一种结合空间邻域关系特征的面向对象遥感影像变化检测方法
2019-01-05吕文清
刘 波,燕 琴,马 磊,吕文清
(1.兰州交通大学 测绘与地理信息学院,甘肃 兰州 730070; 2.中国测绘科学研究院,北京 100830; 3.甘肃省地理国情监测工程实验室,甘肃 兰州 730070)
遥感影像变化检测技术已经成为遥感技术最新研究的热点。该技术从不同时期的遥感数据中定量地分析和确定地表变化的特征与过程[1]。一般包括:不同时间段影像配准、辐射校正等预处理;差异影像构建;变化区域判断等[2]。
以往的遥感影像变化检测多采用目视解译以及分类后比较法[3]。分类后比较法能够直接获取变化地物类型,但其工作量巨大,对分类结果精度要求严格。为此,一些学者提出了直接变化监测算法,该类算法效率高,随着技术进步,其检测精度也逐渐提升[4-7]。近年来,随着卫星传感器空间分辨率的不断提高,面向对象技术的遥感影像信息变化检测技术也逐渐成熟。相对于传统遥感影像变化检测方法,面向对象变化检测能够较好地避免“椒盐现象”的产生,提升变化检测精度[2,8]。
传统的面向对象变化检测算法极少考虑对象邻域之间的相关性。随着对象发生变化,与其相邻对象的空间关系特征也将发生变化。随着基于多尺度面向对象分割变化检测算法的提出,对象与对象之间的空间关系特征逐步得到体现[9]。但已有的算法中对象之间的空间关系特征更多地只在同一时期中各自体现[9-11]。本文在影像多尺度分割的基础上,提出一种基于对象与其相邻对象之间空间关系的量化方法。本方法将单个对象从图像分离出来,然后计算它与多个时相影像上的相邻对象的空间关系特征,最后将该特征提取出来,结合对象光谱特征,通过变化矢量分析(CVA)方法,提取两个时期遥感影像变化信息。
1 结合空间邻域特征的变化检测
1.1 变化检测流程
本文的实验流程如图1所示。

图1 结合邻域特征的变化检测流程
1.2 变化矢量分析(CVA)
变化矢量分析是一种特征向量空间变化检测算法[12]。其基本原理为多光谱图像的像素光谱信息或分割后影像图斑的多种特征可以用一个灰度矢量来表示,对于不同时间的遥感影像,每个像元或每个图斑的光谱或特征信息都可以生成一个具有一定方向和强度的矢量。假设T1时刻的灰度矢量为X,T2时刻的灰度矢量为Y,变化矢量为ΔC。X与Y分别为:
其中,n为波段数或特征层数,变化矢量定义为:
(1)
变化强度信息为:
|ΔC|=
(2)
其中,|ΔC|包含了从基准时期到检测时期各个波段变化信息总和,表示了两期影像的灰度差异。在一般情况下,当|ΔC|较大时,表示两幅影像之间的差异较大,变化的可能性也越大,反之则较小。因此可以通过选取合理的阈值来提取变化信息。变化矢量分析可以看作是差分法的深化和拓展,在理论上可以处理多光谱数据,而且能够提供变化类型[13]。
1.3 基于对象的变化矢量分析
基于对象变化检测的前提是影像分割,目前较为成熟并应用广泛的分割算法有分形网络进化算法(FNEA)、基于边缘检测算子的分割算法、基于概率密度函数梯度计算的均值漂移(Mean-Shift)算法、基于形态学以及基于分水岭变换的图像分割算法等[14]。本次研究主要采用FNEA的多尺度分割算法。
面向对象的遥感影像变化检测过程中,对于图像分割可以采取不同的模式。不同分割模式对变化检测结果有明显的影响,其中主要分割策略包括3种,多时相组合分割、单时相分割与多时相分别分割[15]。文献[16]指出多时相组合分割策略相对其他两种分割策略效果较好,所以本次研究主要在组合分割基础上进行。图2所示即为组合分割策略示意图。
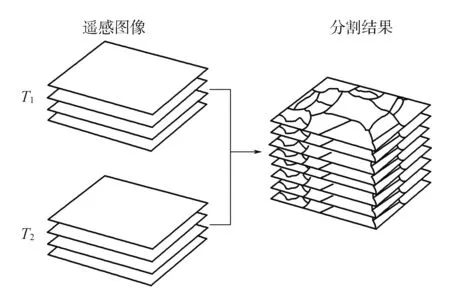
图2 多时相组合分割示意
基于对象的变化检测首先为影像分割,分割后得到像斑(影像对象)。实验通过对两个时相原始影像叠加分割,获取影像对象,同时搜索各个对象的相邻对象并标记,如图3所示。实验将具有公共边或者公共角点的对象看作相邻对象。

图3 影像对象及其相邻对象
1.4 对象空间邻域特征计算
叠加分割后,产生的影像对象具有多种特征,包括影像光谱特征,纹理特征,空间结构特征等。对于对象之间的关系特征,T1时相与T2时相影像对象与其周围相邻对象的光谱差异特征(R),具体可表示如下:
(3)
其中i为影像第i个对象(对于T2时向,i表示为i′)。n为与第i个对象相邻的对象个数,k为与第i个对象相邻对象编号,rik为第i个对象与相邻对象之间关系参数。
本文依据如果对象发生变化,其与周边对象关系也将发生变化的思想而提出,针对T1时刻影像,rik为T1时刻对象与T1时刻相邻对象的关系参数;针对T2时刻,rik为T2时刻对象与T2或者T1时刻相邻对象的特征关系参数,如图4所示。当使用T1时刻对象时本文假设对象的邻域未改变,如图4(a)所示。
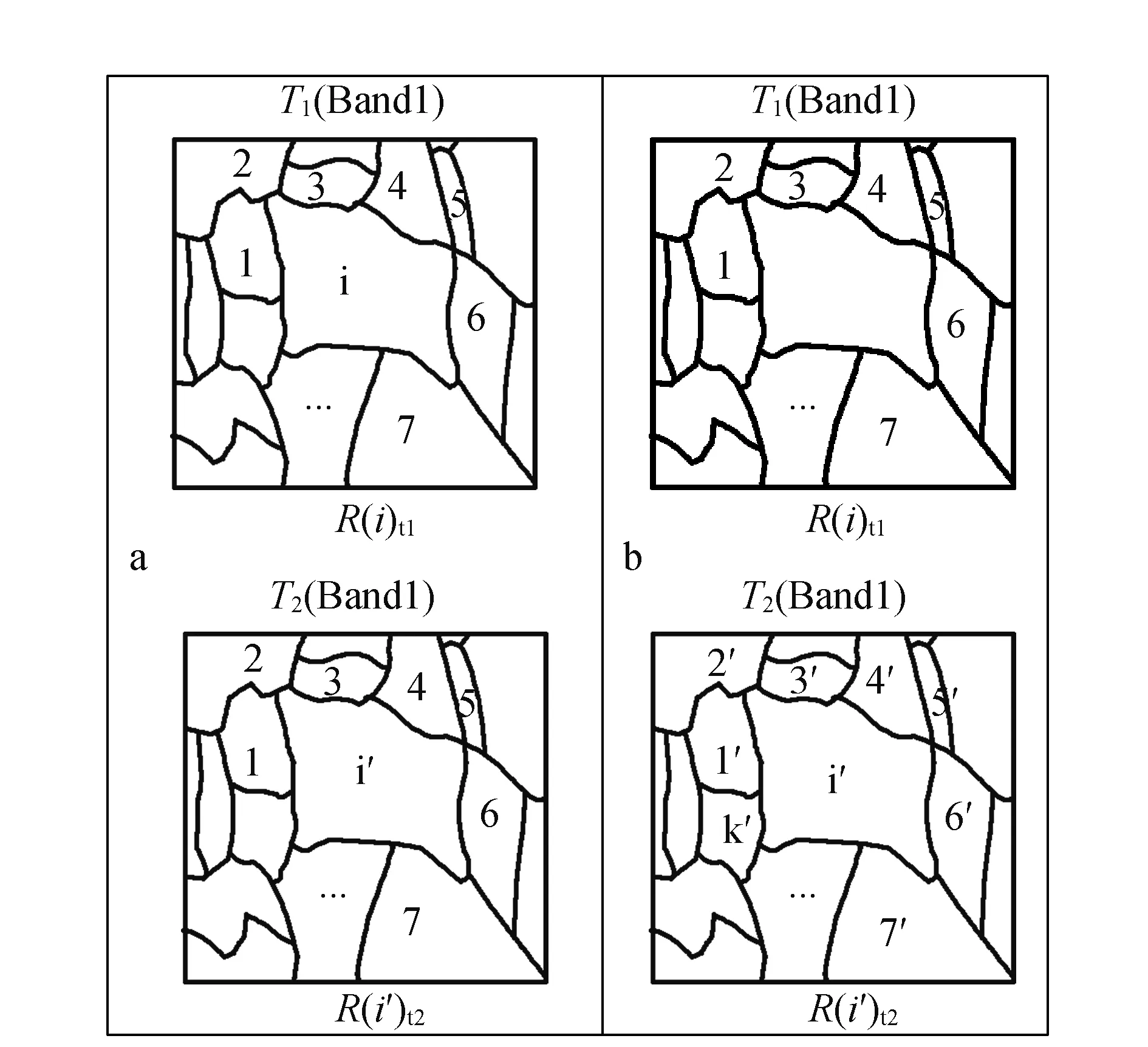
a.T2时相的目标对象相邻对象为T1时刻的对象;b.T2时相的目标对象相邻对象为T2时刻对象图4 T2时向目标对象两种相邻关系特征量化图示
为简化操作,本实验将R简化为各邻域对象平均像元亮度值之和与邻域个数的商与目标对象平均像元亮度值的差值,具体算式如下:
(4)
其中t为时相,Mean(i)t为对象I在t时相上的像素平均亮度值,Mean(k)t为目标对象相邻对象中的第k个对象在t时相与目标的空间关系特征。n为邻域像斑个数。
故本文在实验中将目标对象各个波段内像素亮度均值与目标对象和其相邻对象的关系特征(R)分别归一化后作为两个特征共同构建变化矢量。各次实验以及其特征选择方案详细信息见表1,本文后面各种实验方案将采用对象特征简写形式。

表1 特征选择以及特征量算
2 实验
2.1 图像预处理
本次研究选取2002年与2004年两个时期Quikbird遥感影像数据进行试验,如图5所示。首先分别对两个时期全色和多光谱影像进行融合,然后对两景辐射定标后影像进行几何配准,配准误差在一个像元以内,最后对几何配准后的两个时期影像进行相对辐射定标。

图5 研究区影像假彩色合成影像
实验融合方法采用NNDiffusPanSharpening算法,融合结果对于光谱、色彩和纹理信息均能得到很好地保留[17]。在ECognition软件平台下,对叠加的两时相影像进行多尺度分割。关于最优分割尺度的问题始终存在着不同的意见,遥感影像最优分割尺度也是一个广泛讨论的问题[14]。最终确定分割尺度为60,紧致度因子为 0.1,形状因子为 0.5。
2.2 变化检测结果与分析
本文所有策略方法都是通过构建变化矢量ΔC,通过计算ΔC的模,设置模的阈值,求取变化信息。本文实验仅仅利用目标对象的光谱特征参数以及对象与相邻对象之间光谱参数差异特征,针对特征差异影像,合理进行阈值选择。本文通过使用EM(最大期望)算法自动获取分割阈值,将变化矢量图像像素值归一化到0到255之间,最终得到基于光谱均值特征(Mean)的方法阈值为50.86,基于Mean+Rt1(t2)方法的阈值为68.5,基于Mean+Rt1(t1)的阈值为66.05。最终变化检测结果如图6所示。
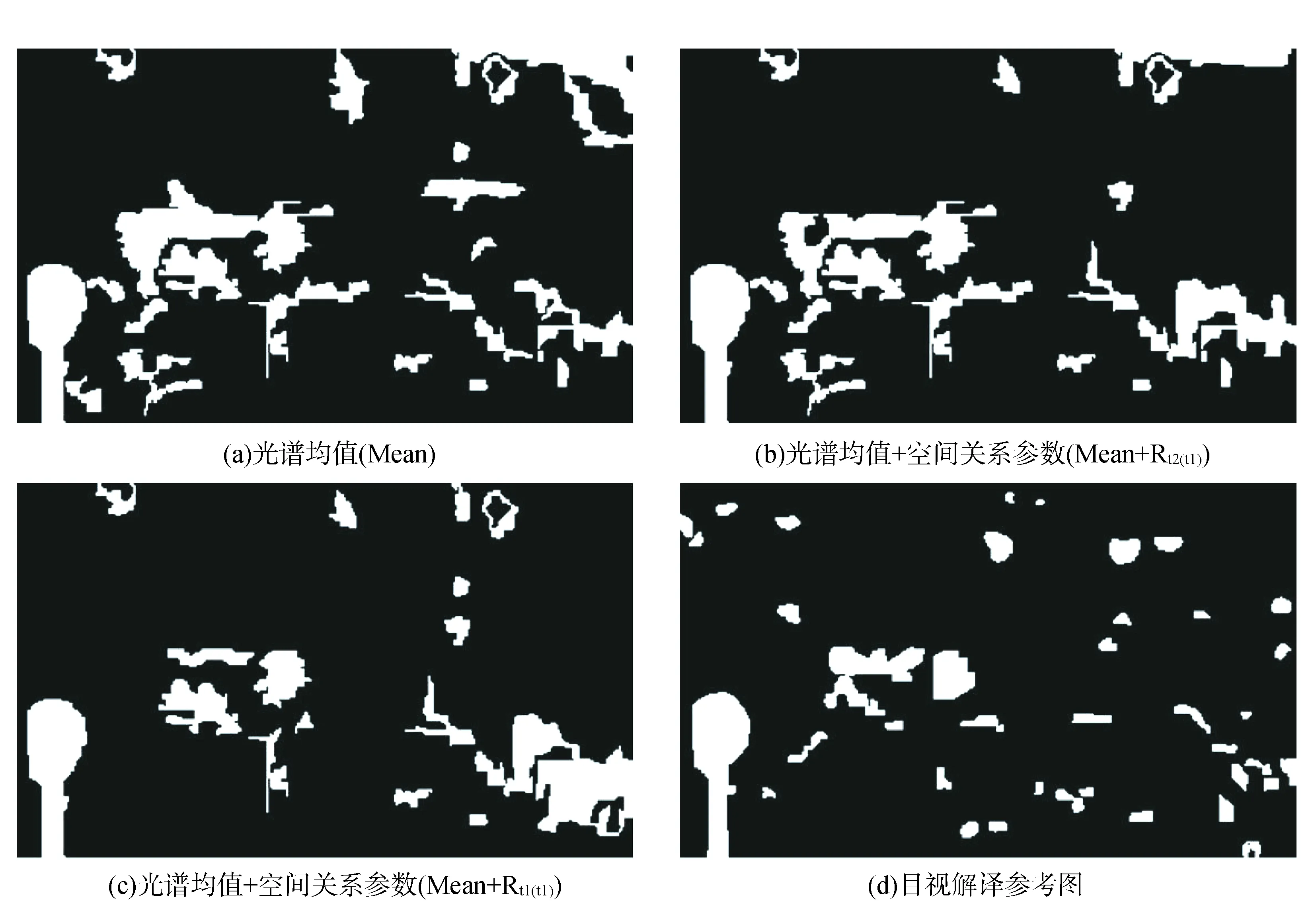
图6 变化检测结果图(图中白色区域为变化区域)
利用目视解译结果对各方法结果进行精度评价和对比,具体评价结果如表2所示。可以发现采用空间邻域关系特征的评价结果总精度比未采用该特征的方法精度高,同时其虚检率也相对较低。其中采用“光谱均值+空间关系参数(Mean+Rt1(t1))”特征的方法总精度最高,虚检率最低。同时3种方法漏检率都较低且相差不大。
3 结 论
通过增加影像对象的邻域特征来增加基于对象的变化检测特征参数,发现添加空间邻域特征的检测方法比不添加空间邻域特征的检测算法结果好。通过两种不同的空间邻域特征添加方式,发现T1、T2时相影像对象都采用基于T1时相的邻域对象能够取得更高精度,即“光谱均值+空间关系参数(Mean+Rt1(t1))”方法精度更高,总精度达到了90.31%。
此外实验中还发现,基于空间邻域特征的参数构造与在变化矢量检测中的使用策略方法还可以进一步挖掘,比如如何构造影像对象在两个时期内的全局空间关系特征等。
