混合运动模式下的双重阈值零速区间检测算法
2018-12-20贾铮洋吕志伟张伦东高扬骏周朋进
贾铮洋,吕志伟,张伦东,高扬骏,周朋进
(信息工程大学,郑州 450000)
行人导航技术与Wi-Fi、UWB、蓝牙等基于射频信号的室内定位技术相比自主性更高[1-4],并且可在火灾救援、矿井抢险、单兵作战等极端或未知环境下实现自主定位。
行人导航技术是在分析人运动状态的基础上结合传感器数据利用航迹推算的原理实现定位。由于在行走过程中脚部的运动特征变化明显,因此将成本低且尺寸小的微机电(Micro-Electro-Mechanical Systems,MEMS)惯性元件安置于脚部已成为当今研究的热点。目前主要存在行人航迹推算(Pedestrian Dead-Reckoning, PDR)和捷联惯导解算 (Strapdown inertial navigation system, SINS)两种行人导航算法方案。PDR算法是利用航向估计以及基于身高、步频等参数的步长估计通过航迹推算的方式得到行人位置信息。由于个体模型参数差异导致该方法存在一定的局限性。SINS捷联惯导解算方法根据惯性元件输出的数据直接计算每一次脚步变化的三维导航参数[5-6],由于MEMS器件漂移大、精度低等原因,通常采用零速修正(Zero Velocity Update, ZUPT)辅助的手段来抑制误差累积,通过周期性的误差清零进一步提高解算精度。在行走过程中,脚部与地面保持相对静止的时间是十分短暂的,因此,零速区间检测既是零速修正的核心,同样也是行人导航解算的关键环节。在进行零速区间检测时可能会出现漏判或误判。漏判是指未判断出所有的零速状态点,误判是指将非零速状态点判断为零速状态。由于无法准确判断出零速与非零速状态的分界点,所以漏判的发生是不可避免的。但是必须避免误判的发生,因为一旦发生误判,将对之后的位置解算产生较大影响。因此在进行零速区间检测时应在避免发生误判的前提下尽量减少漏判的发生。准确、有效地检测每步内的零速区间有助于提高定位精度。
目前典型的零速检测方法有:1)固定阈值法[7],通过对加速度或某种组合观测量设定阈值,满足阈值要求即检测得到零速区间,这种方法仅在单一运动模式下检测效果较好。但是对于混合运动模式,该方法的检测效果并不理想;2)外部传感器检测法[8],利用压力数据或超声波数据辅助检测得到零速区间。外部传感器需要绑在脚上或腿上,这使得穿戴更加繁琐。增加外部传感器使得数据处理量增加且成本较高。
本文在前人研究基础上提出了一种适用于混合运动模式下的双重阈值零速检测算法。经实验验证,该算法可以准确、有效地识别出正常行走、上楼和下楼等三种室内常见的运动模式,并根据运动模式匹配相应的阈值进行零速区间检测。
1 不同运动模式的步态分析
行人在室内常见的运动模式分为3种,分别是正常行走、上楼和下楼。每种运动模式都存在一定的周期性,不同的运动模式在一个周期内的步态变化差异性显著。固定于脚部的MEMS惯性测量元件可以检测出每种运动模式的周期性以及不同运动模式的差异性。结合实际运动状态每个步行周期可大致分为四个阶段:起步阶段、跨步阶段、落地阶段以及零速静止阶段。图1给出了正常行走状态下的陀螺仪变化最明显的X轴方向角速度变化趋势(X轴方向角速度指在水平面上与前进方向相垂直方向上的角速度),并大致标出了一个步行周期内的四个阶段。
虽然每种运动模式的步行周期都存在上述四个阶段,但不同的运动模式在一个周期内每个阶段的X轴方向角速度变化存在显著差异。图2分别给出了2.5 s内正常行走,上、下楼三种运动模式下X轴方向角速度的变化趋势。图2中,(a)图为正常行走状态,(b)图为上楼状态,(c)图为下楼状态。结合图1和图2可知,在三种运动模式的起步阶段,X轴方向角速度均会出现一个显著波谷(A),在跨步阶段内均会出现一个显著波峰(B);在之后的落地阶段内,正常行走状态和上楼状态的X轴方向角速度均再次出现显著波谷(C),而下楼状态的落地阶段仅存在一个拐点(C′),并未出现与正常行走和上楼状态下的显著波谷点C;波谷点C出现之后,上楼状态紧接着会再次出现一个显著波峰(D),并且下楼状态的拐点C′出现之后同样会再次出现显著波峰(D),而正常行走状态在落地阶段并未出现显著波峰点D。由此可知C点是区分下楼与正常行走、上楼两种运动模式的角速度变化特征点;D点是区分正常行走与上、下楼两种运动模式的角速度变化特征点。C点与D点依次出现是判断上楼状态的关键。

图1 步态变化特征曲线Fig.1 Curves of gait characteristics

图2 正常行走(a)、上楼(b)和下楼(c)的角速度变化特征曲线Fig.2 Angular velocity characteristic curve of normal walking (a),upstairs (b) and downstairs (c)

图3 “假走”状态示意图Fig.3 “False walking” state diagram
人在室内除了上述三种常见的运动模式之外,在静止时偶尔还存在脚部无规则的移动或晃动,这种无规则运动的周期性不明显且四个阶段无法分辨,正确的零速区间很难准确判断,因此称为“假走”状态。由于“假走”状态下的零速静止区间无法判定,所以在进行零速检测时应先剔除“假走”状态。图3为“假走”状态示意图,在开始行走之前脚部发生了一次无规则的移动。
2 零速检测算法设计
2.1 传统的固定阈值检测法
传统的固定阈值检测法主要有三种形式:加速度检测法、角速度检测法、加速度方差检测法。这里主要介绍加速度方差检测法[7]:

式中,N为窗口大小,ak是k时刻加速度,aN为窗口内加速度的均值,σ0为方差阈值。当k时刻的方差小于方差阈值时,k时刻为零速时刻,否则k时刻为非零速时刻。固定阈值检测法阈值单一,不适用于混合模式下的零速区间检测。
2.2 适用于混合运动模式下的双重阈值零速区间检测算法
在运动过程中,加速计和陀螺仪数据可以准确描述运动状态的变化。不同运动模式的行走周期内X轴方向角速度变化存在明显差异[7]。通过分析运动过程中加速度和角速度的变化趋势,结合之前学者[9-10]的研究,设计如下零速区间检测算法:
① 剔除“假走”状态。人在静止状态下,由于脚部的轻微晃动会产生“假走”状态。“假走”状态与常见的运动模式相比零速区间无法判断,因此容易产生误判,所以要在零速检测之前将其剔除。本文提出一种角速度谷值峰值检测法可以有效剔除“假走”状态。该方法的原理是通过检测每步的起步和迈步阶段进而判断该步是否为真实运动状态。

式中,A1表示真实运动状态的检测判断条件,(i)表示该在起步阶段X轴方向角速度谷值(即图2中的A点),该谷值要小于阈值。(j)表示跨步阶段X轴方向角速度峰值(即图2中的B点),该峰值大于阈值μ2。通过多次试验总结得到,一般情况下“假走”状态下 X轴方向角速度值在±100 (°)/s之内,为不影响常见运动模式的判别,将μ1和μ2分别设为-100 (°)/s和100 (°)/s。两个极值出现的时刻满足i<j。当A1=1时,则认为该步为真实运动状态,反之则为“假走”状态。
② 运动模式的识别。通过分析图1和图2可知,不同运动模式的X轴方向角速度变化差异主要体现在跨步以及落地阶段。在这两个阶段内,惯性元件的 X轴方向角速度变化的特征点(如图2中的C、C′、D点)是识别不同运动模式的关键。在步骤1)的基础上,当某一历元的角速度值大于μ2(或小于μ1)且满足大于(或小于)前后5个历元的角速度值时,则认为该历元为极值出现时刻。通过多次实验可知,利用谷值(或峰值)之间的大小关系以及固定的范围区间区分特征点会出现极值点漏判的情况。由图2可知,极值之间出现的时刻存在先后顺序,谷值峰值交替出现,且谷值最先出现,根据极值出现的先后顺序以及极值属性可准确区分识别A、B、C、D四个特征点。在进行零速区间检测之前,可以通过对这些特征点的识别进而判断出每步的运动模式,记为条件 A2。运动模式特征点识别方法如表 1所示。通过该步骤可区分出上楼、下楼以及正常行走状态,为零速区间检测的阈值匹配奠定基础。
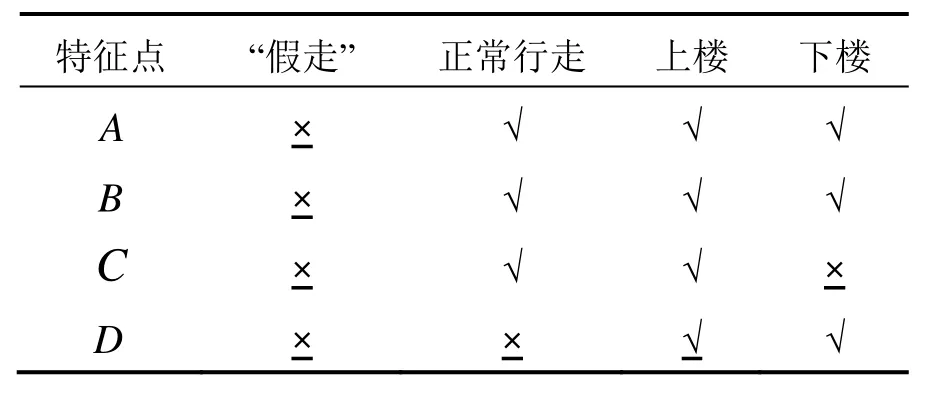
表1 运动模式特征点识别表Tab.1 Feature points of movement pattern identification
③ 自适应双重阈值+时间窗口检测法。步骤①和②已经确定了起步、跨步以及落地阶段,杜绝了误判发生在这三个阶段的可能性。在零速静止阶段,加速度和陀螺仪的输出应该稳定在一定的范围内。在进行零速区间检测之前首先通过步骤②识别出运动模式,然后根据运动模式自动匹配相应的阈值以及时间窗口的大小,最后采用加速度和角速度双重阈值并配合时间窗口的方法进行零速检测。该算法选取运动过程中变化特征较为明显的竖直方向加速度以及X轴方向角速度数据进行阈值检测。

式中,A3表示零速区间检测判断条件,Gyrx(j)表示j时刻X轴方向角速度,φx表示X轴方向角速度在零速时刻的检测阈值,分别为正常行走、上楼、下楼三种运动模式下X轴方向角速度阈值; az(j)表示 j时刻竖直方向加速度,g表示当地重力加速度,γz表示竖直方向加速度在零速时刻的检测阈值,分别为正常行走、上楼、下楼三种运动模式下竖直方向加速度阈值;T表示时间窗口的大小,TW、TU、TD分别表示三种运动模式下的时间窗口大小;不同运动模式的加速度以及角速度阈值是通过2~3步的行走后,首先通过一个合理且较为宽泛的阈值范围检测得到零速区间,比较每段零速区间中部10个历元中的观测量绝对值的大小,取最大值作为阈值界限。宽泛的阈值范围取不同人在多次训练中的零速区间内观测量绝对值的最大值。时间窗口大小通过多次实验总结得到。不同的运动模式对应不同的检测阈值以及时间窗口大小。时间窗口检测的含义是当i时刻以及该时刻之后的(i + T- 1)个时刻均满足双重阈值检测条件,则认为该时刻为零速时刻,即A3=1,反之为非零速时刻。利用双重阈值检测和时间窗口检测的目的在于尽可能地杜绝误判的产生,并在此基础上尽可能多的检测出零速区间。算法解算流程如图4所示。

图4 零速检测算法流程图Fig.4 Flow chart of zero-velocity detection algorithm
3 实验验证
实验采用MTi-G-710惯性测量模块。该元件内部包含3个正交加速计,3个陀螺仪以及1个磁传感器,加速计量程为15g±,陀螺仪量程为1000 (°)/s。MEMS惯性测量模块及安装方式如图5所示。

图5 惯性测量模块及安装示意图Fig.5 Inertial measurement module and installation diagram
在实验过程中将惯性元件安置于脚尖,Z轴竖直向上,Y轴指向前进方向,X轴与Y轴Z轴构成右手系。采样频率为100 Hz。实验在信息工程大学实验楼进行,在实验过程中对正常行走,上楼和下楼这三种运动模式进行识别并进行零速区间检测,最后依据零速检测结果进行零速修正最终解算得到定位结果。
图6为运动轨迹示意图,实验员从实验楼1楼起点处开始,首先沿实验楼东侧楼梯A开始上楼,上至5楼之后沿着走廊(5楼)自东向西行走,行走至实验楼西侧楼梯B处开始下楼,下至1楼之后沿走廊(1楼)自西向东行走至起点处。
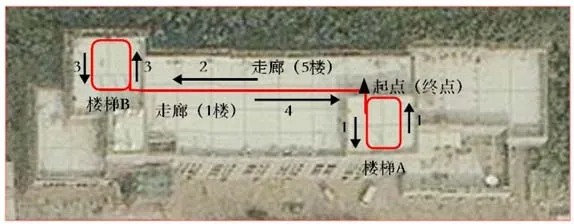
图6 轨迹示意图Fig.6 Trajectory
图7与图8分别给出了实验过程中近1分钟的上楼与下楼过程的运动模式识别效果图。真实的上楼和下楼过程均为混合运动过程。实验场地的楼层之间有两段楼梯以及一个楼梯拐角,每段楼梯上楼或下楼一般需要7步,楼梯拐角处存在2~3步正常行走状态。由图7和图8可知,经过7步上楼或下楼状态之后,运动模式发生了变化,由上楼或下楼转变为正常行走状态,经过2~3步的正常行走状态之后,再由正常行走转变为上楼或下楼状态。实验结果与上楼和下楼的实际过程相符。由此可知,通过识别X轴方向角速度变化的特征点可将正常行走步态与上、下楼步态区分开,也为每步的零速检测奠定了基础。
表2给出了三名实验员按图6中轨迹进行实验测试的运动模式识别效果。上楼状态判别成功率达到96%以上,下楼状态判别成功率达到94%以上,由于部分上楼和下楼状态会被判断为正常行走状态导致正常行走判别成功率大于100%。将不同实验员的运动模式识别准确率的平均值作为总识别成功率,可得总识别成功率为98.7%。说明该运动模式识别算法可用于识别室内常见的运动模式。
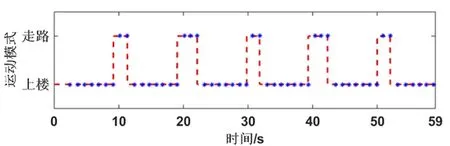
图7 上楼过程步态判别效果图Fig.7 The detection result of going upstairs process

图8 下楼过程步态判别效果图Fig.8 Detection result of going downstairs process
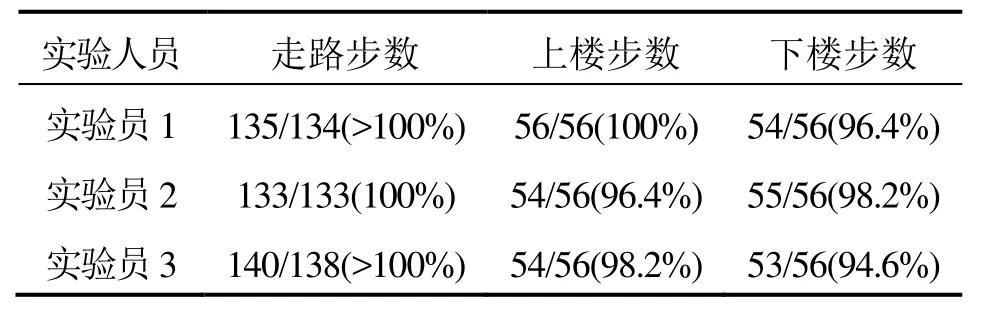
表2 运动模式识别效果表Tab.2 Motion pattern recognition effect
图9为20 s的正常行走状态下的零速检测效果图,图中横坐标为运动时间,左侧纵轴为X轴角速度;右侧纵轴为逻辑值,1代表零速时刻,0代表非零速时刻。由图9可看出,利用双重阈值+时间窗口检测算法可准确检测出每个零速区间。
图10给出了利用不同方法对20 s正常行走状态下的零速区间检测结果。图10中纵坐标为逻辑值,1、3、5代表零速时刻;2、4、6代表非零速时刻。由图10可以看出仅利用加速度阈值+时间窗口的检测方法在10 s处发生了一次误判,仅利用角速度阈值+时间窗口进行检测时,在6 s以及18 s处发生了误判,误判已经在图10中标出。单一阈值(加速度阈值或角速度阈值)+时间窗口进行检测时发生的误判的含义是该点的零速状态不能确定,所以需利用双重阈值+时间窗口检测法将两种单一阈值的检测结果进行“与”运算,这样能够尽可能地避免误判地发生。

图9 正常行走状态下的零速检测效果图Fig.9 Detection result of walking zero-velocity intervals
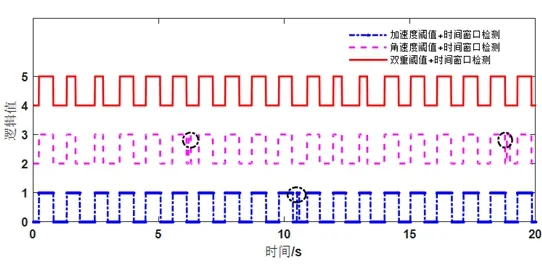
图10 不同算法在正常行走状态下的零速检测结果对比图Fig.10 Detection result of walking zero-velocity interval by different methods
结合图6中的轨迹示意图,图11给出了分别利用传统的固定阈值检测法和双重阈值配合时间窗口检测法两种方法得到的零速区间进行零速修正后得到的轨迹。轨迹全长约为208 m,利用双重阈值配合时间窗口检测法得到的轨迹闭合差为0.971 m,占轨迹全长的0.4%D;利用传统的加速度协方差检测法得到的轨迹闭合差为15.08 m,占轨迹全长的7.25%D。
结合图6和图11可知,固定阈值检测法在经过楼梯A的上楼阶段之后轨迹开始发生偏移,在经过楼梯B的下楼阶段之后,轨迹发生了较大的偏移。由此可知固定阈值零速检测算法在正常行走状态下效果较好,但利用同样的阈值对上、下楼这种混合运动模式进行零速检测的效果并不理想。而本文的零速检测算法,可根据运动模式匹配相应的阈值和时间窗口,利用双重阈值检测可有效避免误判产生并尽可能多地检测得到零速时刻,从而使得在进行零速修正后得到的定位误差较小。

图11 双重阈值+时间窗口检测算法与传统零速区间检测算法解算轨迹对比图Fig.11 Trajectory comparison between double thresholds +time window detection algorithm and the traditional zero-velocity interval detection algorithm
为了说明本文提出的混合运动模式下的双重阈值零速检测算法的普适性。不同行人利用本文算法与传统的固定阈值零速检测算法的定位精度对比如表3所示。由表3可知,通过识别运动模式匹配相应的阈值利用双重阈值配合时间窗口检测算法可以使不同行人的定位误差较小。与固定阈值检测法相比精度提升了68%以上,平均提升了70%以上。

表3 定位精度比较Tab.3 Comparison of positioning accuracy
4 结 论
本文通过分析不同运动模式下每个行走周期内的角速度变化特点,设计了一套适用于混合运动模式的双重阈值的零速区间检测算法。通过实验验证,该方法的运动模式检测成功率为98.7%。不同行人利用本文的零速检测算法结果修正误差累积后,定位精度平均提升70%以上。
