AGVS在玻纤行业的应用
2018-12-22谢昊天李昌臣
文/李 伟 谢昊天 李昌臣 祝 薇 周 宇
一、引言
1. AGVS概述
AGVS是自动导引车系统的简称,具有工作效率高、结构简单、可控性强、安全性好等优点。AGV是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及多种移载功能的运输车。与物料输送中常用的其他设备相比,AGV的活动区域无需铺设轨道、支座架等固定装置。因此,在自动化物流系统中,AGVS最能充分地体现其自动性和柔性,实现高效、经济和灵活的无人化生产。
2. AGVS的总体结构和地面控制部分结构
AGV小车通过无线网络连接监控机、管理机,AGVS总体结构,图如图1所示:
AGVS地面控制部分主要由物流系统管理机、AGV系统管理监控主机组成,其中AGV管理和监控计算机是AGV系统运行的核心,主要功能有:执行任务命令;为不同的运输任务分配最优的AGV小车;为每个运输任务安排运输路线;控制AGV系统中的多台AGV小车的交通;处理现场的一些输入、输出信号。如图2所示。

AGVS在某玻纤物流项目中的应用
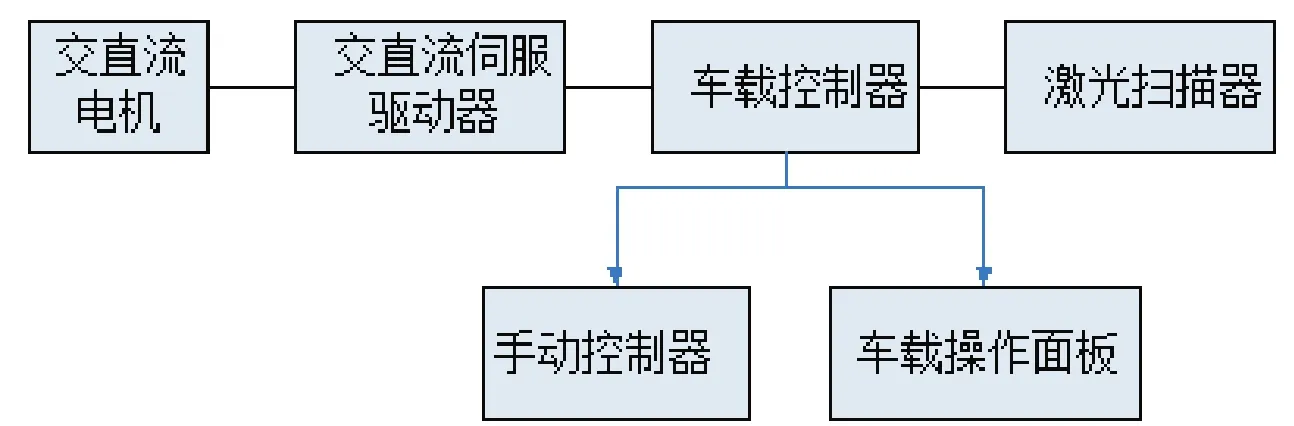
图1: AGVS总体结构图

图2: AGVS地面控制部分
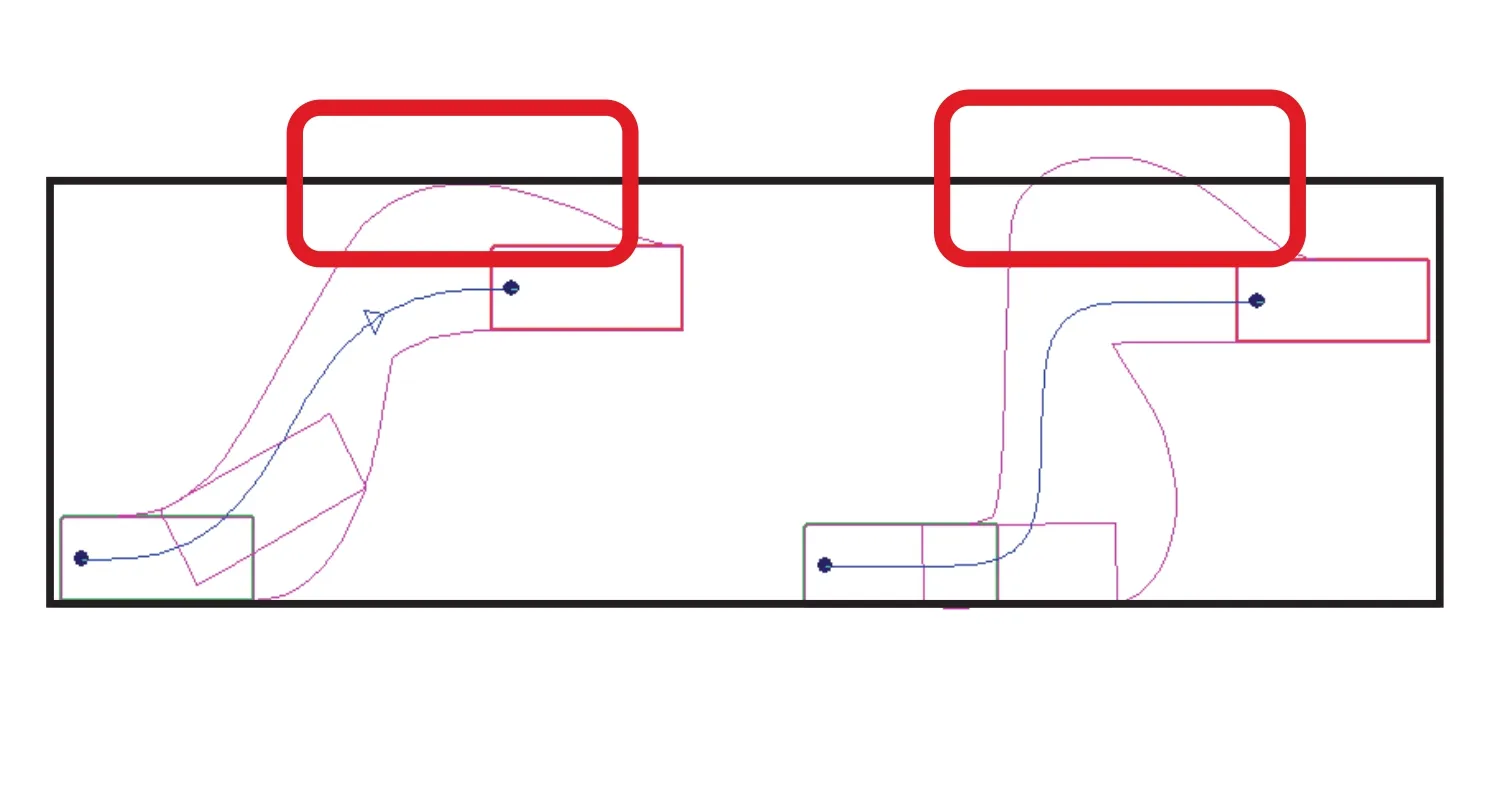
图3:柔性曲线产生的包络线 常规模式产生的包络线

图4:未使用Drawing Line的包络线 使用Drawing Line的包络线
二、某玻纤物流项目生产工艺流程与AGVS具体实现
1.满纱车搬运
生产过程中,物流系统下达任务请求给AGV管理系统,AGV管理系统自动调度指定AGV小车空车从待命站运行至对应的链条输送机位置,链条输送机下降到低位,并脱离纱车。交互信号确认后,AGV取上络纱装满纱车,将纱车自动搬运至指定的地面暂存位置上。
2.空纱车返回
机器人取走纱团之后,下发取走空纱车指令,物流系统自动发送任务请求给AGV管理系统, AGV管理系统接收到指令后自动调度AGV小车空车运行至纱车位,取上空纱车,将空纱车自动搬运至物流系统指定的链条输送机上。
三、系统设计的重点问题和项目应用中的技术创新
1.系统优化
(1) 柔性曲线及其优化工具以及Drawing Line Tool工具的使用
由于项目现场物理空间特别狭小,支路通道狭窄,采用常规模式画线段不能满足要求。采用柔性曲线,能够保证在画一条线段时自动分析线段起点和终点的坐标差距,并且结合小车转向的最大角速度和最大速度把线段分成若干小段,然后通过优化工具进行优化,使AGV小车占用空间最小。图3为柔性曲线模式和常规模式产生的包络线,它们的起点和终点坐标均相同,如红框所示,柔性曲线模式占用的空间明显较小。
由于支路通道狭窄,并且某些站台存在的物理干涉较多,单纯地采用柔性曲线难以满足现有的条件,结合Drawing Line Tool工具,使线段的包络线占用的空间更小,Drawing Line Tool工具相当于在无法移动的固定“障碍物”周围加了一层保护,结合优化工具进行优化,使占用空间更小,保证AGV小车可以顺利通过。图4为未使用Drawing Line Tool工具和使用Drawing Line Tool工具产生的包络线,它们的起点和终点坐标均相同。如图所示,使用Drawing Line Tool工具占用的空间明显较小。
(2)复合动作和复合任务的实现
货叉的升降和小车的行走可以单独控制,考虑到系统的效率和观赏性等因素,本项目中AGV小车在行走的过程当中调整货叉高度,边走边升货叉,边走边降货叉,经过实际的使用,效果比较明显。
在任务分配和调度方面,根据AGV小车的实际位置、是否有在执行任务、执行任务的距离和时间等因素,自动将任务分配给AGV小车。AGV完成前一作业任务之后,AGV系统会根据物流系统任务指令,自动调度AGV小车执行取空纱车任务,将空纱车运回,这样有效地提高了系统的效率。
2.信息交互
AGV小车与其它物流设备有信息交互,为保证安全生产,AGV小车在取货、卸货、取货完成、卸货完成时均会向上级系统发出请求以及完成确认信息,待上级系统给出指令后,AGV小车方可执行任务,具体流程如图5所示。
3.取消任务机制
如果上级系统下发指令有误或者人为干预,导致AGV小车接受到错误任务,可以在AGV调度系统上将该任务取消。
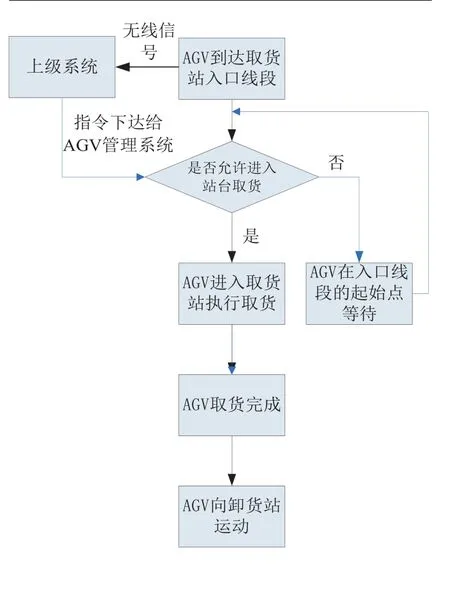
图5:AGV小车执行任务流程

图6:络纱区
4.复杂的堵塞
图6为络纱区,AGV运行空间特别狭小,取卸货站台多,容易造成AGV堵塞,为减少多车在该区域的等待时间和堵塞时间,本项目在路线设计上对系统进行了优化。
5.充电管理功能
由于本项目的生产任务比较繁琐,设置了5个充电站,AGV小车在正常的运行过程中,时刻监测电池电压,当电池电压低于程序中预先所设定的值25v时,AGV小车将会产生一个“低电量报警”信号,待AGV小车执行完当前正在执行的任务后,自动运行到充电站进行充电,待充电完成后,AGV小车可以继续执行任务。
由于考虑到现场空间有限,为了充分地利用资源,本项目的AGV数量多于充电站数量,在一些极端情况下,会有AGV小车产生“低电量报警”信号后,无法及时分配充电站的情况,本项目的解决方案为:设置了充电等待站,如果AGV小车产生“低电量报警”信号后,无法及时分配充电站,则AGV小车会先去充电等待站等待,待分配充电站后及时去充电。
6.自动门的设计
考虑到玻纤行业的特殊性以及络纱区恒温、恒湿的要求,本项目在络纱区门口设计有自动门。当AGV小车到达门口时,会通过MOXA向自动门发出开门申请信号,此时自动门上升,待自动门上升到达上到位时,向AGV小车发出通过信号,待AGV小车完全通过自动门后,自动门下降。自动门的设计充分满足了络纱区恒温、恒湿的要求。
四、总结
本项目通过对AGVS的研究和技术创新,根据项目现场的实际环境,采用合理的路线设计,更好地优化了系统的效率,有效地减少AGV小车的空跑时间和等待时间,提高了工作效率,使系统更稳定、高效地运行。
