嵌入式高速公路异物侵限的检测与跟踪研究
2018-12-28杨杰超许江淳陆万荣曾德斌
杨杰超,许江淳,陆万荣,曾德斌
(昆明理工大学信息工程与自动化学院,云南 昆明 650500)
0 引言
高速公路异物侵限是一个威胁行车安全的隐患。由于高速公路事故严重程度逐年增加,且高速公路上行车具有速度快的特点,一旦有事故发生,会造成严重的交通事故[1]。目前,我国在高速公路的异物检测上大多采用人工检测的方法,不仅容易产生漏检,而且需要大量的人力、物力,并且有周期限制,导致效率严重低下。
本文提出了一种按适当距离间隔安装在高速公路沿线的、基于机器视觉技术的嵌入式异物侵限报警系统。系统采用嵌入式微处理器ARM作为检测硬件平台核心,结合一套基于支持向量机(support vector machine,SVM)与粒子滤波的异物分类及跟踪算法,在区分异物的同时,将其运动趋势与侵限异物判别相结合,可有效提高具有侵限趋势异物的正确报警率,降低无侵限趋势异物的误报率。
1 系统整体工作原理及结构
该系统由基于ARM的嵌入式硬件平台、摄像机、远程控制终端等组成,系统基本结构如图1所示。
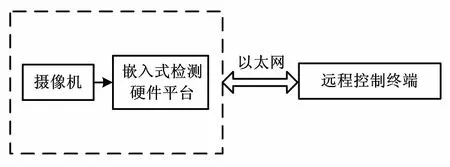
图1 系统基本结构图
每隔适当距离安装一个摄像机,每个摄像机对应一个嵌入式异物检测平台,组成一个节点。当某个节点检测到具有侵限趋势的异物时,通过以太网远程传输信息到控制终端进行报警,并可通过节点所在位置判断出异物所处路段,以尽快排除安全隐患。
嵌入式检测硬件平台以ARM作为主控制中心,与现场可编辑门阵列(field programmable gate array,FPGA)实现图像的采集、局部背景差分以及特征向量的提取。而ARM作为主芯片,利用异物分类、跟踪算法完成整个系统实现异物侵限报警。
2 基于SVM与粒子滤波的异物分类及跟踪算法
在粒子滤波算法的框架下,采用局部背景加权直方图表征目标。此方法可以增强背景和前景的区分性,凸显目标区域内的前景信息,并利用SVM及一组特征向量对其进行分类,以区别异物和汽车。算法流程如图2所示。
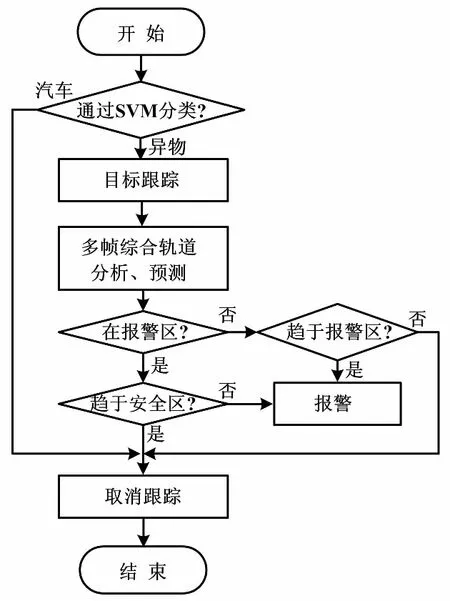
图2 算法流程图
系统核心目标是检测区域内具有侵限趋势的异物并进行报警,以提示工作人员尽快排除安全隐患,所以系统必须具有较好的准确性和鲁棒性。首先,对采集到的每一帧图像进行预处理,通过局部背景加权直方图表征目标,提取出目标的多个特征值组成特征向量,作为SVM的样本数据输入并进行目标分类;然后,利用粒子滤波跟踪器对分类为异物的目标进行轨迹跟踪,并分析异物是否具有侵限趋势、是否需要报警。
2.1 表征目标及分类
试验通过局部背景加权直方图[2]来表征目标。相对于常用的加权颜色直方图[3],其更加稳定、更能准确地找出目标。加权颜色直方图表征算法会因其目标与其背景颜色相似而失效。而局部背景加权直方图相对于背景差分法,更能适应光照变化频繁,且实时性更高。
在当前帧搜索区域定位目标。搜索区域通常由上一帧目标位置决定,跟踪目标由前景和目标内背景组成。
在众多模式识别分类器中,SVM是Vapnik等人根据统计学习理论提出的、建立在结构风险最小原则上的一种新型机器学习方法。该方法具有针对小样本数据学习优势,以及预测算法简单、易于移植、鲁棒性较好等特点[4-5]。因此,本文选取SVM作为目标分类器进行目标的分类,重点区分行进中的汽车及异物。目标特征向量的选取对分类器的效果至关重要。本文选取了以下几个特征值,形成了一组效果较好的特征向量。
①目标背景高宽比。
(1)
式中:B为目标的基本形态;G为目标背景矩形高度;K为目标背景矩形宽度。
②目标占空比。
(2)
式中:D为目标的基本状态;A为目标实际包含像素总数;S为目标背景矩形面积。
③目标形状参数。
(3)
式中:C为目标的外形的复杂及紧凑程度;L为目标实际轮廓周长。
为验证各个特征的分类表现,本文提取了一段试验视频中不同位置的行人、汽车及一些其他干扰物体的相关特征值进行对比,特征值对比如表1所示。正常情况下,所选用的高宽比、占空比、形状参数均具有较明显的稳定性及与其他类型目标的区分性。但由于人很少出现在高速公路,通过这三个特征值的对比,其他干扰物体和汽车的区分性更大,更能满足本文对于区分异物和汽车的要求;此外,根据这三个特征值的分类表现,人的出现也不会影响其区分性。
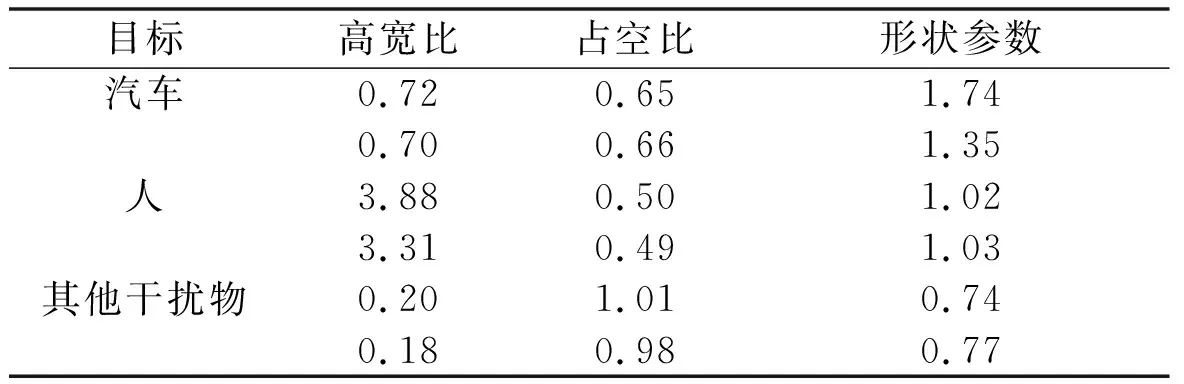
表1 特征值对比
为最终验证分类准确性,通过样本测试试验,提取原始数据集中的500个新样本作为训练集,并在同样场景下提取300个新样本作为测试集。试验准确性达到了92.33%。根据准确性,最终确定高宽比、占空比、形状参数这三个特征值组成特征向量。
2.2 异物目标跟踪
粒子滤波通过序列蒙特卡罗算法,能够较好地处理非线性、非高斯问题。该方法基于大量测量,通过一组加权粒子的演化与传播来递推近似状态的后验概率密度函数,从而获得状态的统计量。其核心是通过一组随机样本及其重要性权值离散,表示所求解问题的后验概率分布[6-13]。
跟踪目标的运动趋势,是通过一些特定的特征来估计整个过程目标的状态。这些目标与跟踪的真实状态不断进行对比和匹配。这个匹配过程一直都是参数修改以及模型的更新。这种预测更新时贯彻整个视频目标跟踪,所以可以用一个动态系统来表示运动模型[8-9]。
动态系统的建立有两个关键的方程:一是状态转移方程,二是测量方程。
xt=ft(xt-1,vt-1)
(4)
zt=ht(xt,nt)
(5)
式中:f(·)、h(·)非线性函数分别为系统模型和观测模型;xt为t时刻的状态;vt-1为系统噪声;zt为t时刻下的观测值;nt为观测噪声。
在实际场景中,目标状态往往是高峰、多峰、非高斯、非线性的,因而很难直接从状态的概率密度函数中采样。采用重要性采样,通过采样点进行加权求和来近似概率函数p(x0∶t|z1∶t):
(6)

(7)
(8)
为了便于权值递推的计算,经过假设,状态的后验分布可近似为:
(9)

3 算法实现流程
在粒子滤波的框架下,对基于SVM的异物分类及跟踪算法总结如下。
①确定目标初始状态,计算模板的局部背景加权直方图,并提取目标特征值组成特征向量。
由FPGA完成图像的采集和预处理,发现目标后,目标所处的局部背景信息可以作为目标在运动过程中的上下文信息,引入局部背景加权直方图来表征目标。
给定目标x:
(10)
②将特征向量投入已经训练好的SVM中进行分类判别,取消跟踪高速公路正规汽车,提高实时性、稳定性。
③确定为高速公路异物时,跟踪此异物目标。
④在比上一帧大两倍的目标区域内再次计算局部背景加权直方图。
⑤计算出观测概率并更新权值。
使用常用方法Bhattacharyya距离[13]来度量两直方图形似度ρ:
(11)
式中:w为直方图维度;Q为目标区域的背景加权直方图;Qm为目标模板的背景加权直方图。
观测概率p如下:
(12)
⑥更新模板。
⑦运动趋势分析,报警。
为了提高系统的实时性、准确性,对异物运动趋势进行分析。为判别是否具有侵限趋势,划分高速公路区域,将高速行车道划分为报警区、非行车道划分为安全区。
报警判断流程如图3所示。
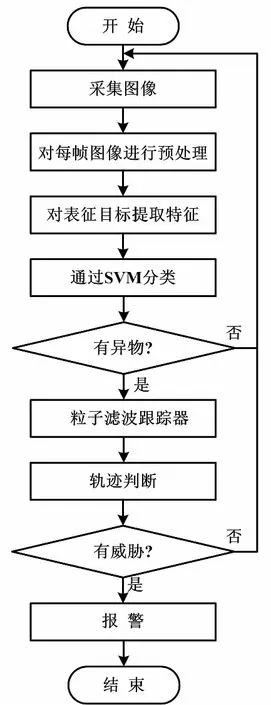
图3 报警判断流程图
对于是否具有侵限趋势,是否取消跟踪的判断,分为两种情况。
①异物处于报警区。对高速公路上异物跟踪进行15帧运动趋势判断。若异物仍处于报警区,判断为具有侵限趋势,并进行报警;若异物趋于安全区,则可取消跟踪。
②异物处于安全区。对高速公路上异物跟踪进行15帧运动趋势判断。若异物仍处于安全区,取消跟踪;若异物趋于报警区,则判断为具有侵限趋势,并进行报警。
4 试验与结果分析
本文采用了多段高速公路监控视频作为试验样本,得出异物的检测与跟踪以及报警准确率的试验结果。
在测试视频样本选取中,大多选用包含静止异物和移动异物的样本。包含静止异物样本的选取是为了测试异物检测与分类的准确性;包含移动异物样本是为了测试目标跟踪及其运动趋势是否对侵限判断的准确性造成威胁。侵限物检测试验结果如表2所示。
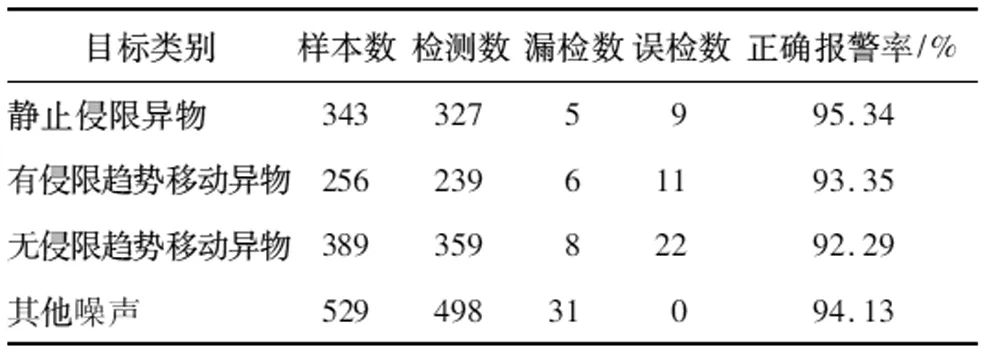
表2 侵限物检测试验结果
由试验可知,本文算法不仅能较好地区分汽车和异物,而且通过区分跟踪,降低了对没有侵限趋势的异物误判率。该算法对移动的有侵限趋势的异物正确报警率达到了93.35%,对静止的侵限异物正确报警率也达到了95.34%,漏检率为1.46%,误检率为2.62%。根据统计,各不同目标检测中出现的漏检数中大部分是由于异物目标距离摄像机太远,像素总和低于滤波阈值被滤除掉而导致的漏检;而误检数大多由于剧烈光照反复无常情况下,以及被汽车遮挡后,目标跟踪时轨迹判断出现检漏及微小误差,对移动侵限异物的报警准确性产生影响。
在有侵限趋势移动异物的检测中,分别出现了11次误检、6次漏检。6次漏检皆为镜头距离和环境因素所造成的;11次误检由于在检测帧数之内将目标异物误检为有侵限趋势的移动异物,包括6次噪声样本、5次无侵限趋势的移动异物。综合分析,虽然试验中针对单幅图像统计出现了漏检和误检,但对于系统整体而言,仍能够区别汽车和异物,对侵限异物具有较高的报警准确率,可以在实际情况中运用。
将算法最终移植到ARM芯片中的嵌入式硬件平台,同时将检测区域划分模板和训练好的SVM存储到硬件平台中,可随时读取,提高了系统的实时性。
5 结束语
本文提出了一种基于SVM与粒子滤波的异物分类及跟踪算法,在局部加权直方图的目标表征下,提取目标特征值为分类器提供特征向量以区分汽车和异物,根据运动趋势判断出是否具有侵限趋势,对具有侵限趋势的异物进行报警。试验表明,该系统不仅能准确区分出异物,有效去除了无侵限趋势的异物的误报率,而且具有相当高的报警准确率。
