带有炸点识别的图像采集系统设计
2018-12-26,,
, ,
(西安工业大学陕西省光电测试与仪器技术重点实验室,陕西 西安 710021)
0 引言
炸点测量可用于评估炮兵射击训练效果[1],同时对提高弹药毁伤效果提供依据和支持。在靶场测试中,需要准确地获取炮弹或者火箭弹的炸点位置,以评估战斗部的毁伤效果。因此,提高靶场测试效率,实现对炸点实时准确地识别与定位具有重要意义[2]。
对炸点测量的方法主要有激光探测法[3-4]、视频测量法[5-6]等。激光探测法在视场小、范围窄的系统中测量精度较高,但因为激光光束较窄,所以在视场大、范围广的靶场环境中无法满足测试需求。视频测量法是目前测量弹丸炸点较为常用的方法。此法较为可靠且精度高。对炸点图像进行测量的装置由高速相机、图像采集卡和计算机构成。由于高速相机循环存储数据的特点,相机以交汇测量的方法长时间凝视式观测使得数据存储量大,后期图像处理繁杂。如果使用外触发装置启动高速相机工作,势必会增加整个测试系统的复杂度,也制约着高速数据采集的过程。所以需要一种自动识别炸点的数字图像采集处理系统,便于高速相机自动获取图像数据,以减少海量的图像存储数据。
在此,设计了一种可自动识别炸点目标的图像采集系统。采用高速相机技术获取弹丸爆炸过程的图像,利用图像处理分析技术对图像进行目标实时检测和识别,当确认目标事件发生时输出触发信号,启动采集卡工作、存储炸点图像,进而完成对炸点目标的测量。
1 系统硬件部分
设计了带有炸点识别技术的图像采集系统,主要由面阵相机(对炸点图像进行拍摄),CameraLink(传输数据流),基于FPGA的图像分析处理模块,图像采集卡和计算机处理端5部分组成。系统总体结构如图1所示。

图1 系统总体结构
对炸点进行基于图像处理的识别,就需要在图像采集和处理部分中,设计控制面阵相机采集图像的硬件系统。硬件系统包括外围电路的设计和FPGA片内的硬件处理判定模块。
1.1 外围硬件设计
为了实现低成本、小体积、高速率、更稳定的图像数据传输,就要设计基于CameraLink接口的数据传输硬件平台。CameraLink是一种专门针对机器视觉应用领域的串行通信协议,使用低压差分信号LVDS传输[7],其中包括电源信号、视频数据信号、相机控制信号和串行通信信号。目前,基于CameraLink接口的数据发送和接收,大多采用专用的串并转换芯片DS90CR287。DS90CR288A与相机进行数据传输,所用的芯片及接口配置方法成熟,且可控性较高。基于FPGA的图像分析处理模块是完成炸点识别的主要部分,原理上相当于在面阵相机与采集卡的数据流传输之间进行图像的预处理。外围硬件设计的构成如图2所示。

图2 硬件系统构成
1.2 FPGA片内的硬件处理判定模块
相机拍摄图像通过CameraLink传到基于FPGA的图像分析处理模块,在FPGA电路内部进行帧图像处理。相机拍摄图像一路通过FIFO模块数据缓存,再传给采集卡;另一路图像通过LVDS接口模块和CameraLink协议模块发送至图像存储模块,在SRAM模块中存储并提取,再通过炸点识别的软件系统判定图像中是否有炸点。后续的炸点识别算法在硬件判定模块内进行。FPGA片内结构如图3所示。

图3 FPGA片内结构
2 炸点识别算法
2.1 背景差分法
在运动目标检测中常用的方法有背景差分法。这种方法事先把背景图像存储下来,然后将前景图像与背景图像作差,利用2幅图像相减所获取的具有动态特性变化的部分对可疑区域进行判定[8]。
id(x,y,i)=f(x,y,i)-b(x,y)
(1)
id(x,y,i)为差值图像;b(x,y)为背景图像;f(x,y,i)为图像系列;(x,y)为图像位置坐标;i为图像帧数。
一般情况下,由于运动物体在灰度上与背景灰度存在着很明显的差异,这样作差之后的差值图像只是在运动物体处有较大的灰度值。选取适当的阈值T。当差值图像的灰度值大于T,视为识别到炸点;当灰度值小于T,视为爆炸未发生。用公式表达为:

(2)
bid(x,y,i)为判定炸点的函数。
此法的优点是对运动目标的检测十分有效,而且对发生变化的图像很敏感,由于2幅图像的时间间隔很短,所以其受诸多干扰的可能性很小。但当目标区域的图像发生长时间重叠时,一般就对识别的对象很难检测了[9-10]。
2.2 火光特性识别算法
由于弹丸的极速爆炸,采集到的图像中火光特征空间发生较大变动,且其他大多数物体呈静止状态,可以识别的火光动态特征也有显著的变化。因此,提出采用火光变化特性算法的数字图像处理的识别方法。
在对面阵相机持续拍摄的图像进行处理时,在时刻T时,设图像上某一点(x,y)的灰度值为Bi(x,y),在时刻T+nΔT时,设图像上该点的灰度值为Bi+n(x,y)。ΔT为高速相机拍摄的每帧图像的间隔时间。对n值的选取可随实际爆炸速率情况发展而选取1,2,3等。因为爆炸具有发光、放热、变化率明显的特性,所以在图像中爆炸区域的亮度值相对背景区域的亮度值要高,而火光的外形特征在图像中也表现为在短时间内的急剧变化。由火光变化率的特性知,当弹丸发生爆炸时,T+nΔT时刻(x,y)点的图像灰度值相较于T时刻会陡然上升,以此来识别目标事件是否发生。
设u为图像灰度差值与时间的比值,则有:
(3)
ΔQ为Bi(x,y)与Bi+n(x,y)的差值;t为nΔT。当u=0即Bi+n(x,y)=Bi(x,y)时,火光变化率为0,视为没有识别到炸点;当u>0时,Bi+n(x,y)≫Bi(x,y),则识别到爆炸图像。
2.3 软件设计系统
对炸点图像的识别,如果只依靠颜色或者形态变化规律可能无法对炸点进行有效识别。在弹丸爆炸过程中,除火光外,还会伴随有烟雾的产生,所以还可用烟雾特征的方法来提高对炸点图像辨识度。软件系统的设计主要包括对炸点识别的总体算法流程,即基于火光特性与烟雾区域融合的炸点识别算法。火光在图像中的外形特征表现为在短时间内的急剧变化,而烟雾可表现为长时间、大面积并伴有扩散的特征。因此根据烟雾的不确定性,当拍摄到当前帧图像的背景图像后,用背景差分法检测到数字图像中有目标的区域,当目标区域的图像被检测出来的时候,可采用Otsu法[11]对其进行图像分割,并对烟雾面积选取适当的阈值。若烟雾面积大于此阈值,视为有烟雾产生即识别到炸点,否则视为未爆炸。
在对炸点的识别过程中,可先通过提取火光的变化特性,在未有效识别到火光时,再利用烟雾特征算法的方法来处理图像,进而实现对炸点的识别。具体算法流程如图4所示。
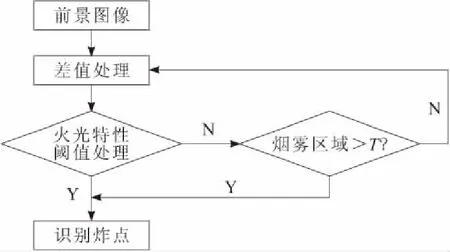
图4 识别算法流程
3 实验验证
选用普通相机拍摄炸点目标的图像,图像帧频为50 Hz,图像分辨率为640 px×352 px。以此来进行模拟试验,并验证算法的可行性。提取3个时刻的图像,如图5所示。

图5 3个时刻的炸点图像
对图5用本文提出的算法进行处理。当图像中有炸点时,目标区域的灰度图像有较大变化,此时可识别到炸点,其灰度图像如图6所示。

图6 炸点识别灰度图像
根据火光特性识别算法,使用MATLAB[12]测算到目标区域内某点的灰度值随时间变化的关系,如图7所示。可见在7.52 s时灰度值开始变化,到7.58 s时灰度值达到最高值,而当灰度值变化率即灰度值与时间间隔的比值不为零时,可认为有爆炸发生。炸点时刻依次为7.54 s,7.56 s,7.58 s,因此在这一时间段识别到炸点。系统在此时记录炸点时刻,并开始存储图像。

图7 灰度值变化与时间关系
4 结束语
提出一种基于数字图像的自动识别炸点目标的方法。该方法通过设计面阵相机采集图像的外围电路,以及利用火光变化特性和烟雾特征,实现对炸点目标进行识别。实验验证表明,该方法可有效识别炸点图像中的火光和烟雾,并能克服其他光照、噪声等因素的影响。所提方法可为靶场炸点测量系统提供一种图像数据采集方案。