基于知识图谱的国际无人机研究可视化分析
2018-12-28问延安
问延安
(安徽工业大学 公法学院,安徽 马鞍山 243032)
在各国日趋开放低空空域和智能化技术日新月异的背景下,无人机应用日趋从军事应用扩散到民用/公共领域和其他商业领域,民间应用呈指数增长,不单是政府、企业、学校以及公众感受到无人机的助益,而且许多行政工作借助无人机也提升了工作的效率。无人机融入国家空域系统已成世界潮流。民用无人机发展前景广阔,相关产业链不断涌现,亦触发了学术界的研究热潮。现有的国际无人机代表性研究主要涉及微小型四旋翼无人机[1]、无人机遥感系统[2]、无人机自组网应用技术[3]、无人机感知与规避技术[4]、多无人机协同导航技术[5]等方面,但是对国际无人机理论与应用进展的宏观把握与定量分析较为缺乏。
无人机理论及技术发展问题是目前学界共同关注的话题,借助科学计量学的方法对国际无人机研究成果产出和分布进行分析,有利于我国在无人机发展中充分借鉴国外先进成果;国际无人机科学研究主题的演进分析能帮助无人机科研人员从一个全新的视角认识无人机研究对象、研究方法及研究范围等;对无人机知识基础、前沿问题及知识流动的分析,有助于为无人机科研人员提取核心知识,并为我国无人机理论研究及应用实践提供参考。引入科学计量学以及科学知识图谱的基本理论和前沿技术方法,并对无人机的大样本科技文本数据进行分析,不仅能够厘清国际无人机研究的发展情况及研究特征,而且对于无人机的实践应用有指导意义。
一、数据来源与研究方法
(一)数据来源
以Web of Science核心合集中SCI-E和SSCI数据库文献为数据源,检索式为“主题 (unmanned aerial vehicle*) 或 (Pilotless Aircraft)或(Remotely Operated Aircraft)”,时间跨度为1996~2017年,检索时间为2017年9月20日,共得到4114篇论文,去重后最终有效文献3712篇。先将文献题录数据合并导入BibExcel中进行产出分析,生成关键词共现矩阵,结合VOSviewer进行关键词共现分析。再将数据导入CiteSpace,设置节点类型、阈值、剪枝策略等绘制文献共被引网络,利用双图叠加模块,生成知识流动图谱。
(二)研究方法
共词分析计量在同一篇文献中出现的两个表达某研究主题的关键词出现频次,形成所分析主题的共现矩阵,利用聚类、多维尺度和社会网络分析方法进行矩阵类型的转化,所得到的共词网络可以归纳出该研究主题的研究热点、结构与范式。
科学前沿理论先驱普赖斯创立研究前沿概念,用来描述研究领域的动态本质。CiteSpace以此为基础,开创性地综合引证和共引分析,建构了从“知识基础”映射至“研究前沿”的理论模型。依据该模型,研究领域被概念化为从研究前沿到知识基础的时间映射。研究基础可以总结为某一科学领域学者在研究过程中反复引用的文献集合。研究前沿集中体现在研究领域中“新”和“热”的文献上,即近期学者共同关注和研究的某一领域主题文献集合。
陈超美教授与Loet Leydesdorff等人在2014年提出期刊双图叠加技术[6],并将Dual-map模块嵌入CiteSpace中,可用于显示各学科论文的分布、引文轨迹、重心漂移等信息。Z-Score算法集束后的引文弧可以清晰呈现国际无人机应用研究和基础研究的内在学科联系,展现多学科交叉的知识流动过程。
二、国际无人机研究的时空分布
(一)年度发文量时间分布及走势
文献时序分布及走势可以呈现无人机研究受关注程度。从图1可知,WOS核心期刊年度载文分布变化较为明显,主要分为三个时期。1996年至2001年是酝酿期,自1991年美军使用“先锋”无人机在“沙漠风暴”行动中取得不俗战果后,各国开始加大对无人机的研发投入,在此背景下,国际学术界亦开始关注并初步展开无人机研究。2002年至2007年是探索期,以欧盟2002年启动无人机发展项目(CAPECON project,2002~2005)、美国国家航空航天局成立无人机应用中心为契机,各国持续增加军用无人机预算投入,并开始推进民用无人机的应用发展。无人机民用化转向的开启,推动国际学术界亦逐渐聚焦无人机民用应用研究,相关成果持续稳定增长。2008年至今是上升期,受2008年金融危机影响,欧美等发达经济体,包括中国等高速发展国家都步入经济新常态,各国政府出台多项促进民用无人机发展的政策。民用无人机市场井喷式发展态势亦推进无人机研究成为国际学术界热点,从2017年1~9月的发文量超过2016年全年的发文量来看,研究热度还有较高的上升空间(见图1)。

图1 国际无人机研究文献年度分布图
(二)国家/机构的产出分析
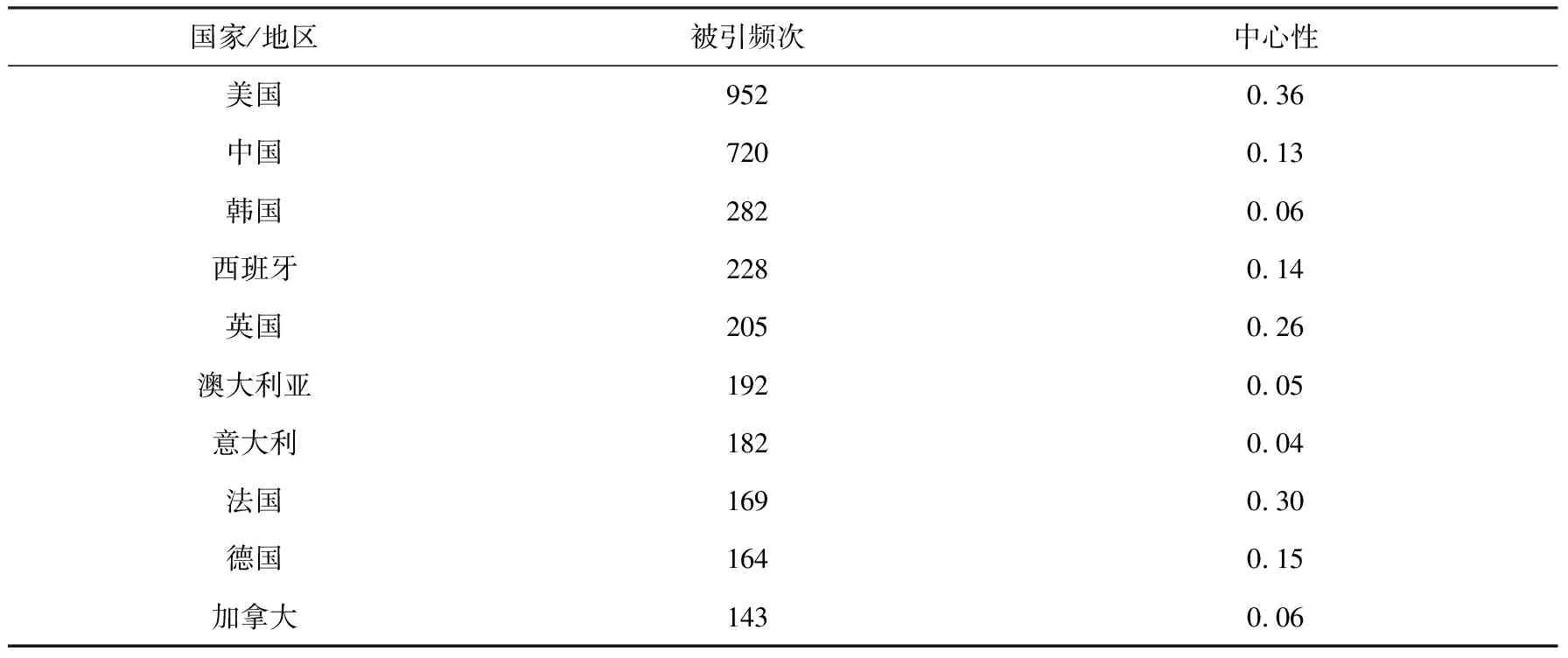
表1 国家研究实力排名

表2 无人机机构研究排名
无人机研究受世界广泛关注,论文产出量大于100的国家见表1。结合国家产出的中心性特征,可见美国及欧洲诸国是国际无人机研究的核心地带,美国作为无人机研究的产出大国,以952篇(中心性0.36)居首,此外,西班牙(228,0.14)、英国(205,0.26)、法国(169,0.30)、德国(164,0.15)的无人机研究亦表现突出。中国载文量高达720篇,位居第二,中心性为0.13,表明中国在国际无人机研究领域论文高产且有不俗潜力。
对重要机构的分析可以帮助定位国际无人机研究的重镇,表2显示了排名前十的无人机研究高产机构,多数为高校,发文量前四皆为中国的高校,中介中心性指数亦表明北京航空航天大学和中国科学院已经成为具有世界影响力的无人机研究机构。美国麻省理工学院发文量虽居第九,但其中介中心性排第一位,说明MIT在无人机研究领域居于世界领先水平。
(三)作者产出分析
无人机研究学者是科学成果的生产者,科学计量无人机研究学者的分布,有助于把握具有高影响力学者的基本情况及无人机研究最新成果。国际论文产量排名前十的无人机学者发文量和H指数见图2。西班牙塞维利亚大学教授Ollero A教授发文量28篇,H指数14为最高,说明Ollero A教授发表的论文至少有14篇的被引次数大于或等于14,其论文在谷歌学术中总被引达8398次,其关于多无人机合作感知系统[7](被引196次)、多无人机合作和控制在负载运输中的应用[8](被引188次)、空中机器人的控制和感知技术[9](被引166次)等研究具有高影响力。他主要聚焦于空中机器人领域研究,领导或参加了100多项由欧盟委员会和美国航空航天局资助的项目,并研发出多项无人机系统的技术和应用,如空中机器人、多自主飞行器系统的操控方法和技术、空中机器人控制和感知技术、异构多无人机合作应用等。韩国科学技术院Kim Youngjoo博士发文41篇,H指数10,位居第二位,作为国际无人机领域的新锐学者,其关于多无人机矢量场分离目标追踪[10](被引27次)、无人机自主导航[11](被引13次)等研究具有较高影响力。

图2 无人机学者发文量及H指数
(四)关键词共现分析
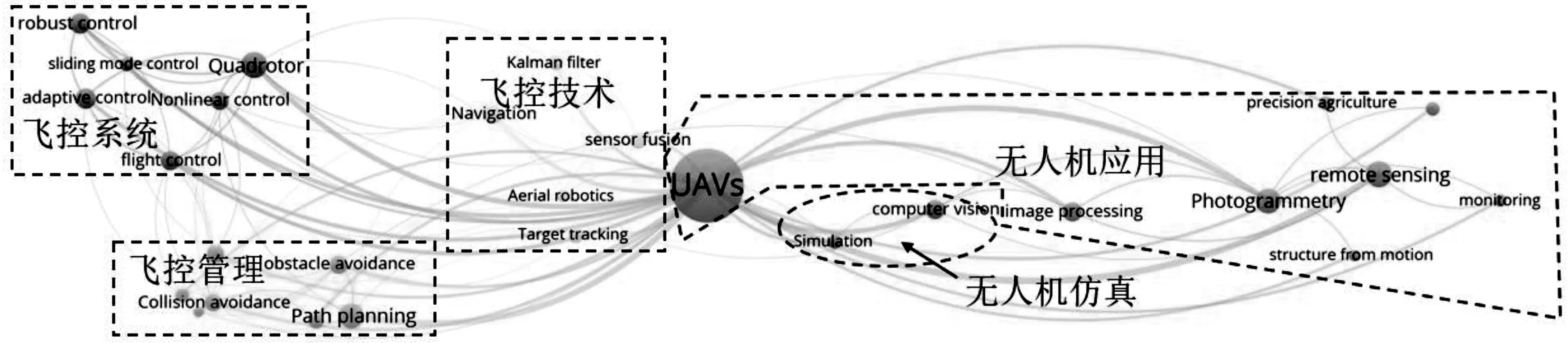
图3 无人机共词网络的主题聚类
通过BibExcel软件提取关键词列表,进行剔除、合并、消歧后导出词频大于19的关键词共现矩阵,用VOSviewer生成高频关键词聚类图(见图3)。国外无人机研究主题分为五大聚类。聚类1的高频词为无人机(UAVs)、遥感(remote sensing)、摄影测量(photogrammetry)、精准农业(precision agriculture)等,综合来看,主要聚焦在无人机应用领域研究。聚类2的高频词为导航(Navigation)、卡尔曼滤波(Kalman filter)、传感器融合(sensor fusion)、空中机器人(Aerial robotics)、目标追踪(Target tracking),皆与无人机飞行控制技术研究相关。聚类3的高频词有四旋翼飞行器(quadrotor)、自适控制(adaptative control)、飞行控制(flight control)、非线控制(nonlinear control)、鲁棒控制(robust control)、滑模控制(sliding mode control),均指向无人机飞行控制系统研究。聚类4的高频关键词包含防撞(collision avoidance)、协同控制(cooperative control)、编队控制(formation control)、多无人机群(multiple UAVs)、避障系统(obstacle avoidance),主要关注无人机飞行控制管理研究。聚类5的高频关键词有计算机视觉(computer vision)、仿真(simulation),主要聚焦在无人机仿真技术前瞻研究。
三、国际无人机研究的知识基础
CiteSpace相较其他文献计量软件,在文献共被引分析及探测知识基础和研究前沿上更有优势[12]。时间区间为1996~2017年,时间切片2年,提取各时间切片前45位的数据,经过寻径算法剪裁文献共被引网络,并进行聚类,所得文献共被引网络用图4表示。其中的高被引和高中介中心性节点文献可以作为无人机研究领域的知识基础。国际无人机研究领域知识基础由6篇高中介中心性和高被引关键文献组成,相关信息见表3。6篇知识基础文献分属五大研究前沿。Rosenell T和 Honkavaara E通过匹配四轴无人机成像系统采集生成的航空图像数据,开发出点云数据生成方法,并评估了SOCET和Photosynth两种点云处理方法的性能,为无人机图像数据的收集、处理及点云数据的精确生成提供了科学建议[13]。Spripalli等人基于实时视觉系统的设计和14次飞行试验,发展出一套算法和着陆策略实现无人机的自主着陆[14]。Lowe DG提出了一种利用SIFT算法从尺度不变的关键点选择可区分图像特征的方法,为无人机高精度自动识别物体和场景提供了重要技术基础[15]。Camille CD Lelong等人通过挂载在无人机上的数码相机与光谱滤光片组合成多光谱装置,验证了无人机用于精密农业遥感应用的可靠性[16]。Castillo P等人提出了一种可用于四轴旋翼小型无人机的控制器设计,通过实验验证了该控制器能稳定自主执行飞行、悬停和着陆任务,为世界上首例可成功应用于四轴旋翼无人机的实时控制器系统[17]。Berni J等人通过配备多光谱成像传感器的无人机遥感农作物,表明低成本无人机在实时作物管理中要优于传统的载人空中传感系统[18]。
四、国际无人机研究前沿
从施引文献的标题提取名词性术语,采用LLR(对数似然率)算法,对共被引网络聚类后的主要类别进行命名,1996~2017年间研究主要包含七大研究前沿,见图4。
聚类#0研究主题为自主飞行。作为最大的聚类,共包含36篇施引文献,平均发表年份为2006年,引用本聚类中参考文献比例最高的两篇文献(引用热度不小于0.17)是该前沿领域的代表性文献。北京航空航天大学机器人研究所丁希仑教授测试和验证了六自由度四旋翼无人机飞行控制器试验台的可行性和应用价值,填补了模拟和实时飞行之间的差距[19]。千叶大学机器人与控制实验室的Farid Kendoul等人设计和开发了用于微型无人机自主飞行导引与非线性控制的系统[20]。传统的线性飞行控制方法往往受到飞行精度不高、飞行参数调节繁复等限制,如何将更为先进的非线性控制方法应用于无人机飞行控制中并取得应用前景,渐成国际无人机研究领域和生产企业关注的焦点。

图4 文献共被引聚类图谱
聚类#1主要聚焦在飞行器制导研究。由24篇施引文献构成第二大聚类。引用热度高于0.25的两篇论文是该领域的代表文献。瑞士洛桑联邦理工学院智能系统实验室Antoine Beyeler等人受飞虫的神经和行为策略启发,开发出基于optiPilot策略的飞行控制平台,实现了无人机的自主避障飞行[21]。Farid Kendoul等人开发出用于导航和控制小型旋翼无人机的自适应视觉自动驾驶仪,为基于视觉线索和惯性数据的无人机提供可靠的导航和控制系统设计方案[22]。这两篇重要文献都发表在同一期的机器人领域顶尖国际期刊《Autonomous Robots》上。聚类#1表明无人机飞行制导及避障这一业内最大难题是国际无人机研究领域的焦点前沿,这一研究前沿的背后折射出的是对“计算机视觉”和“自动化操作”的应用前瞻,是未来机械人学及人工智能应用前沿的支撑应用。
聚类#2关注无人机三维建模研究,23篇施引文献中引用热度高于0.26的有5篇,其中有4篇发表于2016年,都是研究时区内最新的文献。墨西哥国立自治大学卡雷拉·埃尔南德斯等人开发出可应用于四轴旋翼无人机的超高分辨率数字表面模型(DSM),能够构建高精度三维模型,显示(高反射表面)干床湖因活动变形而产生的所有复杂结构(裂缝,穹顶和陡崖)[23]。英国利兹大学M.W.Smith等人讨论了基于无人机的SFM-MVS(结构运动-多视点立体)方法在地形测量中的应用[24]。SFM计算机视觉技术的发展,使得消费级无人机能开发高精度3D点云,继而能以前所未有的易用性和低成本在各种现实场景中进行三维建模。
聚类#3的标签为“四旋翼无人机”,该聚类由22篇施引文献构成,其中引用热度高于0.05的6篇文献都是围绕四旋翼无人机在航空影像数据、低空遥感[25]、自然资源管理[26]、林业资源清查[27]等领域的应用。随着技术发展,2005年前后,多旋翼飞行器开始被研发和使用,四旋翼飞行器作为多旋翼飞行器中最简单的一种,其轻便、灵活、安全、控制简单等特点,成为学术研究和商业应用的焦点前沿。2013年大疆创新的四旋翼无人机Phantom在全球的极大成功,进一步驱动了国际学术界对四旋翼无人机技术研发及应用拓展的热情,四旋翼无人机从最初的玩具蝶变成目前民用无人机领域最为成功的商业产品,并随着研究的深入,进一步向输电线路勘测、野生动物保护、安防监控等公共领域延伸。
聚类#4表明国际无人机领域第五大研究热点为“协同感知系统”。西班牙帕布罗·德奥拉韦德大学Luis Merino等人提供了一种可用于多异构无人机的协同感知系统,并在监测森林火灾的现场试验中验证了协同感知系统的可靠性[28],该文献引用了此聚类中43%的参考文献,是该领域的代表性文献。受限于无人机的飞行载荷,单个无人机所能携带的传感器是有限的。探讨携带多种类传感器无人机群如何实现协同工作,一直是无人机领域研究的前沿热点。
聚类#5显示“集群无人机”是当今国际无人机领域的研究趋势之一。美国辛辛那提大学的Jin Y等人提出了一个提高无人机协同搜索能力和解决无人机群任务分配随机性问题的广泛动态模型,并设计了可应用于多异构无人机协同的算法[29],为集群无人机协同合作提供了技术理论支撑。集群无人机研究源自国防领域的需求,亦逐步向民用领域特别是行业应用领域拓展。无人机群在物流高峰期如何相互规避、集群无人机如何对大块区域进行快速协同地理空间信息采集、在灾区如何快速搭建稳定有效的动态无线通信网络等集群协调应用及技术研发,是当今国际无人机领域的热点。
聚类#6的标签为“无人机平台”,由18篇施引文献构成,其中引用热度0.28以上的2篇文献皆聚焦于无人机平台在精准农业中的遥感应用。在全球耕地面积日趋减少的背景下,世界各国纷纷走向精准农业体系建设,无人机可以成为较为成熟、易用、低成本的提升农业生产效率的手段,精准农业航空应用日益成为无人机领域的研究热点和前沿。
五、国际无人机研究的知识流动分析
CiteSpace具备Dual-map分析模块,可以通过期刊的双图叠加分析来显示国际无人机研究领域论文的分布、引文轨迹、知识流动等信息。下文对国际无人机研究进行期刊层次知识流动分析(见图5)。Blondel算法分析形成期刊聚类,图中椭圆中心表示特定期刊学科领域,双图叠加分为左、右两图,左图中椭圆横轴计量作者人数,纵轴表征发文量;右图椭圆横轴表示被引作者数量,纵轴呈现某期刊被引用次数;Z-Score算法对引证链接进行了标准化处理,引证流集束后能更简洁呈现左右半图之间期刊学科间的引证关系。
图5显示国际无人机研究领域应用研究主要集中在生态学地球科学海洋科学、数学系统工程数学科学两大学科,这两大学科构成了核心区域。同时图谱亦显示国际无人机应用研究的边缘区域众多,物理学材料学化学、神经网络学运动学眼科学、经济学政治学、心理学教育学健康学等四大学科领域都在逐步关注无人机应用研究,多学科共同聚焦国际无人机应用研究的趋势凸显;相较而言,国际无人机研究领域基础研究主要集聚在地球科学地质学地球物理学、数学科学数学力学、系统工程计算学计算机科学三大学科群,并向分子生物学生物学遗传学、植物学生态学动物学、化学材料学物理学、心理学教育学社会学、经济学政治学等多边缘学科区域扩散,表明国际无人机研究领域的基础研究日趋呈现多学科交叉态势。图中施引域中数学系统工程数学科学学科群中有三类不同的引文弧,其中对应的系统工程计算学计算机科学这一学科群的引用量最高,Z值亦最大,为8.723。

图5 国际无人机研究的知识流动
六、国际无人机研究发展态势总体分析
纵观1996~2017年Web of Science核心数据库所收录无人机主题文献,借助BibExcel、VOSviewer、CiteSpace软件对国际无人机研究概况及发展态势进行可视化分析,从总体来看,发展态势如下:
(1)从2008年开始,国际核心期刊刊发的无人机文献大幅度增长,与各国无人机日趋转向消费及行业应用的产业发展态势相互印证、相互驱动。美国和欧洲的无人机研发历史悠久,从军用向民用领域扩展进程启动亦较早,主导了国际无人机研究方向和潮流。中国无人机理论研究亦在近年来异军突起,发文量全球第二,在国际影响力前十的研究机构中占据四席,成为国际无人机研究领域的主流力量。
(2)总览国际无人机研究的知识基础文献,表明对多旋翼无人机相关技术、应用的研究一直是无人机研究的基础。20世纪90年代微机电系统研发的日趋成熟,使得多旋翼飞行器自动控制系统制造成为可能,科研人员聚焦研究多旋翼飞行器的非线性系统结构和控制方案,直到2005年,各种技术瓶颈才被突破,真正稳定的多旋翼无人机自动控制器才被制作出来,学术界亦开始高度关注多旋翼技术,V.Kumar教授在2012年TED所做的演讲进一步激发了学术界发掘多旋翼技术潜能的热情。纵观1996~2017年国际无人机研究领域的发展,以“四旋翼”或“多旋翼”为研究对象的文献占据主流,这也进一步验证了国际无人机研究领域一直把对多旋翼无人机技术研发作为知识基础,并不断驱动前瞻性研究,形成了以“四旋翼无人机”为中心的七大研究前沿。亦表明国际无人机研究日益从军事应用脱域,转向以无人机民用化为中心。
(3)双图叠加分析结果显示国际无人机研究在引证结构稳定的基础上,引证的规模有所扩大,数学系统工程数学科学是国际无人机应用研究的主要学科领域,并从系统工程计算学计算机科学、数学科学数学力学、地球科学地质学地球物理学三大学科获取基础知识来源,反映了国际无人机科学研究的跨学科属性。
近二十年来国际无人机研究完成了从军用向民用的旨趣转变,无人机日趋在物流、摄影摄像、精准农业等民用领域被广泛应用,在技术创新和管理创制上的研究旨趣激增。与大疆创新为代表的“中国制造”消费级无人机在2012年以后迅速席卷全球的背景相呼应,中国无人机理论及技术应用亦日益在消费领域具备国际领先水平,国外在遥感测绘、精准农业、监控安防、通讯中继、物流运输等无人机行业应用技术中具有优势。世界各国都密切关注基于在线辨识理论的自适应控制技术在无人机上的应用,受人工智能技术飞速发展的影响,计算机视觉、自然语言处理、语音识别等技术不断向纵深发展,智能化无人机面貌越来越明晰,无人机集群化亦成为可能。集群无人机不仅能取得战场优势,亦有望成为市场热点,研究在无人机集群编队中的单机控制、集群协同、传感与避障、编队控制等飞行控制管理技术成为国际无人机研究领域的新兴主题板块之一,我国亟须对其进行深入研究,实现无人机集群技术的创新性突破,从而保障我国无人机的军事战略优势和民用发展需求。
