Channel Modeling and Performance Analysis for UAV Relay Systems
2018-12-26XiaominChenXujunHuQiumingZhuWeizhiZhongBinChen
Xiaomin Chen, Xujun Hu, Qiuming Zhu,*, Weizhi Zhong, Bin Chen
1 College of Electronic and Information Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
2 College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
3 College of Computer Science and Technology, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
Abstract: In this paper, a multi-hop relay channel model based on unmanned aerial vehicles (UAVs) is established by taking into account of the propagation loss, shadowing,and multi-path fading. Based on the proposed channel model, the cascaded propagation loss of relay link and the cascaded probability density function (PDF) of channel fading are derived. Moreover, the theoretical performance of the UAV-based relay system, i.e., the outage probability, bit error rate (BER), and channel capacity, is also analysed and derived.Simulation results show agreement with theoretical results for the hill, mountain, and sea scenarios, indicating the accuracy of both the simulations and derivations.
Keywords: UAV relay system; relay channel model; outage probability; bit error rate; channel capacity
I. INTRODUCTION
Due to their simple structure and low cost,unmanned aerial vehicles (UAVs) have been widely used in communications, rescues,and environmental monitoring [1]-[4]. UAVs also have been considered as the mobile base station in the fifth generation (5G) communication systems [5]-[7]. Recently, research on UAV-based relay systems has become a hot topic, since such studies can improve the connectivity, coverage and quality of mobile adhoc network (MANETs) [8]-[10].
A novel method was proposed to drive an UAV to an optimal location in [11]-[14]. The UAV can gradually approach the optimal location by leveraging compressive sensing theory to estimate the link qualities in the candidate space. In addition, a self-organizing approach used to control an UAV relay network was presented in [15]. Meanwhile, the maximum coverage was derived with the optimal flight altitude of an UAV, which was an important factor for the relay network studied in [16]. On the other hand, it is vital to evaluate the theoretical performance of the relay system [17]-[21]. The outage probability of a relay channel was studied in [17], and the theoretical performance of M-relay amplify and forward (AF)cooperative networks was derived in [18]. In[18], the M-relay cooperative network model included the impacts of time-selective fading,estimation errors and the speed of the receivers’ estimation loops. The level crossing rate and average fade duration of multi-hop relay networks were analyzed in [19], in which a cascaded Nakagami fading channel model was proposed based on the log-normal function approximation. However, the aforementioned theoretical works on performance evaluation in [17]-[19] are only for the conventional relay systems. A virtual multiple-input multiple-output (MIMO) relay system model for the UAV communication was developed in [20]. On this basis, the authors analyzed the achievable bit error rate (BER) performance of the uplink. In addition, a relay network for UAVs was proposed in [21], in which a variable-rate relaying approach was proposed to optimize the achievable performance. It should be mentioned that the channel models proposed in[20] and [21] did not take the shadowing into account. However, recently the measured data in [22] and [23] shown that the shadowing has a significant influence on the air-to-ground(A2G) channels. This paper aims to fill these research gaps. Overall, the major contributions of this paper are summarized as follows:
In this paper, a relay channel model and its statistical properties are developed and derived.
1) By taking the propagation loss, shadowing, and multi-path fading into account, a multi-hop relay channel model based on UAVs is developed in this paper.
2) Based on the proposed relay channel model, considering the influence of path loss,AF gain and antenna gain, the cascaded propagation loss of relay link is derived. Meanwhile,the cascaded probability density function (PDF)of channel fading including the shadowing and multi-path fading is also derived.
3) The theoretical performance such as the outage probability, the average BER (ABER), and the channel capacity are analyzed and validated.
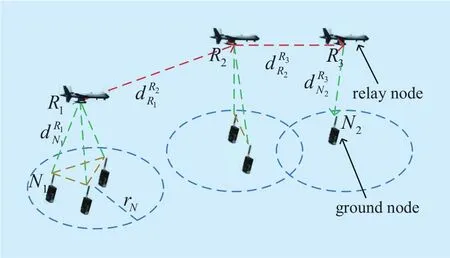
Fig. 1. A multi-hop UAV relay system.
The rest of this paper is organized as follows. In Section II, a new multi-hop UAV relay channel model is established. In Section III, the theoretical results of cascaded propagation loss, fading PDF, and theoretical performance are analyzed and derived, respectively.In Section IV, the derived results are validated and analyzed by simulations. Finally, conclusions are given in Section V.
II. RELAY CHANNEL MODEL
We consider a typical multi-hop UAV relay system with the narrow band condition shown in figure 1. In this figure, N1,N2are the ground nodes located in different sub-networks, and Ri,i =1,2,3 is the UAV relay node within the effective coverage radiusrepresent the propagation distance of the ground-to-air(G2A) and A2G links, andis the propagation distance between different UAVs,which is typically represented as an air-to-air(A2A) link.
The G2A and A2G links are influenced by multi-path and shadowing fading, which cause random fluctuations in the received signals.Considering the influence of propagation loss, shadowing, and multi-path fading, the received signals of relay node R1and ground node N2can be modeled as

where µ is the mean power of fading and σxdenotes the shadowing factor. In addition,are the multi-path fading of the G2A and A2G links. These terms cause fast changes in the power of the received signal since the propagation environment is always complicated and changeable. The multi-path fading models primarily include the models of Rayleigh, Rice and Nakagami. One of the most popular and flexible models is the Nakagami model, which can be expressed as [24]

where Γ(m),Ω are the Gamma function and the mean power of multi-path fading, respectively, and m≥0.5 denotes the Nakagami factor. The Nakagami distribution becomes the Gaussian and Rayleigh distributions when m is equal to 0.5 and 1, respectively. Otherwise,the Nakagami distribution becomes the Rice distribution when m>1.
The channel fading can be ignored in the A2A link since the line of sight (LoS) path always exists and is visible. In a multi-hop UAV relay system, the received signal of the relay node can be modeled as

i+1propagation loss and the delay of the A2A link between Riand Ri+1. Therefore, the received signal of N2can be derived for the total communication link, expressed as


III. CHARACTERIZATION AND PERFORMANCE ANALYSIS
3.1 Cascaded propagation loss
In a multi-hopUAV relay system, the cascaded propagation loss, including the G2A, A2A and A2G link propagation losses, can be expressed as

Considering the influence of path loss, AF gain and antenna gain, the cascaded propagation los can be further expressed as
Considering that the computations of path losses in different relay links are the same, the parameter αdBrepresenting the relay link path loss can be expressed as [25]

where fMHzis the carrier frequency expressed in MHz and dkmis the propagation distance of the comunication link expressed in km.
For the multi-hop UAV relay system in figure 1, suppose tht all the ground nodes and relay nodes are equipped with a normalized omnidirectional antenna. Furthermore,=2km,i = 1,...,N −1 ad=500m. To evaluate the influence of the relay node number and the carrier frequency on the propagation loss of this system,the cascaded propagation loss is provided in figure 2 for different relay node numbers and carrier frequencies. As shown in figure 2, the cascaded propagation loss increases linearly as the relay node number increases or fixed carrier frequency. Meanwhile, the influence of the carrier frequency on the cascaded propagation loss gradually increases as the relay node number increases.
3.2 Cascaded channel fading
In a multi-hop UAV relay system, the multipath and shadowing cascaded fading can be expressed as

The final result is derived by substituting(2) and (3) into (12). However, a closed-form expression cannot be obtained in this way.Therefore, it is difficult to derive the statistical characteristics and performance of a multi-hop UAV relay system. The Gamma distribution for accurately approximating a log-normal distribution can be used to model the shadowing,which is expressed as [26]

Fig. 2. Propagation loss for different relay node numbers and carrier frequencies.
Finally, the composite fading distribuion of the G2A or A2G links can be derived by substituting (3) and (13) into (12) as
where m,msrepresent the respective shape parameters of the mult-path and shadowing, and Ωsdenotes the mean power of the channel fading in the A2G or G2A link. Kv(⋅) is the Neumann function of order v. Note that (15) is also known as the generalized K (GK) distribution [27],which has been widely used in radar, sonar and optical communication channel modeling.
To further derive the equivalent PDF of the cascaded fading, according to the definition of moment generating function (MGF) [28],the MGF that corresponds to the cascaded GK distribution can be expressed as

where f(x1),f(x2) represent the composite fading distribution of the G2A andA2G links,respectively.
By substituting (15) into (16) and using the double integral formulas in [28] and [29], the MGF of the cascaded fading can be obtained as

where mi,msi,i =1,2 represent the factors of the multi-path and shadowing in the G2A and A2G links, respectively,,i =1,2 denotes the mean power of the channel fading in the G2A and A2G links, and G[⋅] is the Meijer-G function [29].
By using the inverse Laplace transforms in[30], the cascaded fading distribution for the G2A and A2G links can be derived as

where L−1[⋅] is the inverse Laplace transformation [30].
3.3 Performance analysis
The outage probability is defined as the probability that the instantaneous signal-to-noise ratio (SNR) of the receiver is less than the required threshold of the receiver. The channel would be interrupted when the SNR of the signal received by N2is less than the required SNR threshold r0. The outage probability can be expressed as [25]

where fR(r ) denotes the PDF of received SNR. Let us set X as the random variable following the distribtion of (18), the instantaneous received SNR of N2can be calculated by
where PtN1is the transmitted power of N1, E is the instantaneous cascaded propagati loss, and N0is the noise power.
By using the Jacobian theory, the PDF of the instantaneous received SNR in the multihop UAV relay system canbe obtained from(18) and (20) as

where R is the average received SNR and it can be calculated by
Substituting (21) into (19), the outage probability of a multi-hop UAV relay system can be finally expressed as

The BER is also very important on evaluating the performance of wireless communication systems. The ABER for the multi-hop UAV relay system can be defined as [31]

where Pe(r ) is the corresponding instantaneous BER when the SNR is equal to r. For the relay ystem with binary phase shift keying(BPSK) signals, the instantaneous BER has been derived by [31] as

Substituting (21), (25) into (24) using the integral formulas in [29], the ABER of a multi-hop UAV relay system can be finally derived as

The channel capacity is the maximum rate at which information can be reliably transmitted over a communication channel. The average channel capacity can be defined as [25]

In a similar way, by substituting (21) into(27), the average channel capacity of a multihop UAV relay system can be derived as [32]
IV. SIMULATION RESULTS AND VALIDATION
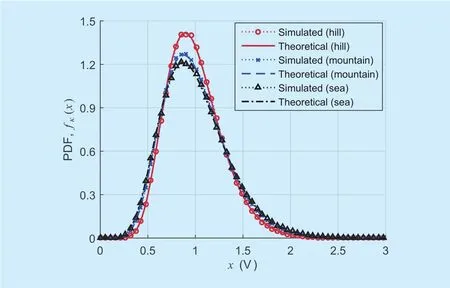
Fig. 3. Theoretical and simulated PDFs for the cascaded channel fading in different scenarios.

Fig. 4. Theoretical and simulated outage probability for different scenarios.
We have proposed some methods to generate shadowing and mlti-path fading in [33] and[34]. In the following, these methods would be used to validate our derived theoretical results in the relay link. Based on the measured results presented in [22] and [23], we set the simulation parameters of the A2G fading channel as µ2=1, σx2=3.2dB, 3.9dB, and 4.2dB and m2=10.3, 9.2, and 9.6 for the scenarios of over the hill, mountain and sea, respectively.For the G2A link, the simulation parameters of the fading channel are µ1=1, σx1=1.1dB and m1=11.3. In figure 3, the empirical distribution obtained from the simulation data is compared with the theoretical distribution,where the simulated sample numbers are equal to 106. As shown in figure 3, the empirical distribution of the received signal are consistent with the theoretical distribution for the three scenarios. According to the PDFs of received signal, the communication quality of the hill scenario is best and that of the sea scenario is worst. From the measurement results in [22]and [23], we can see that a number of boats and large ships, as well as the sea surface, provide serious multipath over the sea scenario.Meanwhile, the mountain peaks also cause a severe multipath effect over the mountain scenario. However, the bare flat ground and many buildings near the ground node have relatively little effect on the fading over the hill scenario.
To verify the accuracy of (23), (26) and (28),we assume that all UAVs in the dual-hop UAV relay system are equipped with normalized omnidirectional antennas and have normalized AF gain. The carrier frequency is 968 MHz. The transmitting power is normalized and equals to 0dBm. To make the instantaneous received SNR change between -10dB and 30dB, the relative noise power is set as -273dBm. The ground nodes are below the relay node andi=1,...,N−1 is equal to 2km. In addition,the SNR threshold is 0dB. As shown in figure 4, the simulated results of the outage probability are consistent with the theoretical results for all three simulation scenarios. Due to the increasing in path loss, the outage probability gradually increases as the flight altitude increases over certain environments. When the flight altitude is less than 300 m, the outage probability is close to zero. Meanwhile, when the flight altitude is greater than 800 m, the outage probability is close to one. The outage probability is best under the scenario of hill when the flight altitude is low, while it is the best under the sea scenario when the flight altitude is greater than 550 m. When the outage probability is between 0.1 and 0.9, the influence of flight altitude on outage probability decreases in the order of the hill, mountain and sea scenarios. Based on the results in figure 3, the PDF of the received signal is primarily concentrated in the scenario of hill, causing the greatest influence on the outage probability due to the varying flight altitude.
For the dual-hop UAV relay system, the ABER under the three scenarios are given in figure 5. As presented in this figure, the statistical results of the ABER are consistent with the theoretical results for various scenarios. The ABER gradually increases as the flight altitude increases under certain environments. When the flight altitude is constant, the ABER increases in the order of the hill, mountain and sea. When the flight altitude is less than 600 m, the ABER is less than 0.001. Therefore, the dual-hop UAV relay system exhibits good performance.
For the multi-hop UAV relay system, the flight altitude and number of UAV relay nodes have a strong influence on the average channel capacity, which is simulated for all three scenarios in figure 6. As presented in figure 6,the simulated results of the average channel capacity are consistent with the theoretical results for the various scenarios in both the single-hop and dual-hop UAV relay systems.In addition, the average channel capacity of the hill scenario is slightly greater than that of the mountain and sea scenarios. Meanwhile,the average channel capacity of the single-hop is greater than that of the dual-hop UAV relay system. However, the average channel capacity gradually decreases as the flight altitude increases over certain environments. Furthermore, the influence of flight altitude on the average channel capacity becomes gradually weaker as the flight altitude increases.
V. CONCLUSION
The performance of a multi-hop UAV-based relay system can be significantly degraded due to cascaded propagation loss, shadowing, and multi-path fading. In this paper, a relay channel model and its statistical properties are developed and derived. On this basis, the theoretical performance of the outage probability, the ABER, and the channel capacity is derived and validated by simulations. These theoretical results can aid in the design, optimization and evaluation of UAV-based relay communication systems.
ACKNOWLEDGEMENTS
This work was supported by the National Key Scientific Instrument and Equipment Development Project (Grant No. 2013YQ200607),China NSF Grants (Grant No. 61631020),Aeronautical Science Foundation of China(Grant No. 2017ZC52021), the Fundamental Research Funds for the Central Universities(Grant No. NJ20160027), and Open Foundation for Graduate Innovation of NUAA (Grant No.kfjj20160412 and kfjj20170405).
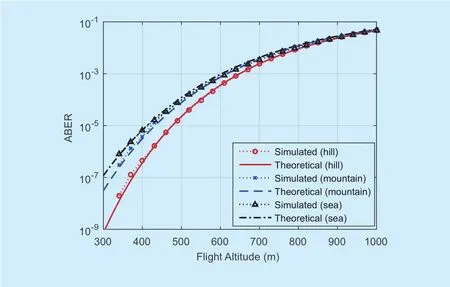
Fig. 5. Theoretical and simulated ABER for different scenarios.

Fig. 6. Theoretical and simulated capacities for different scenarios.
杂志排行
China Communications的其它文章
- Pedestrian Attributes Recognition in Surveillance Scenarios with Hierarchical Multi-Task CNN Models
- Cost-Aware Multi-Domain Virtual Data Center Embedding
- Statistical Analysis of a Class of Secure Relay Assisted Cognitive Radio Networks
- Moving Personal-Cell Network: Characteristics and Performance Evaluation
- A Novel 3D Non-Stationary UAV-MIMO Channel Model and Its Statistical Properties
- Mode Selection for CoMP Transmission with Nonideal Synchronization