高超声速边界层转捩的油膜干涉测量技术研究
2019-01-03董昊刘是成耿玺程克明
董昊, 刘是成, 耿玺, 程克明
(南京航空航天大学 航空宇航学院, 江苏 南京 210016)
边界层转捩一直是流体力学研究中的热点问题,也是人们长期关注但尚未解决的研究领域之一。对高超声速飞行器来说,边界层转捩直接关系到表面摩擦阻力的大小,摩擦阻力对表面热流及飞行器的热防护系统有重要影响。因此,高超声速边界层转捩的预测方法显得十分重要。到目前为止,已经发展改进了各种高超声速的转捩预测方法,数值模拟方面包括直接数值模拟[1]和大涡模拟[2]等。而这些方法受到计算机条件和算法的制约,难以广泛应用于飞行器的工程设计中[3]。风洞实验是研究高超声速边界层转捩的重要手段,但是受到了实验方法的制约。传统的纹影难以测量到三维的精确结果,新兴的粒子图像测速(PIV)[4]、平面激光诱导荧光(PLIF)[5]、基于纳米技术的平面激光散射(NPLS)[6]方法虽然测量精度更高,但均存在校准方法和实验方法复杂等问题。
油膜干涉法是一种适用于高超声速边界层转捩区域测量的实验方法。该方法具有测量面积大、测量精度高和实验成本低的特点。目前该方法在低速、亚声速及超声速风洞实验中已经有了较多的应用,并且取得很好的效果[7-9]。但是,在高超声速中的发展却十分缓慢。国内刘志勇、代成果等[10-11]将油膜干涉法用于高超声速平板的摩阻因数测量中,取得了一定的效果,实验中选用了黏度较大的硅油,导致吹风时间较长,实验模型表面温度变化较大,硅油黏性随温度发生变化,会导致计算的摩阻因数结果产生一定的误差。因此,将现有的油膜干涉测量技术运用到高超声速风洞实验摩阻因数精确测量,尤其是边界层转捩区域位置的判断中还存在着一些问题,需要对其进行进一步改进,保证既能够提高摩阻因数测量精度,又能快速准确地预测高超声速边界层转捩的位置,为高超声速飞行器设计提供技术支撑。
本文在南京航空航天大学高超声速风洞(NHW)中进行了油膜干涉法测量摩擦阻力因数的实验研究,并且首次将其应用于三维粗糙元诱导高超声速平板转捩的研究中。首先对硅油黏度特性随温度的变化进行了标定,并利用低黏度的硅油代替先前研究中使用的高黏度硅油,大幅度减少了实验时间,解决了模型表面温度变化较大对测量结果精确度的影响。结果表明油膜干涉法可以很好地应用于高超声速边界层转捩区域测量的研究中。
1 实验设备和方法
1.1 风洞及测量设备
实验是在南京航空航天大学高超声速风洞(NHW)中进行的,NHW是一座喷管出口直径Φ500 mm的高压下吹、真空抽吸暂冲式高超声速风洞,其风洞示意图和照片见图1。该风洞主要包括:气源系统及高压阀门、金属板蓄热式加热器、热阀、稳定段和喷管、试验段、扩压器、真空系统、电气控制系统和数据采集处理系统、电动攻角支撑机构、Φ300 mm彩色纹影系统和计算机视频数字摄录采集系统等。NHW具有5副轴对称超声速型面喷管,实验名义马赫数4,5,6,7,8,真空球容积为650 m3,每车次实验时间7~10 s。试验段及真空驻室上方有一个350 mm×350 mm的观察窗,通过观察窗可以使用CCD相机或高速摄影对模型和流场进行相关光学测量。

图1 NHW风洞示意图及照片
本实验主要用到的其他装置及测量设备包括单色光源,高速相机以及高纯度硅油。其中,单色光源采用单色LED钠灯,其频率为50 Hz,波长为589 nm。相机采用PCO公司所生产的S4高速相机,本次实验采用的相机帧率为100帧/s,远低于其极限拍摄速率(1 000帧/s),图2为NHW风洞驻室上方安装的PCO-S4相机。硅油则依据实验条件选用阿拉丁公司所生产的黏度为50 cSt的高纯度分析级硅油。

图2 实验用PCO-S4高速相机
1.2 实验模型
根据光学原理可知,如果试验所用光为单色钠灯发出的黄光,那么模型表面折射率为2.0时产生干涉条纹的效果最佳[11]。对多种表面材料干涉效果的研究结果如表1所示。
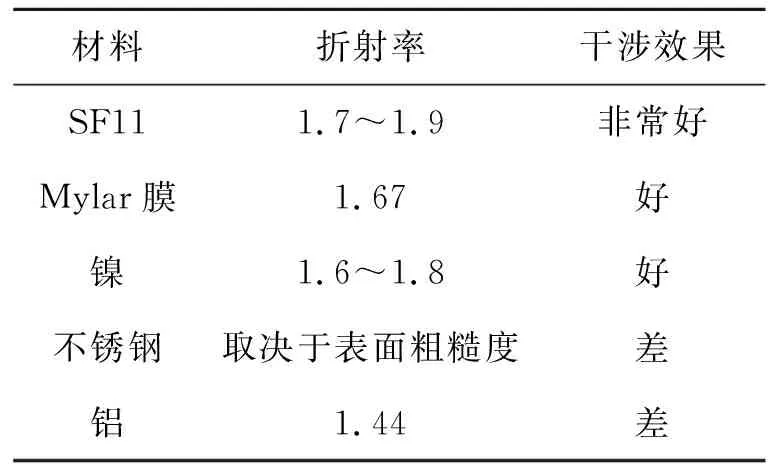
表1 模型表面干涉效果比较
以上材料都有各自的优缺点,SF11玻璃折射率最高,但是不易于制作试验模型;Mylar膜干涉效果好,但容易受到温度的影响,不适用于高超声速风洞的高温环境;镀镍的效果好,但是有污染不环保;不锈钢和铝的干涉效果较差,一般不建议采用。本实验采用在抛光后的不锈钢模型表面喷涂黑色高温反光漆,实验结果表明,黑色高温反光漆可以产生清晰的干涉条纹,获得准确的结果,且工艺较为简单,可作为高超声速油膜干涉法测量的模型表面处理方法。
由于硅油黏度和温度相关,需对模型表面温度进行实时测量。测温方式采用在模型表面布置多个热电偶来获取模型表面的温度。热电偶是一种常用的温度检测元件,具有测量精度高、测量范围广、构造简单、使用方便等特点,易于布置在模型的任何位置。本实验选用廉金属热电偶中适合本实验测量温度范围以及精度等级较高的T型热电偶,其精度为±0.5℃。
试验模型为平板模型,模型尺寸为长190 mm,宽150 mm,平板前缘为尖楔形,倒角为20°。三维粗糙元为方形粗糙元,距离模型前缘50 mm,中心位于平板模型沿流向的对称面上,粗糙元边长为3 mm,高度为1.3 mm。将测温用的T型热电偶布置在测温孔内,测温端与平板上表面齐平并保持光滑,测温孔直径为1 mm。带三维方形粗糙元的模型与测温孔分布示意图以及模型在风洞中的安装如图3所示。
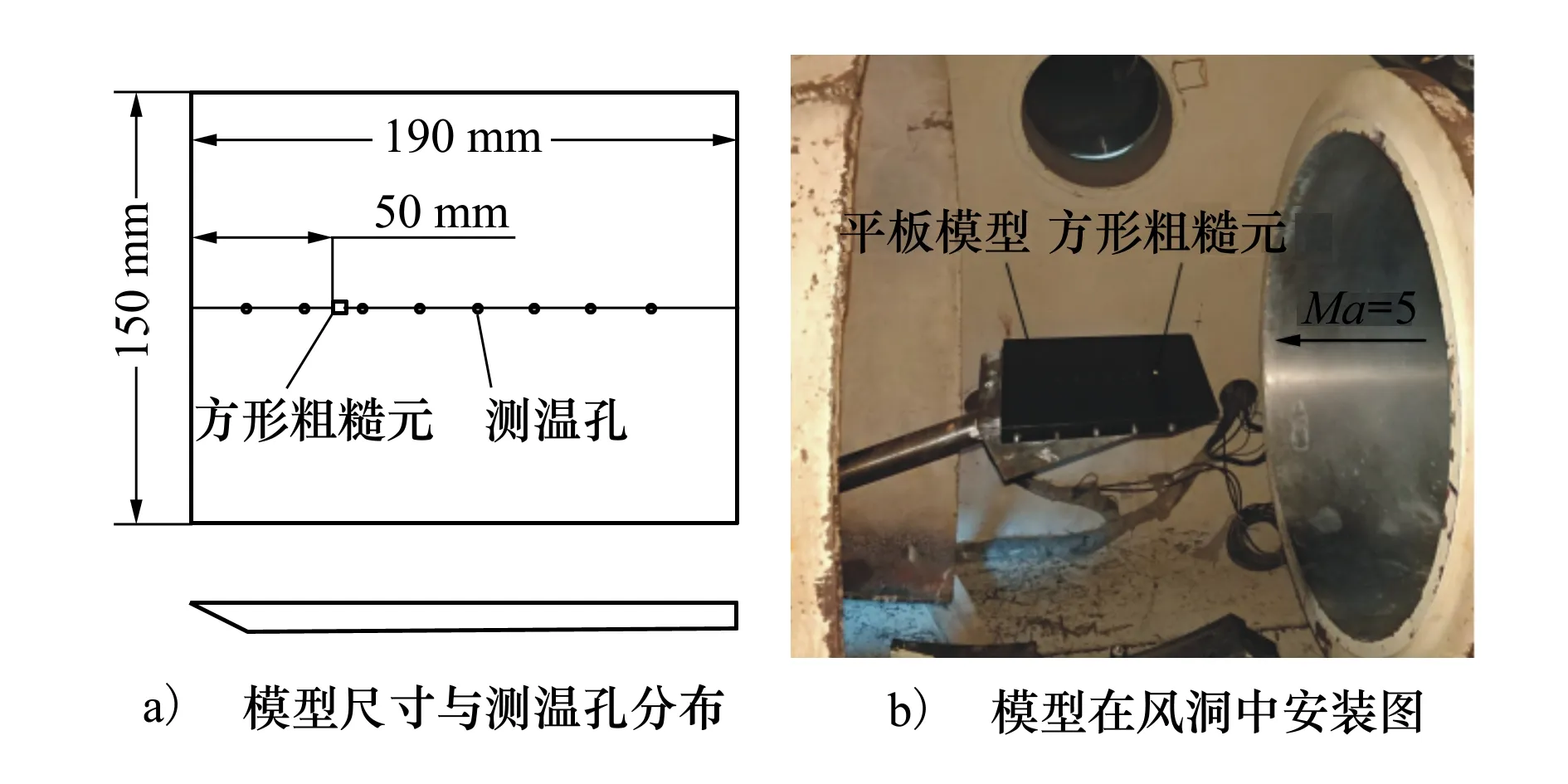
图3 带三维方形粗糙元的模型与测温孔分布示意图及模型在风洞中安装图
1.3 硅油黏度标定
前期研究表明,模型表面温度变化带来的油膜黏性因数的误差是油膜干涉法误差的主要来源[12]。在低速和亚跨声速风洞中,模型表面温度接近常温且变化范围较小,此时温度变化带来的硅油黏性的变化不是很明显,可按照常温时硅油的黏度来处理。但常规高超声速风洞需要对来流进行加热以避免气流过度膨胀产生的冷凝现象,因此来流的总温会很高。本次风洞实验前首先对使用硅油进行了不同温度下的黏度标定,采用高精度旋转黏度计对硅油黏度进行了不同温度下的测量。通过加热改变硅油的温度,获得不同温度下相应的黏度值,图4是对实验选用的黏度为50 cSt阿拉丁分析级硅油的标定结果。
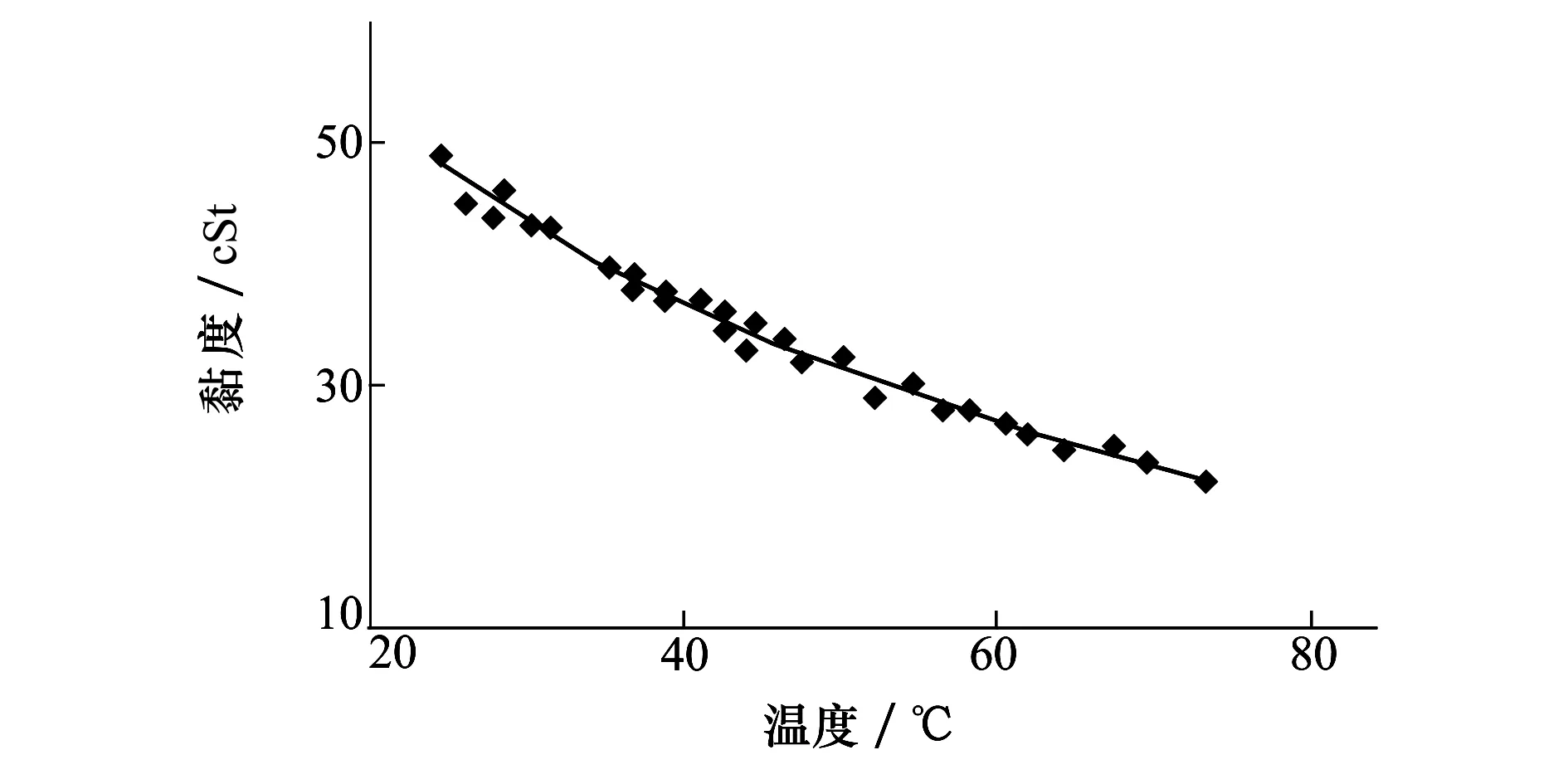
图4 硅油黏度标定结果
1.4 油膜干涉方法及光路设计
油膜干涉法的基本原理是利用硅油在流场中受到流体的推动而发生平移,从而形成楔形油膜。在流场中,受摩擦力影响,流场各处有各自的流动速度,从而导致油膜的厚度和斜率也都不相同,它们之间存在一定的算术关系[13]。于是通过干涉法,就可以得到油膜的厚度变化率,再通过一定的计算就能得到物体的表面摩擦力。
油膜厚度与表面摩擦应力之间的关系如下:
(1)
式中坐标系定义如下:x为模型表面上一点沿来流方向的坐标,y方向为该点处垂直表面的法向方向,z方向满足右手定则。因此,τw,x对应x方向上的表面摩擦应力分量,τw,z代表z方向的分量。h为油膜厚度,为实验实际测量所得。μ为硅油的黏性因数,油膜厚度与干涉条纹间距之间关系如下所示:
(2)
式中,λ为实验所用的单色光波长,φ代表条纹级数。n0为硅油折射率。θi为光线入射角,可以通过测量得到。因而,只要将(2)式带入(1)式,并去掉z方向的摩擦应力分量即可得到所求的表面摩阻因数大小,结果如下:
(3)
式中,θ为光线折射角,可以由(2)式中的入射角经折射定律得出。N为所测量的条纹级数,Δx为N级条纹的总宽度,由实验实际测量得到。q∞为来流动压。油膜干涉原理图如图5所示。

图5 油膜干涉法原理示意图[14]
图6为NHW油膜干涉实验光路设计图。平板模型安装在流场中心位置,由于高速相机不能暴露在风洞驻室的真空环境中,故其通过驻室上方的观察窗对油膜干涉条纹进行拍摄。为了获得模型表面更大的拍摄范围,单色钠灯光源并没有直接照射在模型上,而是通过风洞驻室上方大面积的反光板进行反射后,入射模型表面。这样做的另一个优点是减弱了入射光的强度,柔和的单色光能使干涉条纹更加清晰。

图6 NHW油膜干涉实验光路设计图
2 实验结果与分析
本次实验名义马赫数为5,来流马赫数Ma=4.97,来流总压P0=3.909×105Pa,总温T0=516 K,单位雷诺数为Re=4.7×106m-1。在进行模型表面尺寸标定后进行风洞实验,测量范围为距离平板前缘约50 mm到130 mm的局部区域。取风洞流场建立且总压稳定时作为油膜条纹读取的起始点,每次实验车次时间设定为7 s。为了比对验证实验结果,采用文献[15]中的基于有限体积的高阶紧致格式(CFVM)并行算法,采用隐式大涡模拟的方法对相同来流条件下的光滑平板模型及带三维方形粗糙元的平板模型进行数值模拟,湍流模型采用kω-sst模型,根据实验条件,定义湍流黏性比为0.01。
图7为光滑平板模型在风洞流场建立3 s和4 s时的油膜干涉图像,可以看出,硅油在剪切力的作用下向下游延展,产生硅油薄膜,经单色钠光照射形成清晰的干涉条纹,随着时间的发展,干涉条纹逐步变宽,但相同时刻的条纹间距沿流向逐渐变窄,说明光滑平板模型表面的摩阻因数沿流向逐渐减小。

图7 平板模型油膜干涉图像
图8为风洞流场建立3~6 s,热电偶测量的平板模型各测点处的表面温度,可以看出,相同时刻沿流向模型表面温度变化不大,实验中各点处相隔1 s前后的温度变化也不明显,3 s和4 s时的各点温度相差约0.1℃,但是随着时间的推进,各点温度是逐渐升高的,因此,在能分辨出条纹宽度的前提下,尽量选取间隔较短的初始、最终时刻来减小温度升高造成硅油黏度变化带来的误差。本文选取3 s和4 s时的平均温度来对硅油黏度进行修正,即平板表面温度为48.3℃,由图4可知,此时常温下50 cSt的硅油黏度已经变为33.2 cSt。因此,在用油膜干涉法进行高超声速摩阻测量时,对表面温度进行实时测量是有效和必要的。
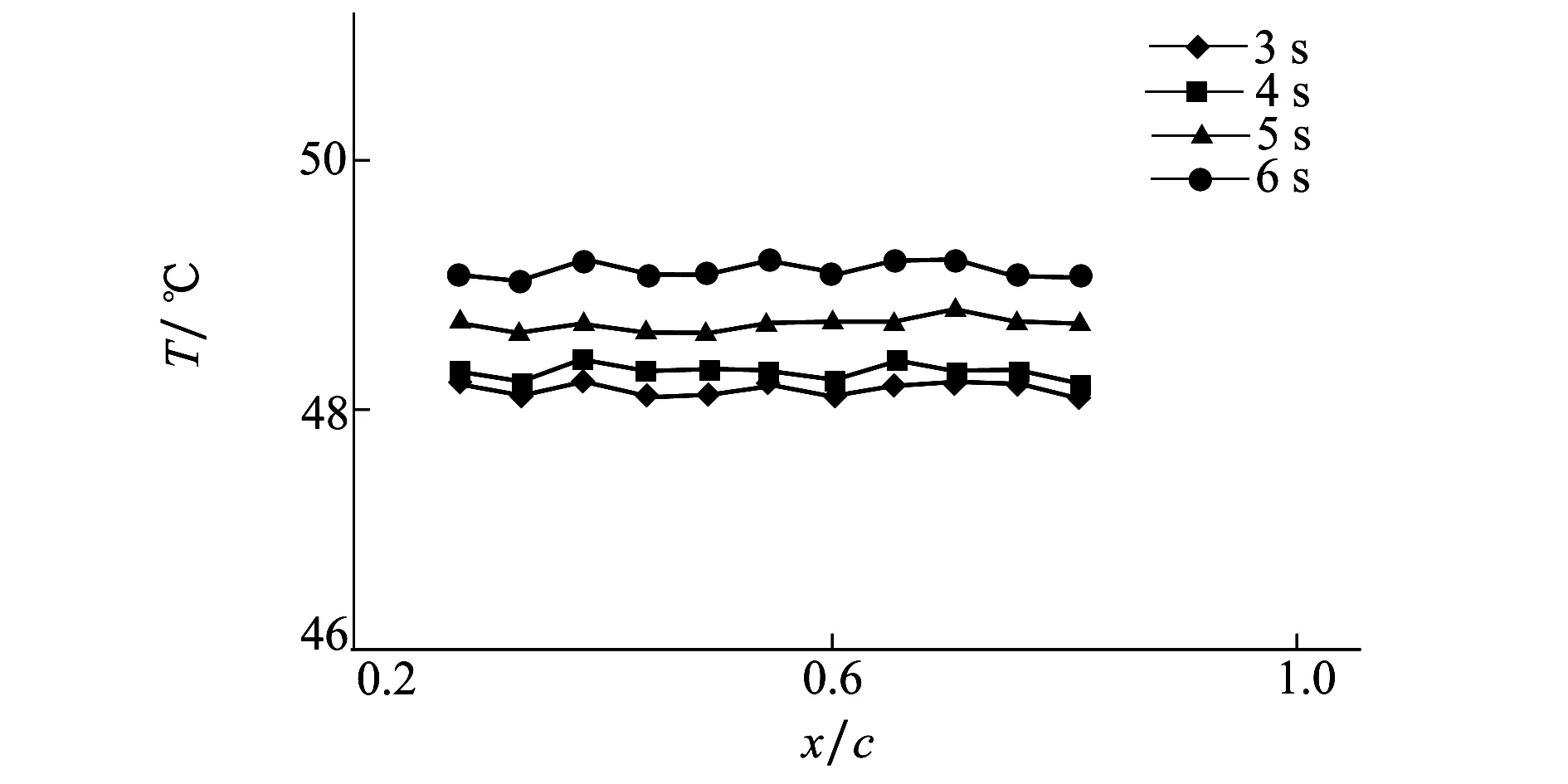
图8 平板模型表面温度
图9为由干涉条纹和温度修正过的硅油黏度计算出的光滑平板模型沿流向中心线上相应位置处的表面摩擦阻力因数和数值模拟结果的比较。

图9 光滑平板数值模拟与风洞实验结果比较
可以看出,光滑平板模型表面中心线处的摩阻因数沿流向逐渐减小,这与图7结果一致,并且风洞实验结果与层流数值模拟结果相吻合,Cf数值约为0.001,表明当前平板边界层流动处于层流流态,在可视范围内没有发生自然转捩,可进一步开展三维粗糙元诱导转捩的实验和计算。
图10为带三维方形粗糙元的平板模型在Ma=5来流条件下的油膜干涉条纹,对比图7可知,粗糙元后干涉条纹较光滑平板模型宽的多,这是由于三维粗糙元在其后方流场中形成尾涡,从而引起平板边界层中强烈的扰动和剪切作用,使层流边界层转捩为湍流。图11为带三维方形粗糙元的平板模型油膜干涉法计算出的沿流向中心线上表面摩擦阻力因数和数值模拟结果的比较。

图10 带方形粗糙元平板模型油膜干涉图像

图11 带方形粗糙元的平板数值模拟与风洞实验结果比较
由图可知,风洞实验结果与数值模拟结果相吻合,三维粗糙元引起了平板表面摩阻因数的增加,在x=137 mm时Cf达到了峰值,约为0.002 75,之后沿流向趋于稳定,这也说明三维粗糙元诱导了平板边界层的转捩,转捩区直至x=137 mm处,之后流动完成发展为湍流。
3 结 论
本文首次在高超声速风洞中开展了油膜干涉法对边界层转捩区域位置预测的实验研究,通过与数值模拟结果的比对,得出以下结论:
1) 采用热电偶可以准确有效地测量模型表面的温度,从而修正因为温度的变化导致实验结果的误差;
2) 对于模型表面的处理,可采用在抛光后的不锈钢模型表面做黑色高温反光漆的方式,既能够清晰地得到干涉条纹,又简单方便;
3) 使用低黏度的硅油大大缩短了风洞吹风时间,使模型表面温度变化较小,从而减小了温度对硅油黏度的影响,提高了测量精度;
4) 对三维粗糙元诱导的平板模型边界层转捩实验研究表明,油膜干涉测量技术可应用于高超声速边界层转捩的研究中,通过表面摩阻因数的变化可对高超声速边界层转捩区域位置进行准确的预测。
