闭环光纤陀螺温度误差分段补偿方法实现
2018-12-17秦琳琳
罗 全,秦琳琳,周 全,吴 刚
(中国科学技术大学,合肥 230026)
0 引言
与传统机械陀螺仪相比,基于Sagnac效应的光纤陀螺因其全固态、长寿命、高精度等优势,在现代航空、航海等军民工业中占有愈发重要的地位[1]。然而由于构成光纤陀螺的核心部件对温度变化十分敏感[2],当环境温度变化时,将产生温度误差(Shupe效应),这是影响光纤陀螺精度的主要原因,需要对其进行补偿。改善陀螺的温度漂移,通常可以通过改进其结构、使用温控装置来降低其温度敏感性,或是建立数学模型对其进行软件补偿。在最近的研究中,出现了多种模型误差补偿方法,如神经网络(NN)、支持向量机(SVM)等[3]。这些方法对非线性误差补偿效果较好,但由于算法复杂度高、易陷入局部极小值等缺点,难以在工程实际中应用。通过建立多项式模型,利用多重线性回归估计参数仍然是补偿光纤陀螺温度误差最为有效的方法[4],具有低复杂性和易于工程应用等特点。本文通过分析温度漂移和各温度变量之间的关系,建立了多项式模型。考虑到单模型拟合的补偿效果较差,提出了多模型分段拟合的方法,实验验证了模型的有效性。工程实现中,利用陀螺系统中单片机和FPGA相结合的硬件实现方法,实时计算相关变量以确定数据段的类别,并计算补偿量。实验证明,多模型分段拟合具有较好的补偿效果。
1 实验与建模
1.1 变温实验
将某公司ZFXXX系列光纤陀螺置于HL7025P型温箱中,在室温条件下启动陀螺,待陀螺温度稳定后启动温箱,温度变化速率设置为1 ℃/min,变温过程如下:将温箱中温度降低至-40 ℃并让陀螺在此温度下工作90 min,再将温箱升温至60 ℃,让陀螺在此温度下再工作90 min[5],接着将温箱中温度降至常温,待光纤陀螺输出再次达到稳定后结束实验,陀螺和温箱设备如图1a、图1b所示。
陀螺输出釆样频率为100 Hz,温度采样周期为1 s,将原始输出数据经过100 ms平滑处理,剔除异常值得到输出的样本数据,多个周期预处理后的陀螺输出及温度曲线如图1c、图1d所示。

图1 实验设备与输出曲线Fig.1 Experimental equipment and output curve
1.2 相关性分析及建模
由光纤陀螺Shupe效应产生的原因[6]可知,温度漂移与环境温度、温度变化率及温度梯度有关。考虑到利用光纤环四极对称绕法[7],大大降低了温度梯度的影响,故本文仅对温度及温度变化率进行分析。为研究输出与各变量间的对应关系,利用皮尔逊相关系数分析陀螺输出与温度及温度变化率之间的关系,如表1所示。
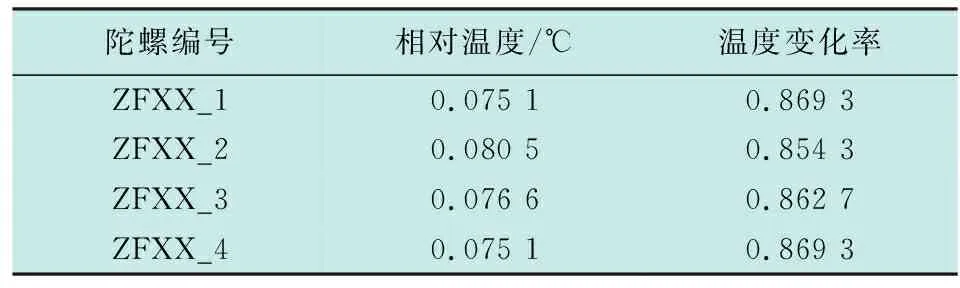
表1 皮尔逊相关系数
从表1数据可知,陀螺输出与温度变化率有很强的相关性,说明在变温过程中温度变化率的影响较大。
由温度误差效应和相关性分析,建立陀螺输出的多项式模型为[8]
(1)
式中:LD为补偿量;L0为常数项;T为相对温度;dT/dt为温度变化率;Ai和Bi为多项式系数;ε为随机误差;i和j为最高阶次。
为确定各变量的阶次,依次改变i和j的值,比较不同阶次下的补偿效果。而Ai和Bi可通过多重线性回归进行估计[9]。其中,单模型在温度一阶、温度变化率三阶条件下的拟合结果如图2所示。

图2 单模型拟合结果Fig.2 Single model fitting results
由图2可以看出,单模型拟合的效果并不理想,在温度变化较快时并不能很好地跟随零偏误差的变化,因此提出了多模型分段建模策略。
1.3 分段建模策略
光纤陀螺的温度误差在不同的温度条件下(温度近似平稳与剧烈震荡,变温速率快与慢)的变化规律不同。仅使用同一套模型参数进行补偿容易产生局部偏差较大的问题,使模型的适用性变差[10]。根据光纤陀螺输出数据特征,提出多模型分段拟合的方法进行补偿。
分段判据如表2所示,根据温度、温度变化率以及温度变化率差分的大小所对应的变温特点将数据段分成9段。其中,r为温度平稳时的最大变温速率,T0为初始时刻温度。

表2 分段策略
将多模型分段拟合与单模型拟合进行比较,一次实验中残差曲线如图3所示。

图3 分段拟合和单模型拟合残差曲线
多次实验分段拟合和单模型拟合残差大小如表3所示。

表3 单模型拟合与分段拟合残差标准差比较
从图3和表3可以看出,相比单模型拟合,使用分段拟合方法更能有效地补偿光纤陀螺零偏温度误差,是单模型拟合补偿效果的2~3倍。
2 温度补偿实现
工程实际中,温度补偿的硬件选用单片机和FPGA 相结合[11],利用单片机采集光纤环温度,基于模型计算出补偿量,送给FPGA,FPGA输出补偿后的陀螺数据。在线补偿时,在单片机中进行数值计算,根据分段策略对当前数据进行分类,并由相应段的模型参数计算出补偿量。由于单片机与 FPGA 的时钟频率不同,FPGA 接收到完整的补偿数据后锁存补偿数据,每1 s读取补偿量进行补偿计算,并输出温度和补偿后的数据。图4为系统框图。

图4 系统框图Fig.4 Block diagram of the system
为服务于陀螺生产实际,开发了数据采集软件和数据仿真软件。其中:数据采集软件主要用于原始数据的采集、保存、实时显示等;数据仿真软件主要用于数据预处理、分段建模、补偿效果仿真等。
3 适应性验证
为了进一步验证模型的有效性,需要进行模型适应性验证。分别针对全温、常温自启动和任意变温3种变温条件进行补偿结果分析[12]。全温:温度变化范围为-40~60 ℃,变温速率为1 ℃/min,一次实验的补偿效果如图5a所示。常温自启动:将陀螺放置在温箱中,设置温箱温度保持常温不变,启动陀螺,分析其启动过程补偿效果,一次实验的补偿效果如图5b所示。任意变温:温度范围为-40~60 ℃,任意设置温箱的变温速率,分析其补偿效果,一次实验的补偿效果如图5c所示。



图5 3种变温条件补偿结果验证Fig.5 Compensation results in three kinds of variable temperature conditions
分别对全温、常温自启动以及任意变温3种变温条件进行多次实验,补偿前后残差标准差对比记录见表4。

表4 分段拟合残差标准差
由表4可以看出,无论是在全温、常温自启动还是任意变温下,利用分段补偿方法都可以取得较好的补偿效果,证明了模型具有一定的适应性。在全温条件下,补偿后的陀螺误差比补偿前降低了一个数量级。
4 结束语
本文分析了光纤陀螺温度漂移与各温度变量之间的相关性,建立了多项式模型,并在单模型拟合的基础上提出了多模型分段拟合方法,实验证明了分段拟合比单模型拟合具有更好的补偿效果。工程实现中,利用单片机和FPGA交互实现了分段方法,并进行了全温、常温自启动、任意变温的多次实验验证。实验结果表明,利用多模型分段方法可以有效地减小光纤陀螺的温度误差,证明了该方法的有效性和可靠性,对工程实际具有重要的指导意义。
