断输送机系统是否有故障发生,根据公式(1)和(2)可知,U1的值取决于保护开关回路中的总电阻值Rm的取值。所以当故障发生后,开关监测定位装置所监测到的电压与没有发生故障时是不同的(超出由误差引起的电压波动范围),装置根据电压的变化情况向输送系统的控制端发送故障信号,然后控制输送机急停并等待故障处理。
3.2 保护开关定位的方法

假设状态发生改变的保护开关的序号为K,K的计算公式为:障,那么该位置的保护开关的状态由断开变为闭合,这将导致保护开关电路所串联的保护开关数目发生改变,保护开关电路的总阻值发生改变。设整个保护开关回路中串联的电阻的阻值Rm,保护开关回路中的阻值Rm分为两种情况。一种是没有故障发生即没有保护开关的状态发生改变,此时保护开关回路阻值为所有标准电阻与导线电阻的和;第二种为故障发生时即有保护开关的状态由断开变为了闭合,此时保护开关回路阻值为状态发生改变的保护开关到开关监测定位装置之间所有标准电阻和导线电阻的和。由此可知,Rm的表达式为:
式中,I1为保护开关监测定位装置内的电流传感器检测到得电流值;U1为电压传感器检测到的电压值;R为每个保护开关所等效的电阻值。
R的表达式为:

式中,r为每个保护开关中的标准电阻。假设每个保护开关的等效电阻为开关所带的标准电阻r与每两个保护开关之间来回导线阻2Δr之和。
虽然U1是通过开关监测定位装置内的电压传感器测量出来的值,但是它的值是由外部保护开关电路的现在的阻值和电流决定的。
U1的表达式为:

式中,a为保护开关的电阻误差值。在这里考虑的是总电阻的正、负误差,也就是误差的最大范围。序号最后需要取整数。
由上述方法可知,当某个保护开关的状态发生了改变,可通过公式(7)计算出状态发生改变的保护开关的序号,也就定位了故障发生地。
4 仿真分析
通过公式(7)可知,能否准确地定位状态发生改变的保护开关的位置的准确度取决于设定串联电阻的误差值a和回路中电阻的个数n。
本文的仿真中所选取的参数有:r=100 Ω,Δr=0.576 Ω,n=1,2,3,…,70。标准电阻的误差a取值范围为1、3、5。下面通过不同误差值a,来观察计算结果和真实结果的误差情况,选择误差值最合适的标准电阻。不同的误差值计算结果和真实结果对比如下面的图3—图5所示。
图3—图5中k1线为负误差(所有的标准电阻阻值为r(1-0.01a))时,通过保护开关定位方法计算得出的结果。k2线为正误差(所有的标准电阻阻值为r(1+0.01a))时,通过保护开关定位方法计算得出的结果。在不同的真实故障发生处与误差值a的情况下,保护开关定位方法计算得出保护开关序号正、负误差绝对值越大,证明定位越不准确;越小则证明定位越准确。

式中,R1为外部保护开关电路总阻值的实际值,R1的表达式为:

式中:r1是每个保护开关中的电阻的实际值,r1=(1±0.01a)r。n为保护开关回路中实际串联电阻的个数,就是状态发生改变的保护开关的实际序号,也代表故障发生的地址。
通过公式(3)(4)(5)(6)可知状态发生改变的保护开关的序号K的最终计算公式为:

图3 a=l时的结果对比
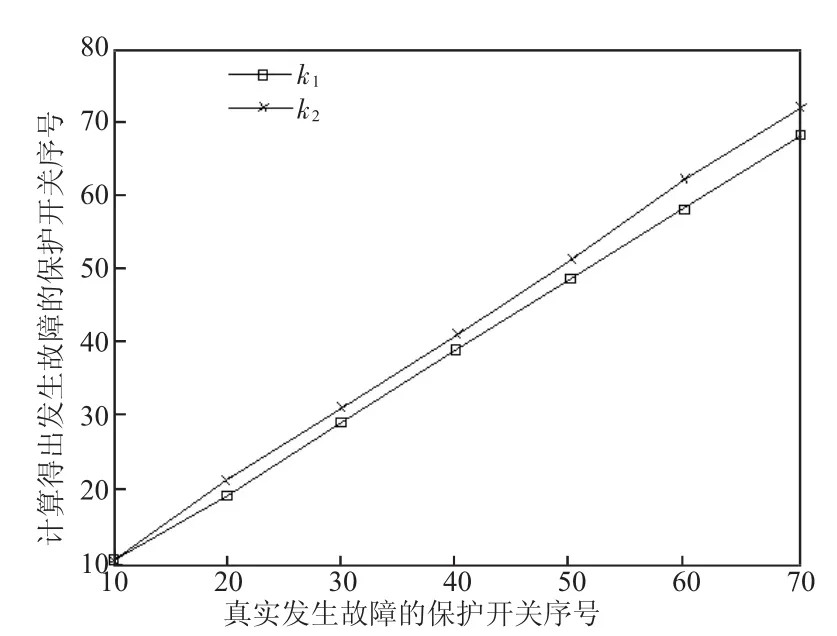
图4 a=3时的结果对比

图5 a=5时的结果对比
如上页图3所示,当标准电阻误差值a=l,发生故障处的保护开关序号为m=70。负误差情况下计算得出保护开关的序号为k1=69,正误差情况下计算得出保护开关的序号为k2=71。在这种情况下维修人员最多需要检测3个保护开关就能够找到故障发生的具体位置,故障范围缩小。由此可知,标准电阻误差值为1的情况下就可以满足工程的需求。
如图5所示,当标准电阻误差值a=5,发生故障处的保护开关序号为m=70。负误差情况下计算得出保护开关的序号为kl=66,正误差情况下计算得出保护开关的序号为k2=74。在这种情况下维修人员最多需要检测9个保护开关才能找到故障发生的具体位置,以每两个保护开关间距为60 m来计算,维修人员就要检查540 m的距离,造成大量的人力和时间的浪费。由此可知,标准电阻误差值在大于等于5的情况下是满足不了工程需求。
5 结论
1)在不同的真实故障发生处以及在误差值a的情况下,保护开关定位方法计算得出保护开关序号正、负误差的绝对值越大,证明定位越不准确;开关序号正、负误差绝对值越小则证明定位越准确。
2)标准电阻误差值为1的情况下就可以准确地定位故障发生地址。
