基于智能手机的工业机器人控制技术研究
2019-01-10郭刘飞徐志业王艳杰周凯莉孙硕硕
郭刘飞 徐志业 王艳杰 周凯莉 孙硕硕
【摘 要】随着智能机器的发展,人类的生活、生产水平都有了不同的提高。本设计是基于智能手机的智能视频载物平衡小车,解决现有智能循迹避障机器人无线传输的局限性问题,可以为地域探索和危险地带紧急抢险提供很大的资源,在第一时间为消防人员进一步做抢险方案提供数据,也可用于高辐射车间的物品运输。
【关键词】循迹;无线图像传输;手机wifi遥控
中图分类号: TP242.2文献标识码: A文章编号: 2095-2457(2019)36-0114-002
DOI:10.19694/j.cnki.issn2095-2457.2019.36.052
【Abstract】With the development of intelligent machine,human life and production level have been improved differently.This design is based on smart phone smart video vehicle balance car,to solve the limitations of wireless transmission of the existing intelligent tracking obstacle avoidance robot,can provide great resources for regional exploration and emergency rescue in dangerous areas,provide data for firefighters to make further emergency plans in the first time,and can also be used for the transportation of goods in high radiation workshop.
【Key words】Tracking;Wireless image transmission;Mobile wifi remote control
0 引言
随着社会的不断发展,科学技术水平的不断提高,人们希望研究出能代替人来从事一些危险行业和工作的机器人[1],或要求精度极高能够代替人来进行工业生产。机器人已历经三代技术创新变革:第一代智能循迹避障机器人不装载任何传感器,只是采用简单的开关控制;第二代智能循迹避障机器人装有简单的传感器,能适应一定的外部环境变化;第三代智能循迹避障机器人是智能的,以多种外部传感器構成感官系统。智能循迹避障机器人是移动机器人的一种,有较好的应用前景。本次设计的电动智能车可实现循迹、避障、WIFI智能视频[2]、载物台水平等功能,可应用于科学勘探、物品运输等。
1 系统设计原理
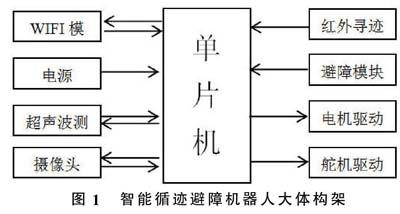
机器人寻迹系统采用红外反射式光电管识别路径上的黑线,并以最短的时间完成寻迹。通过加长转臂的舵机驱动前轮转向,使用符合pid算法的控制器[3]来实现直流电机的调速。利用机器视觉[4]采集图像,通过智能手机WIFI网络进行高清传图来控制机器人的前进、后退、左右转弯、高清摄像头实时拍摄;按照规定路线行进,实时监控路况;平衡载物台能在坡度30°的情况下依然保持水平。根据研究目的,智能循迹避障机器人大体构架如图1所示。
图1 智能循迹避障机器人大体构架
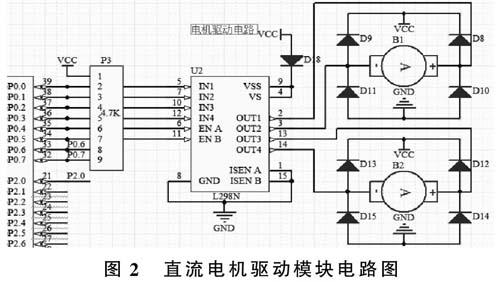
图2 直流电机驱动模块电路图
2 系统硬件设计
2.1 直流电机驱动模块
本直流电机驱动采用集成芯片L298和由分立元件构成的驱动电路模块来驱动,控制端连接单片机,由单片机控制输出PWM脉冲控制L298和分立元件驱动电路模块的输出和PWM脉冲输出的方向,从而控制直流电机的转速大小和正反转。如图2。
2.2 步进电机驱动模块
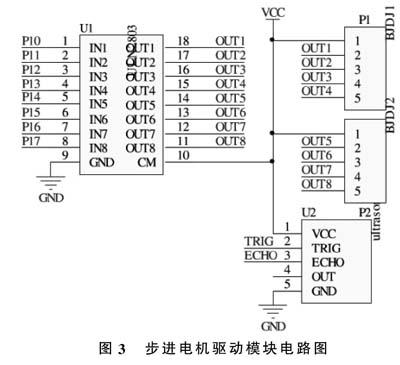
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。步进电机是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定,此模块是用来作为小车平衡载物台水平调节。如图3。
图3 步进电机驱动模块电路图
2.3 红外循迹模块
循迹传感器工作原理:TC端为高电平时,传感器休眠,为低电平时,传感器启动。Signal端遇到黑线时,输出高电平;当遇到白线,Signal输出低电平。利用红外线在不同颜色的表面特征,具有不同的反射性能。
2.4 超声波避障模块
超声波避障,就是利用超声波来检测机器人的前方是否有障碍物,机器人的前方放一个超声波发射器、一个超声波接收器,利用单片机输出一个40kHz的触发信号,把触发信号通过TRIG管脚输入到超声波测距模块,再由超声波测距模块的发射器向某一方向发射超声波,在发射时刻的同时单片机通过软件开始计时,超声波在空气中传播,途中碰到障碍物返回,超声波测距模块的接收器收到反射波后通过产生一个回应信号并通过 ECHO 脚反馈给单片机,此时单片机就立即停止计时。由于超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离,即:S=VT/2,通过单片机来算出距离。当距离障碍物达到一定距离时候,机器人自动停止前进并避开障碍物。
2.5 wifi无线收发模块
由手机终端,通过WIFI无线网络连接到路由器,再通过手机应用软件,向路由器发送控制命令及数据。路由器接收到数据后通过内部的串口发送软件,将接收到的命令和数据,通过路由器串口发送到单片机的串口端,单片机接收到这些命令后执行相应的指令,视频信号,通过摄像头采集之后通过路由器发至终端,并在其应用软件中显示摄像头采集到的视频信号。
2.6 图像采集处理模块
采用了普通高清30W像素的摄像头拍摄视频,摄像头自带有图像处理压缩的驱动程序,使图像转换为二进制数字信息,无线局域网可实现54Mbp/s的数据传输,不会有明显的滞后感。
2.7 电脑终端控制并显示视频模块
Mini无线路由器经过OPENWRT开源系统建立的wifi热点,电脑终端利用VB窗口设计程序,绘制出电脑上位机软件wifirobot.exe。利用网络工程知识,将电脑与小车单片机系统连接在同一个局域网环境下,通过发送脉冲数字信号,控制小车的行驶。
2.8 Andriod智能手机便捷控制模块
利用Andriod开发平台SDK,根据JAVA语言,创建了手机控制软件apk.文件,通过Andriod智能手机控制端,不仅可以运用触控按键来控制小车的行驶转向问题,而且可以利用现代最新重力感应技术来控制小车:当手机向前倾斜,小车前进,向后倾斜,后退,向侧倾斜,小车向对应的方向转向。
3 结束语
本文设计的基于智能手机的工业机器人控制系统,搭建硬件平台是该系统的基础,好的控制系统能够保证小车准确地执行避障指令。对智能手机进行编程,使得智能手机能够与小车控制系统协助,精确实现小车的行进、转向和自动避障等功能,使其在无人控制情况下安全自动化行驶,在复杂地形内准确定位危险源。
【参考文献】
[1]马栎.智能机器人现状及发展趋势研究[J].传播力研究,2018(35).
[2]傅梓劼.智能机器人控制技术特点及其在生活中的应用[J].电子技术与软件工程,2018(09):87.
[3]刘振辉.工业机器人在自动化控制中的应用研究[J].电子世界,2018(10).
[4]贾丙西,刘山,张凯祥,陈剑.机器人视觉伺服研究进展:视觉系统与控制策略[J].自动化学报,2015(05).
