基于骨科手术机器人定位系统的精准微创内固定治疗股骨颈骨折
2019-01-09王军强张腾吴新宝
王军强 张腾 吴新宝
股骨颈骨折是骨科常见损伤,约占全部骨折的3.6%,好发于老年骨质疏松患者,多为低能量损伤,也可见于受到高能量损伤的青壮年人。
股骨颈骨折的手术治疗方式多样,其中空心拉力螺钉内固定由于其微创、损伤小、固定可靠等优势成为治疗年轻股骨颈骨折患者和老年无移位性股骨颈骨折患者的主要方式。目前常用的空心钉构型为“▽”型,应用时要求3枚空心钉平行分散,且尽可能贴近股骨颈骨皮质和股骨头软骨下骨,以获得良好的螺钉把持力,同时提供良好的生物力学稳定性。此外,为了提供更好的稳定性,还有学者研究4枚螺钉固定(3枚平行分散螺钉+1枚垂直骨折线螺钉)、双平面双支撑螺钉固定等构型[1-2]。
传统的空心钉徒手置入方法存在诸多缺点,如术者经验不足时可能无法根据骨折类型做好术前螺钉位置规划,钻孔时手持不稳难以控制导针方向,调整导针位置时反复钻孔可能造成骨质破坏,以及可能出现螺钉位置不良或穿出等,这些因素可能间接或直接造成骨折不愈合、股骨头坏死和内固定失效等术后并发症,影响患者的功能预后[3]。同时,术中为确定导针及螺钉位置需多次透视,增加了术者和患者的放射线暴露。
随着医学影像、计算机、机器人等技术的发展,机器人辅助骨科手术应运而生。应用骨科手术机器人可以提高手术操作的精准度和手术的治疗效果,并减少X线辐射对术者和患者的损伤[4],真正实现骨折的精准化治疗。
为了使骨科手术机器人在股骨颈骨折内固定术中的应用规范化,使骨科精准治疗技术惠及更多患者,现以“天玑”骨科手术机器人(TiRobot)为例阐述骨科手术机器人辅助下的股骨颈骨折空心钉内固定术的技术要点,以促进骨科手术机器人的临床应用。
一、骨科手术机器人简介
1.骨科手术机器人的结构:骨科手术机器人定位系统通常由手术计划和控制软件、主机、机械臂、光学跟踪系统、手术工具包和附件等多个部分组成。例如,TiRobot由主机、机械臂、手术计划与控制软件、光学跟踪系统、主控台车和导航定位工具包组成(图1)。

图1 TiRobot骨科手术机器人及其各部件名称
2.骨科手术机器人的工作原理:与传统外科手术一样,机器人辅助骨科手术也是机器人的“眼-脑-手”协调工作的过程。这一过程与骨科医生了解的常规传统手术过程既有相似也有不同之处。(1)骨科手术机器人的“眼”——图像获取和识别系统:作为骨科临床工作中最常用的诊断手段,骨科手术机器人的X线机和“C”型臂CT机可以在不暴露患者伤口的前提下为术者提供更多的患者信息。骨科手术机器人获取这些数字化的图像信息,可以指导术者更加准确地实施骨科微创手术治疗。术中 “C”型臂CT机获取的影像数据可以提供患者更完整精确的三维信息,从而可以更好地服务于高精度骨科手术,但是,由于辐射剂量相对较大、术中位置较难摆放等原因,不如术中X线应用广泛。因此,对多模态影像的兼容能力,很大程度上决定了骨科手术机器人在不同手术适应证中应用的广泛程度。为了更好地利用图像信息,实现空间定位,一些定位标记被置于骨科手术机器人的医学影像获取视野内,从而可以使影像更明确。骨科手术机器人可以通过软件识别算法,快速准确地识别并定位标记,为配准做准备。在传统手术中术者的视力会影响手术的精准度,同理,图像的质量在很大程度上影响机器人的配准精确程度。因此,在获取二维图像方面,高精度低畸变的数字平板“C”型臂X线机较影像增强式“C”型臂X线机更适合骨科手术机器人。(2)骨科手术机器人的“脑”——手术设计与配准系统:手术设计是骨科手术机器人的核心技术之一。精确的图像在获取后被上传给骨科手术机器人的主机,术者可以利用医学影像数据进行手术设计,并交由机器人完成空间位置配准。通过人机交互界面,术者可以依据需求在术前或术中实现手术设计方案。依据所获取图像的不同,手术设计方式分为二维手术设计和三维手术设计。一般来说,通过骨科手术定位机器人进行的螺钉通道规划为二维手术设计,即在多幅图像上定义螺钉的入点和止点。而通过关节手术机器人进行的手术设计则多为三维手术设计,可实现植入物关节面与骨面的良好贴合。配准算法是骨科手术机器人的另一核心技术,其本质是将术者在图像上做的手术设计方案完整精确地呈现至现实的手术空间。由于所使用的医学影像数据不同,机器人的配准方法也截然不同。在创伤骨科手术中常用的X线图像的配准方式为“C”型臂X线机标定方法,原理是机器人通过特定结构的标记点,计算“C”型臂X线机的发射源,标记点以及术者设计的螺钉入、止点之间的相对空间关系,并转换为可识别的运动学参数,指导机器人运动。对于CT或“C”型臂CT机的影像数据,则需要进行三维配准来获得机器人运动学参数。较为前沿的技术是采用X线影像与术前CT影像实现二维影像向三维影像配准,既可保留大量的三维空间信息,也可最大程度地减少术中透视时间。但是,此项技术尚不成熟,近期尚不能投入至临床应用中。(3)骨科手术机器人的“手”——工具追踪与导航系统:获得运动学参数后,机器人可以将手术工具(如钻头、铣刀等)精确地放置于相应的手术操作部位,这一过程称为机器人导航。在理论上,机器人可以获取自身位置信息,因此可以独立完成导航定位。但是,现阶段的骨科手术机器人的绝对定位精度难以满足临床手术的需求,需要另外的精确的外部设备对机器人导航进行精度补偿。光学捕捉系统是目前常见的精度补偿设备,通过实时光学跟踪指导机器人运动,实现精度补偿,可以将定位误差从1~2 mm减小至1 mm以下,同时也可以实现移位补偿、呼吸补偿等重要的功能。需要注意的是,光学捕捉系统对捕捉视野有一定的要求,合理的机器人摆位可以较大程度地避免因手术工具被遮挡导致的跟踪失败。
为保障手术的安全性,骨科手术机器人在导航过程中具备最高权限的机械式紧急制动功能,以保证在出现危险的情况下机器人能够立即停止工作,避免对患者造成伤害。另外,骨科手术机器人,尤其是骨科定位手术机器人,多为手术辅助设备,只为术者提供准确安全的螺钉通道,而不实施自主钻削操作。因此,骨科手术机器人在安全性和医生认同度方面均高于自动切削式机器人。术者可通过唯一的钻削通道进行自主可控的螺钉植入操作,完成高精准度高难度的骨科手术。
二、TiRobot辅助股骨颈骨折内固定术的适应证和禁忌证
1.适应证:TiRobot辅助股骨颈骨折内固定术适用于移位小或可闭合复位的股骨颈骨折。
2.禁忌证:(1)因硬件因素或患者因素造成所采集的图像不清晰,无法实施安全的手术规划。(2)无法使用空心钉技术完成有效固定的股骨颈骨折。(3)机器人规划的手术路径可能无法避开重要组织,如血管、神经等。(4)机械臂无法移动到规划部位,例如术中多名医生协同完成复位时对示踪器产生遮挡,或由于患者体位和手术床位置等因素使机械臂无法移动至规划部位。 (5)示踪器无法得到有效固定,如患者骨质疏松较严重,或因呼吸幅度较大而需要多名医生协同完成复位并维持复位等。 (6)通过术前规划确定导针与骨面成角过小,无法完成入点的固定,或产生无法避免的误差。
三、TiRobot辅助股骨颈骨折内固定术的操作规范与流程
1.术前准备:行椎管内麻醉后置患者于牵引床,将患肢沿身体长轴方向牵引,健侧下肢成角度打开。
2.复位骨折:采用透视下牵引闭合复位或有限切开复位等方法,尽可能使骨折处恢复正常解剖结构,并建立空心钉内固定的骨性通道。
3.准备机器人:常规消毒铺巾,同时摆放机器人各部件及“C”型臂X线机至适当位置,确保机械臂工作空间可达手术区域。将光学跟踪相机置于患者足端,移动式“C”型臂X线机置于术者对侧。
4.采集和配准图像:于患者患肢髂前上棘安装患者示踪器,同时组装并固定机器人示踪器和无菌保护套,建立术中机械臂无菌工作环境。应用“C”型臂X线机获取包含机器人定位标记点的术中透视影像,并将其传输至主机工作站用于配准运算。 (1)对创伤骨盆螺钉通道术中图像的要求:①完整清晰显示螺钉骨性通道。②尽可能使正、侧位平面透视图像相互垂直,以利于计算机构建三维空间关系。③定位标尺均于图像内且不能相互重叠。 (2)对计算机导航图像的要求:股骨颈骨折螺钉内固定术中摄股骨颈螺钉通道正位和侧位像。 (3)透视图像识别要点:①摄股骨颈螺钉通道正位像时,使患者取仰卧位,将透视影像增强器垂直于患者冠状面,完整显示股骨外侧骨皮质至股骨头全长。见图2、3。②摄股骨颈通道侧位像时,使患者取仰卧位,将透视影像增强器垂直于股骨颈螺钉通道平面,完整显示股骨外侧骨皮质至股骨头全长。见图4、5。
5.规划手术路径:根据术中采集的图像,基于典型标识点和骨性标志结构,在主控系统规划软件上进行螺钉路径规划。通过股骨颈置钉通道正位和侧位双平面像确认股骨颈螺钉通道的路径。进行手术设计时需考虑手术安全性及螺钉的最佳力学分布。通过股骨颈螺钉正位像确认螺钉在股骨颈上方皮质与股骨矩下的骨性边界以及螺钉与骨折线的关系;通过股骨颈螺钉侧位像确认股骨颈骨皮质内外边界以及螺钉与股骨颈前倾角的关系,最后根据尖顶距调整螺钉长度。见图6、7。
6.运行机械臂:通过规划软件中的机械臂姿态模拟模块模拟机械臂的运行姿态,确认机械臂位姿适合后续操作,由主控系统控制和监督机械臂沿规划路径运动到目标位置。在机械臂末端安装定位套筒。定位套筒的摆放原则包括:(1)使定位套筒始终在清洁区域运动,并预留足够的运行空间;(2)预留术者植入导针的操作空间;(3)保证定位套筒与患者视踪器可以被光学跟踪器实时追踪,以便实时监测操作精准度。
7.置入螺钉:在入钉点做2 cm小切口。钝性分离皮下组织,将套筒尖端抵至入钉点骨皮质。通过规划软件确认入

图2 股骨颈正位X线像 图3 股骨颈正位CT三维重建像 图4 股骨颈侧位X线像 图5 股骨颈侧位CT三维重建像
钉点和虚拟探针方向是否与规划相符,如软件显示其与规划路径有明显偏差,可以使机器人对手术路径进行微调。在定位套筒抵达骨面后通过透视对其正、侧位像进行验证,以确保预置入路径与规划路径相符。确认路径精准后,在透视监控下经过套筒向骨性通道内钻入导针。见图8、9。
8.通过透视验证置钉路径:通过透视确认导针位置准确后拧入空心螺钉,最后确认空心螺钉位置良好后撤出导针,冲洗切口后缝合。
四、TiRobot辅助股骨颈骨折内固定术的注意事项
1.对术者的要求:掌握股骨颈骨折切开复位手术技术,在机器人出现故障时不局限于机器人辅助,可以继续完成手术。具体要求有如下4个方面:(1)熟练掌握股骨颈骨折闭合复位内固定技术,可以较好地操作并完成手术规划。 (2)熟悉机器人工作的基本原理,可以正确操作并完成机器人的图像采集。 (3)术中密切关注示踪器的位置,尽可能减少任何因素对示踪器的干扰,以便减少误差。 (4)在置入导向器和导针时,尽可能减少局部创伤,同时避免各种因素如皮肤、筋膜和肌肉组织等对所规划螺钉置入方向的影响。
2.图像采集过程中的注意事项: (1)图像包含术区全部骨性结构及解剖要素,骨性通道连续且完整。 (2)机器人定位及配准组件清晰呈现于透视图像中。 (3)导航相机同时识别并捕捉患者示踪器及机器人示踪器的空间位置信息。 (4)按照术式所需的图像组合依次采集,明确规划位图像及验证位图像的对应关系。
3.防止发生图像漂移:螺钉置入的准确性依赖于图像与手术部位空间位置的相对固定。术中过度牵拉导致手术部位空间位置变化,患者示踪器与手术部位发生相对位移以及示踪器与红外线光学跟踪器之间传输路径被干扰等因素均可造成图像与手术部位不符,这种情况称为图像漂移。术者在术中应具备判断图像是否发生漂移的能力并进行验证,如发生不可纠正的图像漂移则须重新采集图像。
4.复核手术路径: (1)在使用骨科手术机器人定位系统辅助完成手术的过程中,操作者应该始终监控系统的运行。当机器人出现非预期的运动、设备故障等情况时,应立即停止设备的运行,将所有与患者接触的部件移除后进行相应处理。 (2)使用“C”型臂X线机对植入物置入过程进行监视,经透视确认螺钉置入无误后结束手术。
5.对手术间的要求: (1)手术室面积>30 m2,具有良好的供电及安全条件。 (2)配套使用的手术台应满足患者体位和图像采集的要求。
6.骨科手术机器人的维护: (1)严格按照使用说明书操作,禁止未经培训人员使用手术设备。 (2)手术机器人系统包含精密部件,其运输和储存应严格遵照使用说明书。 (3)按照使用说明书对手术机器人进行定期维护和校准。 (4)使用过程中保证供电电压稳定,并对手术间定期进行用电安全检查。 (5)当进行熏蒸消毒时,将机器人推出熏蒸房间,以免机器人的电路板及元件受到腐蚀或损坏。 (6)对机器人防尘并经常进行擦拭除尘。(7)当手术机器人长期闲置不用时应除湿防潮。特别是在潮湿地区,应每周至少除湿1次,每次2~3 h。

图6 螺钉通道的正位规划 图7 螺钉通道的侧位规划
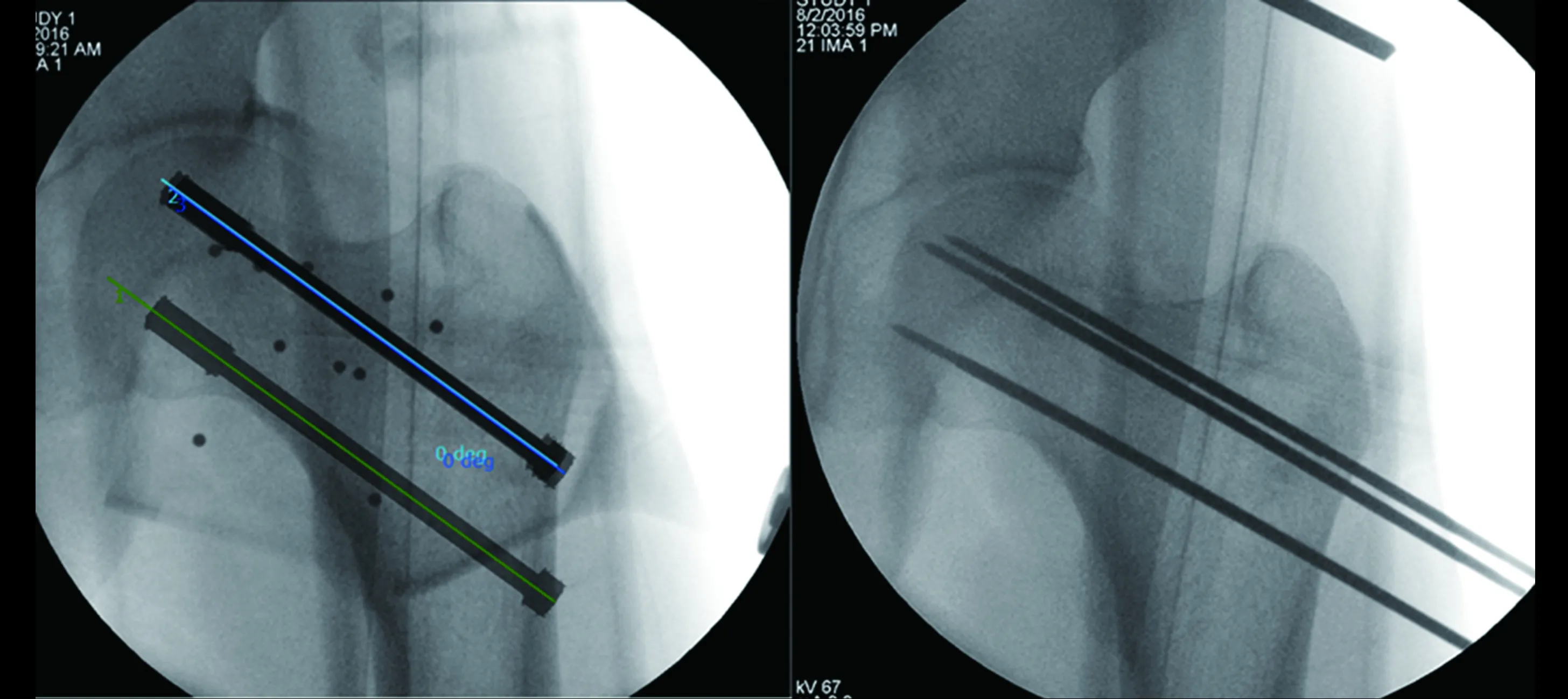
图8 通过正位像验证定位套筒和导针的位置和方向
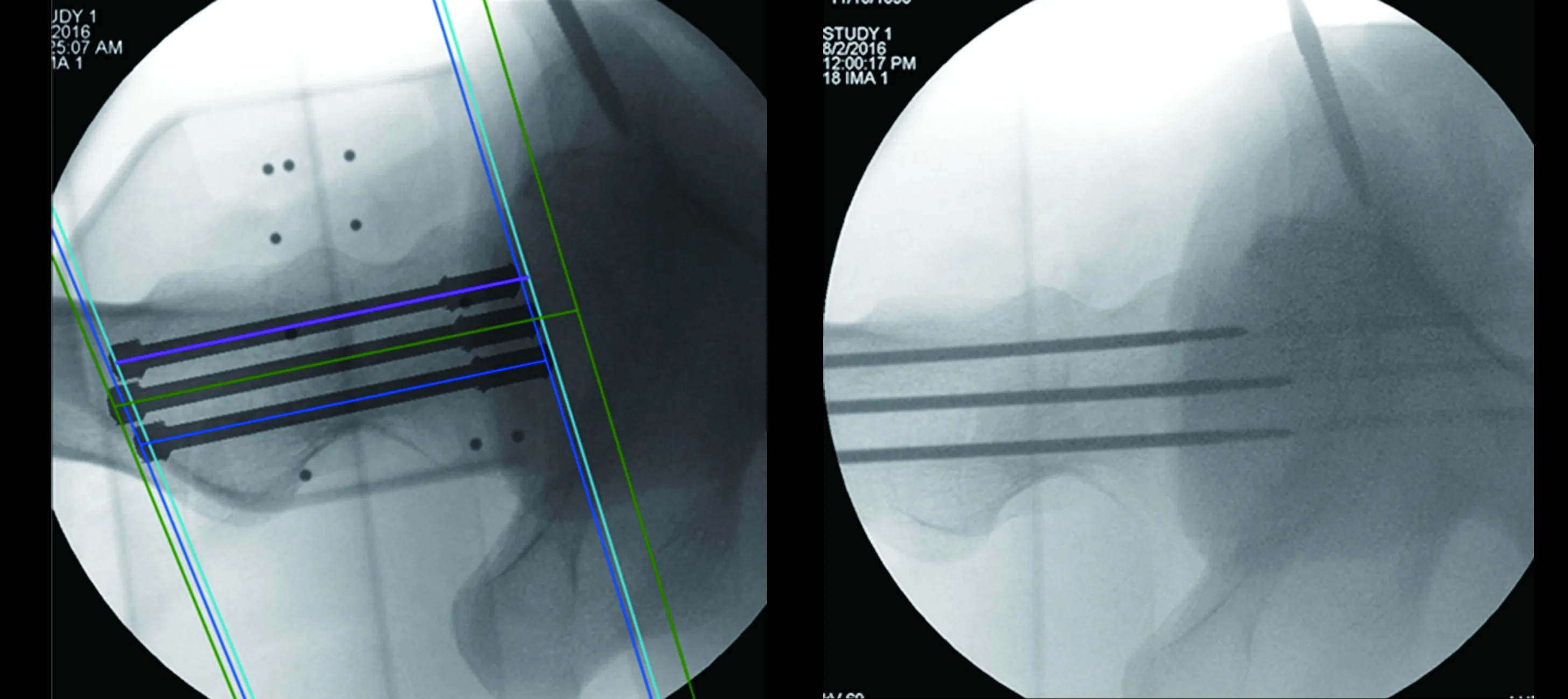
图9 通过侧位像验证定位套筒和导针的位置和方向
