一种基于Arduino平台的智能循迹避障小车的硬件设计
2018-05-30山西省运城市康杰中学王森龙
山西省运城市康杰中学 王森龙 王 哲
1 引言
智能循迹小车是一种按照预设引导路径行驶的智能小车,在工业领域中得到了广泛的应用,如仓储的智能搬运、无人搬运等[1,2]。它是一种自动化与智能化的设备,可以根据具体需求或者流程而灵活配置的,具有体积小、操控灵活简单等优点[3,4]。但是,在智能循迹小车行进过程中难免会遇到障碍物,设计一定的避障模块,从而使其具备障碍物检测能力,避免与障碍物发生碰撞造成货物或小车的损坏,已然成为了智能循迹小车必须具备的能力[5]。
为此,本文设计了一种基于Arduino平台的智能循迹避障小车的硬件系统。该系统利用红外线不同的反射能力的设计红外循迹识别模块,基于超声波测距避障的原理设计避障模块,从而使得智能循迹小车具备全方位避障能力,有效提升智能循迹小车的自主避障能力。
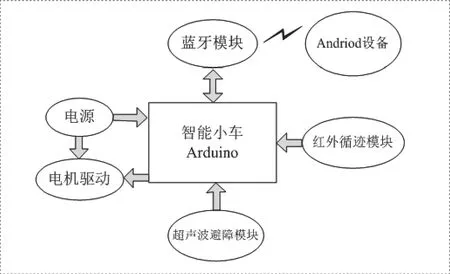
图1 硬件整体方案
2 整体方案设计
本文所设计研究的智能循迹避障小车的硬件系统主要由Arduino主控单元、电机驱动模块、红外循迹模块、超声波避障模块、以及Android手机端界面等构成。智能避障循迹小车硬件系统整体设计方案如图1所示。
2.1 红外循迹模块
本设计通过高发射功率红外光电二极管和高灵敏度光电晶体管组成的红外循迹模块识别行进路径上的预先设置的黑线,利用黑线对红外线不同的反射能力,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。将实时路径信息发送到Arduino主控单元,主控制器经过判断之后,通过I/O口控制电机控制模块驱动两个直流电机的工作状态,从而实现小车的循迹功能。光电传感器实现循迹的电路原理图如图2(a)所示。选用TCRT5000型光对管如图2(b)所示。

图2 红外循迹模块设计

图3 电机驱动电路图

图4 避障模块设计
2.2 电机控制模块
智能循迹小车采用直流电机作为执行器件,采用直流电机驱动芯片L298N作为电机驱动芯片,通过通过Arduino主控单元发出的PWM调制信号实现电机转速的控制,通过控制两个直流电机的转速来实现小车的转向。所设计的智能小车电机驱动模块如图3所示。
电机控制逻辑如表1所示。以电机A为例,当使能端EN A为高电平时,如果输入引脚IN1为低电平而输入引脚IN2为高电平,电机A反转;如果输入引脚IN1为高电平而输入引脚IN2为低电平,电机A正转。

表1 小车运动逻辑
2.3 避障模块
为了实现智能循迹小车的自动避障功能,本文选用HC-SR04超声波避障模块,在小车前端左右两侧各安装一个,扩大其避障的范围,以实现智能循迹小车对障碍物的全方位有效避障。HC-SR04超声波避障模块,具有传输距离范围宽、测距精度高等优点,广泛用于智能机器人的测距避障中。该模块包含超声控制电路、发射器以及接收器。HC-SR04超声波测距模块原理图和实物分别如图4(a)和(b)所示。
3 结束语
本文设计完成了一种基于Arduino平台的智能循迹避障小车硬件系统,采用红外循迹模块实现其循迹功能,为了避免循迹小车在行进过程中由于无法躲避障碍物造成的损失,采用超声波传感器测距使得循迹小车具备避障能力。测试结果表明,本文所设计的硬件系统能够满足小车循迹和避障的需求,且电路结构简单,容易实现,可靠性高。
[1]开思聪,陶重犇,孙云飞.基于STM32控制的仓储搬运机器人[J].计算机系统应用,2016,25(7):49-54.
[2]张军,赵玉刚,杨强,等.微型自动循迹搬运车控制系统的开发[J].组合机床与自动化加工技术,2017(7):133-136.
[3]张梅美,孙凤英.自动循迹搬运车控制系统设计[J].现代科学仪器,2013(1):111-114.
[4]缪璐婷.基于stm32的循迹避障智能车设计[J].电子世界,2017(7):140-140.
[5]郭燕.智能循迹小车在搬运过程中出现的若干问题及解决办法[J].工业控制计算机,2015(9):38-39.
