目标高频近场声散射信号空间特性分析
2019-01-12李锐安俊英成刚
李锐 安俊英 成刚
(中国科学院声学研究所北海研究站,青岛,266109)
目标声散射信号特征是主动声呐对水下人工目标探测与识别的重要依据。水下人工目标的声散射信号主要有两种,一种是声波在目标表面散射形成的几何声散射,另一种是由目标结构共振引起的弹性声散射。本文主要对高频近场目标的几何声散射信号空间特征进行分析。当入射波以不同角度照射目标时,目标各结构产生的声散射信号的时间域与空间域特征存在较大的差异。
国内学者从理论和实验上研究了充水圆柱薄壳、双层圆柱壳、加肋与周期加肋柱壳以及表面有覆盖层壳体等水下复杂目标的声散射特性。文献[1]对水下目标声散射信号的产生机理与信号特性开展了深入研究,并与试验验证结果有很好的一致性。文献[2-3]从理论上研究了模拟目标的声散射的时域与频域特征,对简单形状水下目标进行了声散射特性试验。文献[4-5]针对仿真与试验获得的目标声散射信号进行几何声散射信号与弹性声散射信号的分离。印度国家海洋技术研究所 A Malarkodi对不同材质目标模型的声散射信号特征进行了实验研究,对不同材质目标模型的敏感性和差异特征进行了研究[6]。
现有的目标声散射信号研究大多为基于声散射信号时域特性的目标结构特征研究,然而当目标相对接收水听器处于某些特殊姿态(例如正横方向)时,各散射结构的声散射信号出现混叠,便无法分辨目标不同结构的声散射信号回波。文献[7]通过对线列阵采集到的高频近场目标声散射信号的分析,得到了目标的三维近似模型,但目标的具体结构仍比较模糊。本文通过对线列阵采集到的目标声散射信号的分析,对目标结构进行解析,并利用高分辨波束形成算法获得不同结构声散射信号的空间特征,即入射方位角,以实现高频近场目标的检测与识别。本文采用MUSIC高分辨波束形成处理方法,与常规波束形成算法相比有着主瓣尖锐、旁瓣低矮的优点。
1 MUSIC波束形成算法
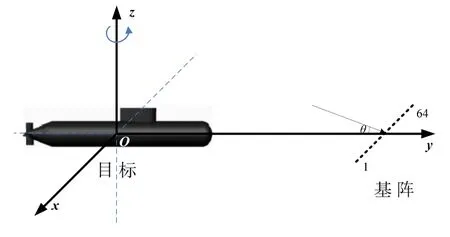
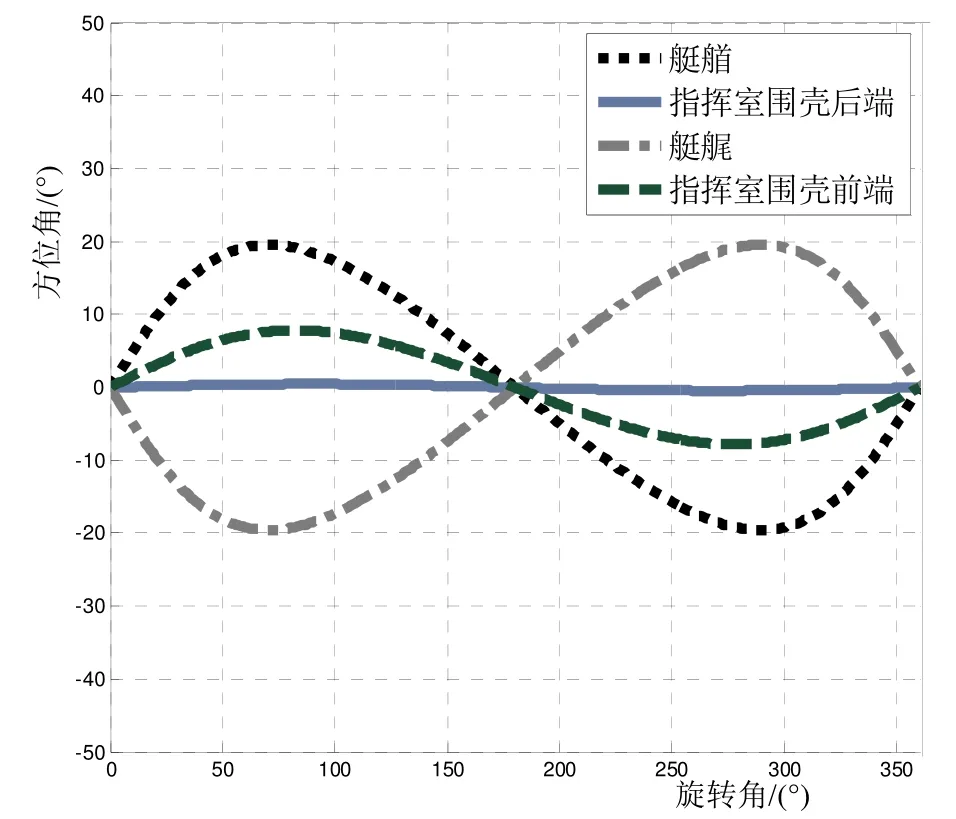
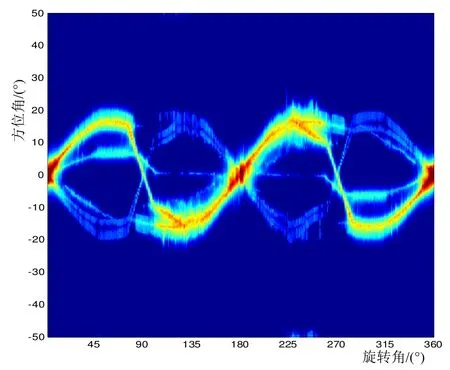
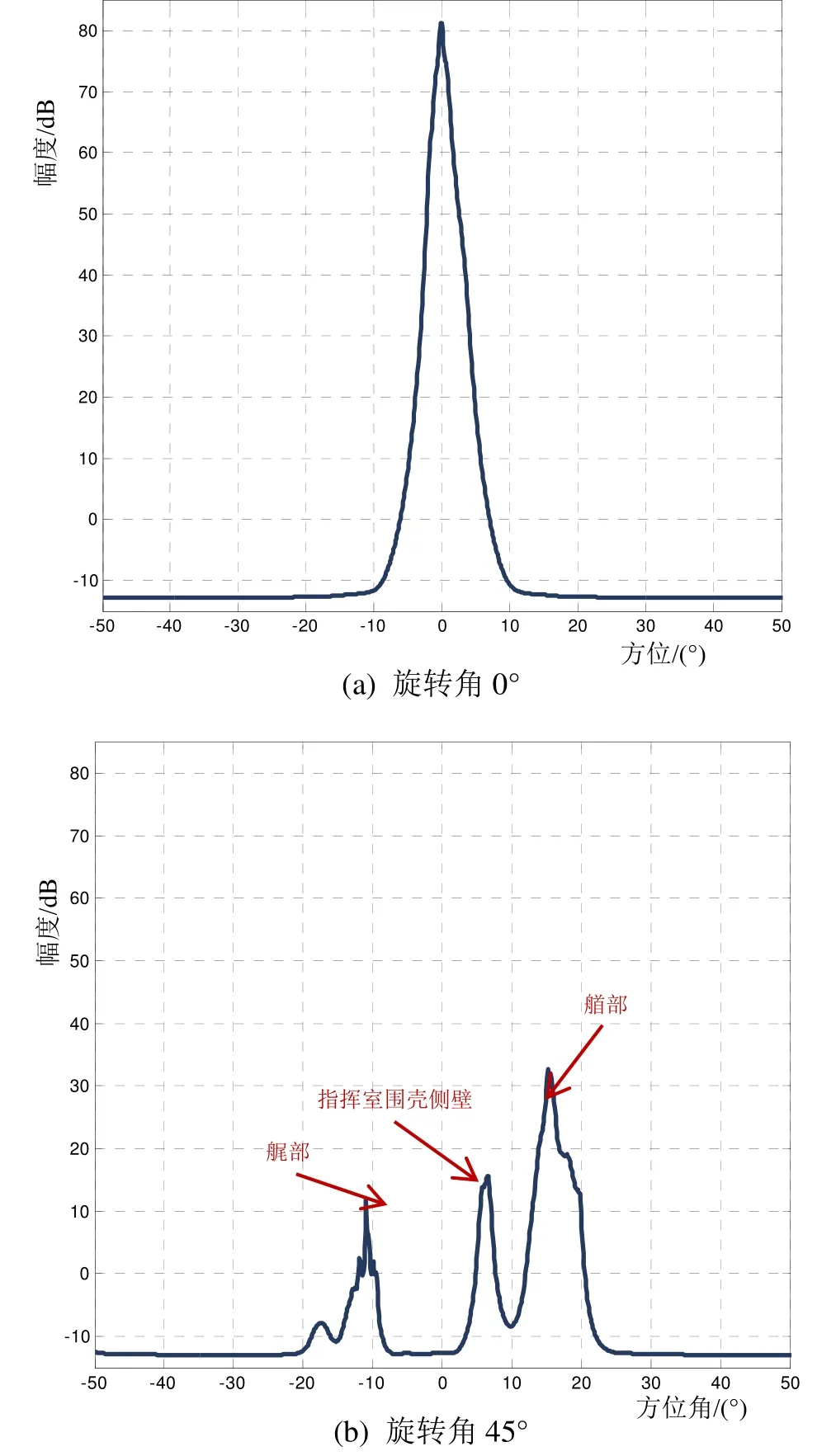
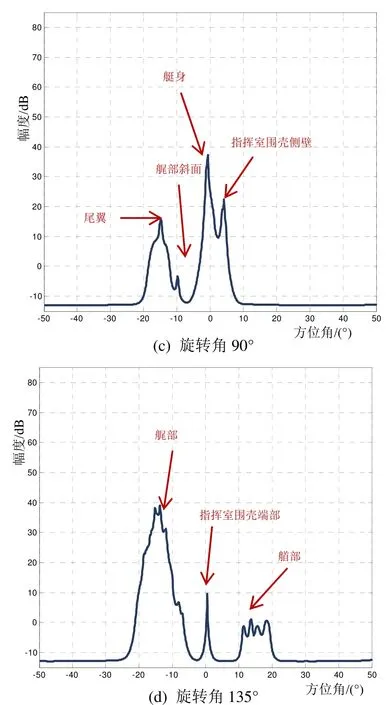
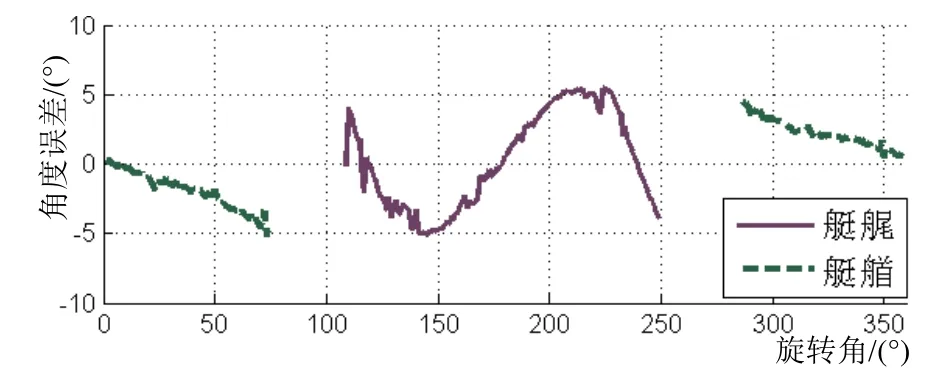
一个由M个阵元组成的已知几何形状基阵,假设有D(D 式中,Λ是降序排列的特征值构成的对角阵,E=[Es,En]是对应的特征向量,阵元域 MUSIC方位谱函数为: Benchmark模型长66.9 m,平均半径3.778 m,指挥室高度3.5 m。接收基阵为一条水平布放的阵元间距0.04 m的64元等间隔直线阵,阵中心与目标中心相距100 m。发射单频CW信号脉宽2.5 ms,中心频率30 kHz,采样频率200 kHz。以目标艏部正对基阵为起始0°旋转姿态,绕z轴逆时针旋转360°,基阵接收各个旋转角时目标的声散射信号,以图1中基阵法线顺时针方向为入射方位角的正方向。 图1 Benchmark模型几何配置示意图 由于目标在不同旋转角时的声散射反射部位不尽相同,图2为理论计算得到的目标艇艏、艇艉、指挥室围壳前端和后端相对基阵的方位角随旋转角变化的关系,在实际中产生亮点的目标结构是随着旋转角而改变的,该回波亮点轨迹将作为目标声散射信号的参考亮点轨迹。 图2 目标结构理论亮点轨迹 根据声散射信号相对于基阵的入射角度,结合高分辨MUSIC波束形成算法,得到空间域的目标声散射信号的亮点轨迹如图3所示,从图中可以看出目标各结构对声信号的散射情况。 图4给出了目标旋转角为0°、45°、90°和135°时声散射信号的单帧方位谱,在图中标示出了各波束对应的目标结构。 图3 空间域的目标声散射信号的亮点轨迹 图4 特殊旋转角目标结构亮点的方位谱 (1)艇艏回波亮点轨迹 初始时刻目标艏部正对基阵时,目标各结构的声散射信号入射角相对基阵均为垂直入射,艇艏声散射信号方位角为0°,且对回波亮点幅值起主要贡献。随着目标旋转角增大至 75°,艏部亮点轨迹与理论参考轨迹相符,目标各结构声散射信号的角度相对接收基阵逐渐分散,艏部声散射信号的入射角向正方向变化,最大入射角为16°。旋转角在75°~105°范围内,由于目标姿态变化及艇艏结构简单且形状圆滑,产生声散射信号的结构逐渐由艇艏变为艇身,逐渐到艉部变化,方位角由正方位经0°线性变化至负方位。继续旋转至180°,艇艏逐渐远离基阵,方位依然为正方向,但声散射亮点轨迹强度减弱。 (2)指挥室围壳亮点轨迹 仿真亮点轨迹在 0°~90°范围内与指挥室围壳前端参考轨迹相符,仿真亮点轨迹在90°~180°范围内与指挥室围壳后端参考轨迹相符。初始时刻指挥室围壳前端正对基阵,声散射亮点轨迹方位角为0°,随着目标旋转角增大至 90°,指挥室围壳声散射信号的入射角向正方向变化,最大入射角为6.5°。旋转角在 45°~90°范围内指挥室围壳侧壁参与声散射,其声散射信号亮点轨迹存在展宽。旋转角在90°~180°范围内,参与声散射贡献的结构由指挥室围壳前端变为后端,方位角在0°附近,且亮点轨迹变窄。 (3)尾翼亮点轨迹 初始时刻目标艏部正对基阵,尾翼声散射信号方位角为0°,由于艉部较艏部距接收基阵距离远,艉部声散射信号被艏部散射信号淹没,随着目标的旋转尾翼声散射信号亮点轨迹逐渐显现且向负方向变化,且在0°~ 75°内声散射信号强度较其他散射结构弱,亮点轨迹方位角随旋转角呈非线性变化。旋转至 75°后,产生声散射信号的结构逐渐由尾翼变为艇身,旋转至 90°时亮点轨迹方位角由负角度逐渐线性变化至0°,继续旋转艉部逐渐靠近接收基阵,声散射信号强度增强,目标尾呈现出两条亮点轨迹,分别来自艉部棱角部分和尾翼,继续旋转至180°,目标艉部正对基阵,目标各结构声散射信号方位角合并为0°,与参考轨迹相符。旋转角在180°~360°间的目标声散射信号方位历程与0°~180°声散射信号方位历程是对称的。 图5给出了艇艏与艇艉在有效旋转角区间内的方位估计误差,方位估计平均误差为2.8°,鉴于目标散射结构较为复杂,该误差值在容许范围之内。仍需继续对波束形成算法进行优化,降低目标结构方位估计误差。 图5 方位估计误差 方位估计容许最低信噪比,以该段信号首个回波段的信噪比值作为参考输入信噪比,在上述收发配置的情况下,目标旋转方位历程图中,设定可分辨出目标的完整几何形态的艏部亮点信噪比为5 dB,此时满足可分辨出目标几何形态的最低输入信噪比为–5 dB。方位估计误差随输入信噪比减小而降低,与高分辨波束形成性能有关,此外还与目标上分布的几何散射点的数量有关。 本文针对均匀间隔线列阵接收到的 Benchmark模型的声散射信号开展研究,从空间域信号方位角的差异入手对目标结构特征进行分析,利用MUSIC波束形成算法得到了目标各几何结构的回波亮点轨迹,产生散射亮点的几何结构依次为艏部、指挥室围壳、艇身、艉部棱角部分和尾翼,亮点轨迹与理论参考轨迹相符。目标处于除 0°、180°外的旋转角姿态时,目标各结构的声散射信号均具有较明显的方向性。据此,在实际应用中可对目标呈某一姿态时线列阵接收到的声散射信号和单基元接收到的时域声散射信号进行处理分析,得到目标几何结构的空域和时域信息,进而对目标几何结构进行解析。 下一步研究将结合目标声散射信号的空域和时域信息完成对目标几何结构的解析,利用计算机仿真和实验数据对算法加以验证。此外,需对波束形成算法进行优化,降低目标结构方位估计误差。




2 Benchmark模型声散射信号仿真
3 结论
