动态无线能量传输系统中的通信网络
2018-12-17牛金涛段善旭张晓明
牛金涛,蔡 涛,段善旭,丰 昊,张晓明
(华中科技大学电气与电子工程学院强电磁工程与新技术国家重点实验室,武汉430074)
无线能量传输WPT(wireless power transmission)技术具有安全、可靠、便捷等特点,在交通运输、材料处理、医疗场合、小型便携式电子产品及室外照明[1-7]等领域被广泛应用。随着国际能源危机的不断加剧,电动汽车EV(electric vehicle)的发展越来越受到国际市场的关注。为解决EV领域由于电池容量不足导致的续航问题,WPT技术不断发展。
相较内燃机,EV有其无法比拟的污染小、噪音低、能效高等优点。在EV领域,WPT技术分为静态(驻车)无线能量传输SWPT(static wireless power transmission)和动态(行车)无线能量传输DWPT(dynamic wireless power transmission)。作为SWPT的补充与延伸,EV的DWPT充电系统通过在行驶道路上铺设供电线圈链,为行驶中的EV不间断地提供电能,从而有效延长行驶里程,并进一步降低车载储能容量。文献[8]指出,道路无线能量传输技术能够有效减小EV电池损耗,延长电池寿命,减小车辆体积,进而减小工程造价,同时减小甚至可能消除EV发展中的距离限制难题。根据原边线圈布局方式,DWPT系统可以分为长导轨式[9-10]和分段式[11-14]两类,其中,后者具有可控灵活、线缆使用率低和EV副边线圈约束性小等特点,得到了越来越多的关注。在分段接力式DWPT系统中,由于线圈布局分散,常采用电源分区域驱动多个发射线圈的供电方案。系统通过检测车辆的位置信息决定线圈的投入与切出。另一方面,基于原边电源的分布式组成架构,电源之间必须通过快速可靠的通讯系统实时共享车辆的位置信息,实现供电链的正常切换。因此,电动汽车副边线圈位置信息的判断及车源、源源间的信息交互对系统的稳定高效运行至关重要。此外,随着V2G(vehicle to grid)技术的发展,EV中电池管理系统BMS(battery management system)的建立,及其充电系统与电网的交互过程,对车载通讯系统的需求越发迫切。
为此,本文就DWPT系统中的原边布局及其通信问题进行相关研究及探讨。
1 DWPT系统通信需求分析
不同的DWPT系统布置结构对通信方式的要求各异。原副边线圈的相对移动变化使原副边的通信不能采用传统的有线通信;原边不同的结构布置和系统的不同功能的实现,对原边的通信方式要求各有所异,例如远程BMS控制系统及远程监控的V2G管理系统,此时需要选择能够进行及时、高速、稳定的远程通信方式。文献[14-15]对动态无线能量传输系统中的数据通信提出了类似的要求。
1.1 源源通信
源源通信是指在DPWT系统中的原边变换器之间的通信。实现原边信息共享的通信方式有:传统的串口通信、高速以太网通信及CAN网络通信。传统的串口通信方法简单,可直接由硬件电路完成,硬件成本低,接口规范。但是串口通信存在插拔危险(实物插拔过程中,两端必须有一端设备断电,否则可能烧坏设备),极易受电磁干扰的影响等问题,不能进行总线自动仲裁,数据通信传输效率低,不能满足实时通信控制的要求;以太网通信技术具有通信速率高(在互联网设备间能够以10~100 Mbps的速率进行信息包的传输),通信标准统一规范,便于接入,但硬件设计较复杂;CAN总线通信协议是专门用于车载网络通信而产生,其采用差分电平进行通信的设计思想、较强的抗干扰能力和高可靠性已使其成为了汽车领域中进行数据通信的首选技术[16-17]。文献[14]中提出:DWPT通信需求的核心要求是低延时、低抖动性及高可靠性。考虑到无线充电系统中原边系统的布置方式、电磁辐射的干扰、电池厂家一般提供CAN总线控制接口、系统实现的难易程度及建设成本,本文中原边源源通信网络采用CAN总线通信进行搭建。
1.2 车源通信
DWPT系统中的车源(系统原副边)通信由于通信体相对位置的变化,必须采用无线的方式进行通信;另外,由于DWPT系统周围存在的磁场环境会对通信造成干扰,故所选通信方式应该具有一定的抗干扰和数据容错能力,且通信方式应该要求简单,配置方便。现在应用在WPT系统中的无线通信技术有蓝牙技术[17]、Wi-Fi技术、ZigBee、nRF24L01 等高频通信方式。蓝牙通信具有低功耗、通信安全性好、组网简单的优势,但蓝牙通信距离有限;Wi-Fi技术发展迅速,且支持多设备同时在线,但Wi-Fi技术中的设备识别及传输稳定性问题还有待解决;ZigBee网络通信具有成本低廉和网络容量大的特点,同时这也显露了其缺点:通信距离短(10~80 m),数据传输速率低;而nRF24L01无线通信不属于其上任何一种,其是Nordic公司研发的一款2.4 G通信芯片,具有一整套属于自己的通信协议,其模块可以随时设置收发模式,通信条件简单,可实现单对单及单对多的通信,配置简单。本文系统中采用nRF24L01无线通信模块进行原副边的数据通信组网,以便系统中原副边数据的及时通信和后续V2G、BMS系统的建立。
DWPT领域的研究中,为了接入智能电网,便于智能微网管理,未来的V2V(vehicle to vehicle)和V2I(vehicle to infrastructure)技术中对通信方式的要求会更加苛刻:即在保证稳定、可靠、及时的基础上,还应具有隐私加密等功能,能切实保护用户的相关信息。
2 DWPT系统通信组网结构分析
2.1 DWPT系统原边系统布局方式
DWPT系统的监控方案中,选取何种监控模式需与系统中的原边线圈布置方式实现统一。DWPT系统中原边线圈分布方式包括轨道式和分段式布置,其中导轨式方案中不存在多个线圈布局的情况,本文仅对分段式DWPT系统进行分析。文献[6]对原边单源分段式和导轨式配置做了描述,其布局方式如图1所示,原边线圈和电源变换H桥的匹配组合有:单源轨道式、单源分段式和多源分段式。
图1(a)为单源导轨式布置,系统中需要铺设较长的导轨线缆供副边线圈(电动汽车)接收电能,工程造价较高;图1(b)为单源单源分段式布置方案,虽能够减少线缆的使用,减少系统漏感损失,提高整个系统的功率传输效率,但单源系统的故障处理能力较弱;图1(c)为多源分段式布置方案,该方案结合前述两种方案,既减小了工程造价,又提高了系统的故障处理能力,能够做到故障电源随时切断处理及随用随加。原边布局方式的选择与后文的通信组网结构密切相关,在进行原边布局的同时,必须考虑到DWPT系统中通信网络对布局方式的要求,即:通信通道明确,便于搭建;能均衡各控制器的通信负担等。故本文系统原边采用多源分段式布局。
2.2 DWPT系统原边通信组网结构
随着WPT技术在道路交通中的应用发展,DPWT越来越获得研究学者的青睐。另外,DWPT系统与电网的交互(V2G)技术及DWPT系统与电动汽车中BMS的交互变得必不可少,现就如何选择一种合适的原边通信组网结构进行分析。
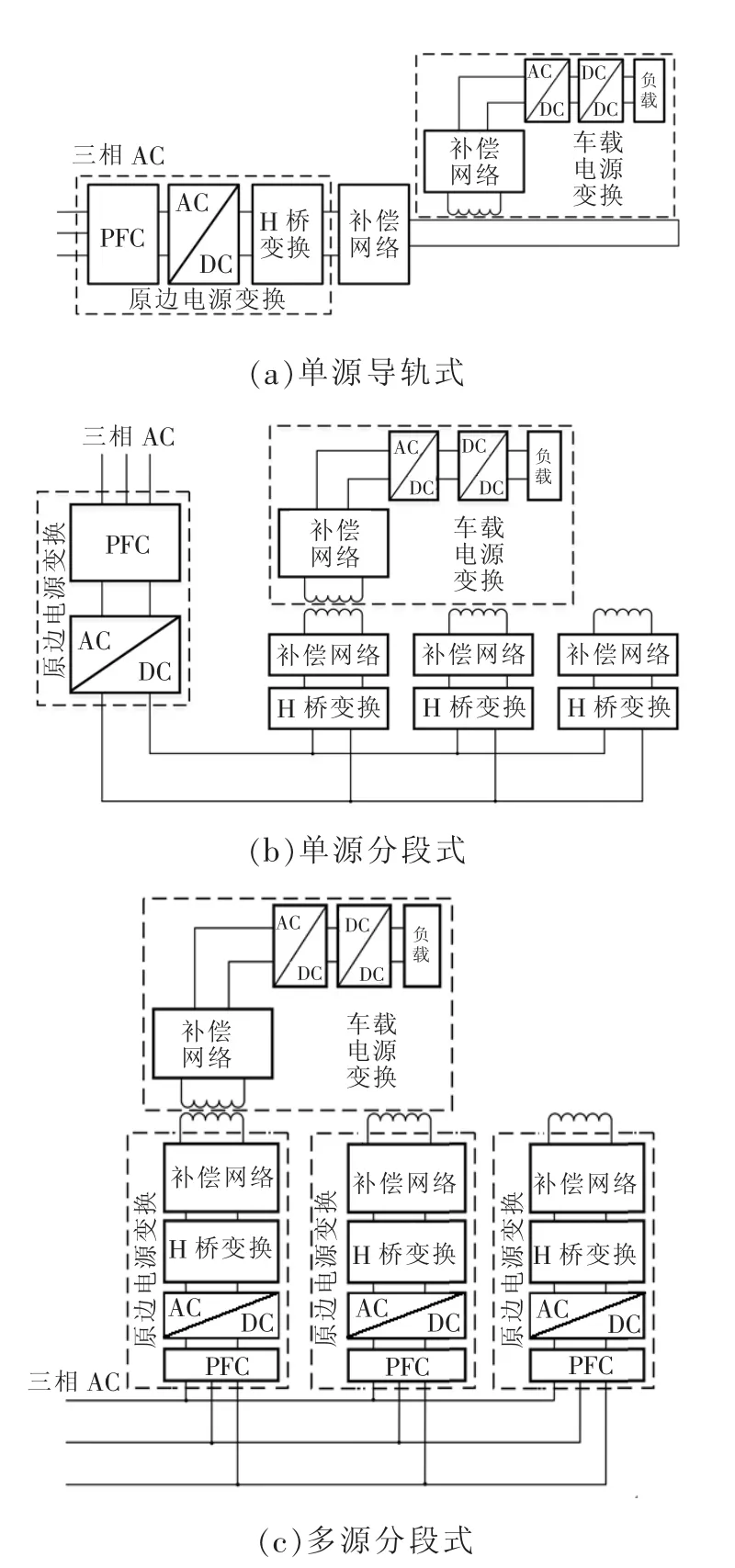
图1 DWPT系统原边布局方式Fig.1 Primary layout of DWPT system
从上述介绍可知:单源导轨式和单源分段式布局结构在搭建过程中需要铺设很长的电缆,这无疑增加了系统的建设成本,阻碍了技术的应用历程[18-19]。所以,多源分段式布局结构得到了很快地发展,这是因为该结构直接从就近三相供电网取电,节约了电缆费用,并且一旦某个部位出现问题,可直接进行脱网管理。根据多源分段式布局中源的分布,为了对待充电汽车位置信息进行共享,做到对原边供能线圈的实时切入、保证充电效果、避免能量损耗,可从如图2所示几种通信组网形式中选择建立原边通信网络。
图2分别给出了总线型结构、环状结构、星型结构和网状结构,图中双箭头表示信息通信传输通道,图2(d)中由于通信通道过多,省去了双箭头绘制,表1列出了图2中各通信结构的优缺点。考虑到DWPT系统中多源分布式控制架构,本文原边通信组网采用环状结构。

图2 原边通信组网结构Fig.2 Primary communication network architecture
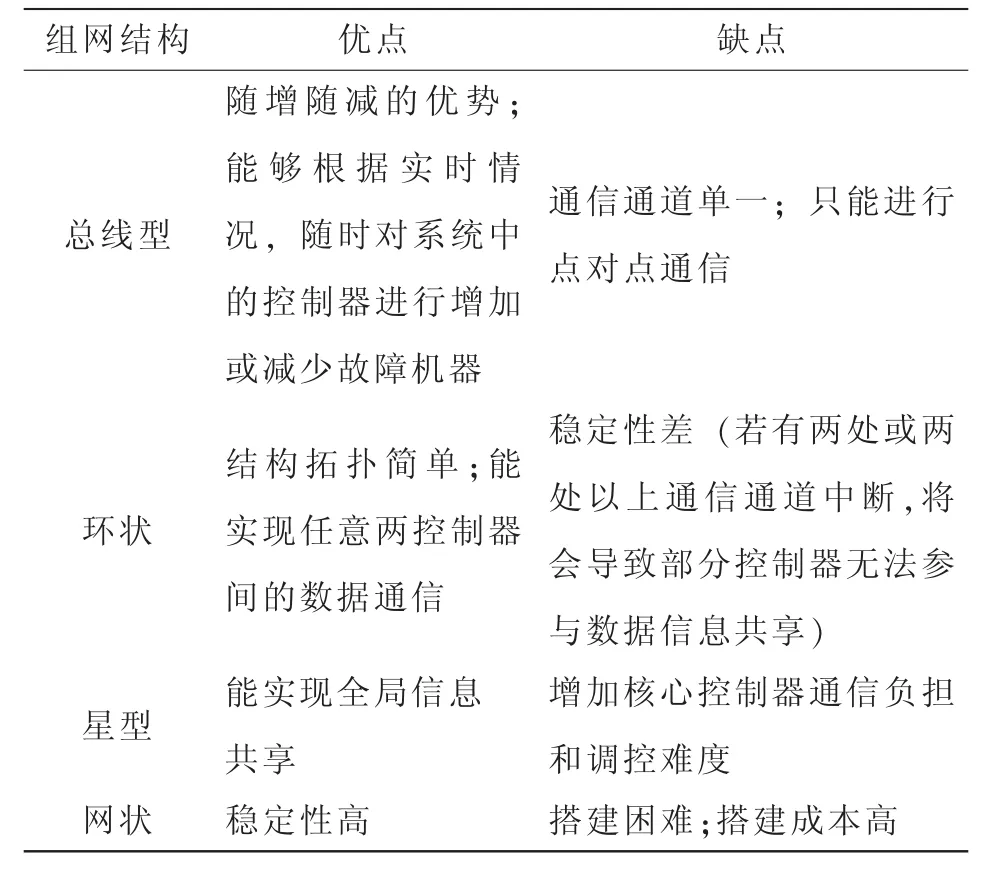
表1 各种通信组网结构的优缺点Tab.1 Advantages and disadvantages of different communication network architectures
3 系统设计
3.1 系统中的数据通信网络
搭建数据通信网络,实现网络中数据的共享机制。在文献[21]提出的中继接力控制策略基础上,本文的数据通信的建立采用控制器TMS320F28335中的CAN模块与无线通信模块nRF24L01结合搭建。系统中的数据通信如图3所示,通过CAN总线,源控制器之间建立起通信网络,交换线圈投切状态和线圈电流。车载电路安装nRF24L01无线通信模块,与源控制器之间进行通信,传递电动汽车接收电路输出端电压电流(即充电电压电流)信息。最后,选择其中一个源控制器作为主控制器,将系统所有采集数据通过串口传输至上位机,实时显示动态无线充电平台的运行状态。
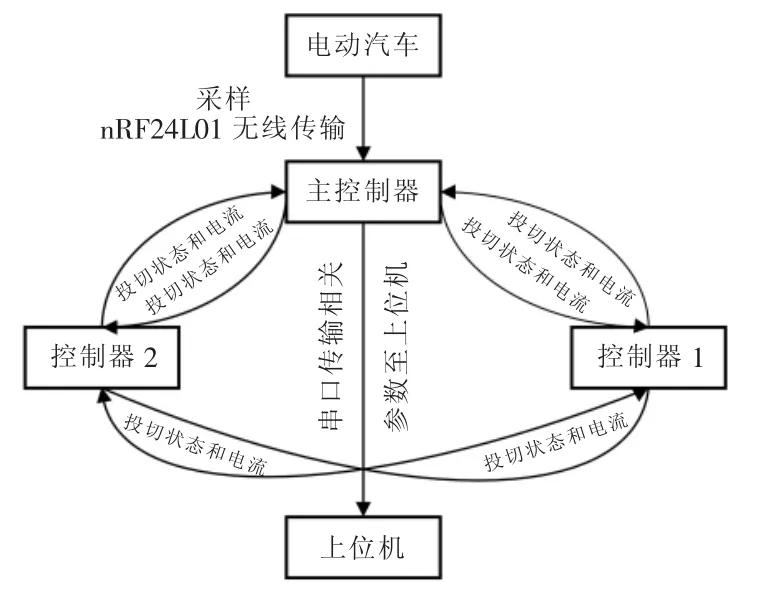
图3 系统的数据通信网络Fig.3 Data communication network in the system
系统架构如图4所示,采用分布式的控制结构,减少了系统所需使用的控制器,减小系统搭建成本及控制复杂度。

图4 系统架构Fig.4 System architecture
3.2 中继接力控制策略
如图5所示为中继接力控制策略程序流程。在定时器中断中,原边控制器通过读取原边电流采样值之后开始准备向CAN总线发送数据,接着进入文献[20]的投切控制模式;CAN接收中断主要对接收数据的数据ID进行判断,然后各个控制器接收相应的信息并选择是否存储数据。
CAN邮箱接收到消息后,进入中断;通过判断中断矢量进入不同类型的中断,接收相应的中断后,复位邮箱中的RMP标志位,同时复位中断标志;之后根据接收到的信息对系统中其他原边线圈的供电现状进行判断,决定是否控制线圈退出供电模式。
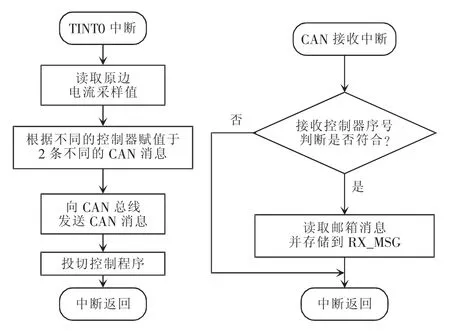
图5 中继接力控制策略程序流程Fig.5 Flow chart of relay control strategy
3.3 数据通信CAN网络中的数据位定义
CAN网络中传输数据分为两种:一种是各个控制器之间传输的数据,另外一种是主控制器与上位机之间传输的数据。每种传输消息均包括:邮箱地址,邮箱号和传输数据。传输数据为8个字节,其数据格式分别定义如下。
(1)原边控制器之间的数据传输,其CAN数据位定义如表2所示。
(2)原边主控制器与上位机之间的数据传输,其CAN数据位定义如表3所示。
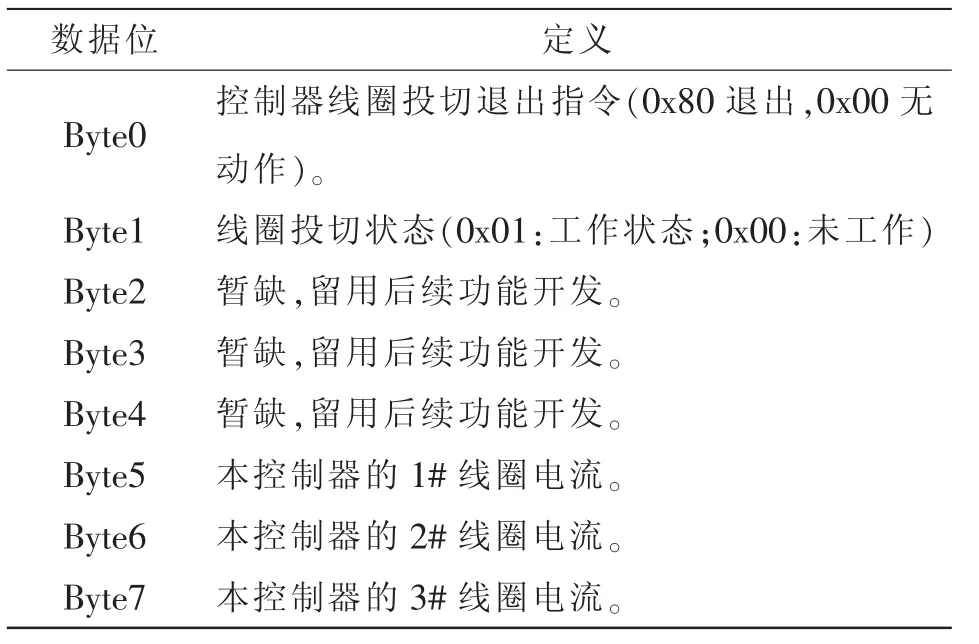
表2 原边控制器之间的CAN数据位定义Tab.2 CAN data definition between primary controllers
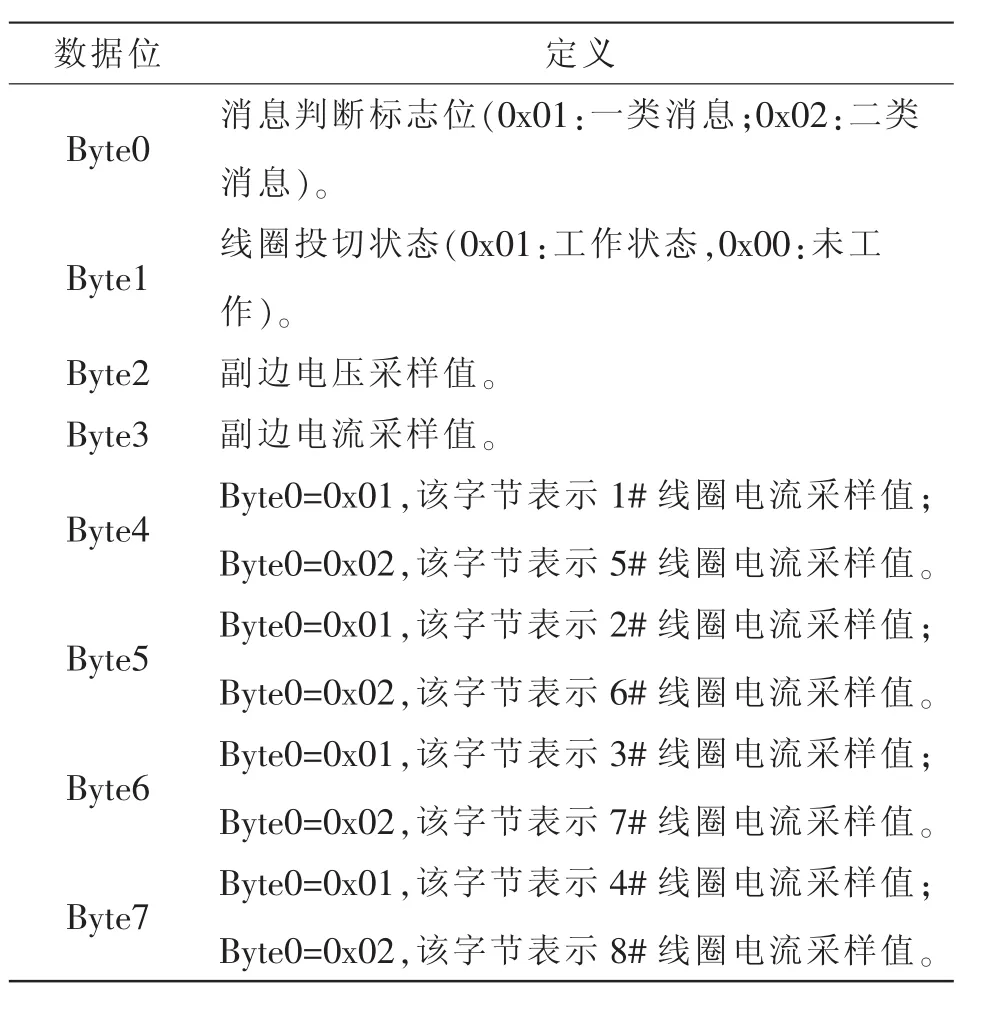
表3 原边主控制器与上位机之间的CAN数据位定义Tab.3 CAN data definition between primary master controller and host computer
4 实验验证
搭建系统平台中的数据通信网络如图6所示。系统原副边接收线圈如图7所示,原边线圈链由8个线圈组成。首先检测原边控制器之间及主控制器与上位机的通信状态,抗干扰前后系统通信网络实验测试波形如图8所示。图8(a)是原边控制器之间及主控制器和上位机之间进行CAN通信时的CAN信号波形,从图中可以看出CAN网络通信波形完好,通信正常;如图8(b)所示,为采取抗干扰措施之后的CAN网络数据传输波形,从中可以看出,数据波形质量得到明显提升。与图8(a)相比,极大程度上减小了数据传输中的干扰量。此外,通过更换普通的数据通信线为双绞线,也可增强CAN通信中的抗干扰问题,双绞线中的外包屏蔽层可以对系统周围环境中的磁场起到一定的屏蔽作用。图9展示了通过CAN转USB模块在上位机对主控制器的监控数据截图,图中A、B、C、D 4个部分分别代表上位机监控到的接收消息的邮箱ID、消息帧类型(扩展帧)及数据位长度、数据位中的消息标志位和数据位区。
CAN总线网络中的网络端末匹配电阻对提高CAN网传输稳定性起着至关重要的作用,为了增加CAN网络的抗干扰能力,设置合适的端末匹配电阻,使整个数据通信网络的稳定性得到提高,通过测试,最终确定本系统中的匹配电阻为105.5 Ω。
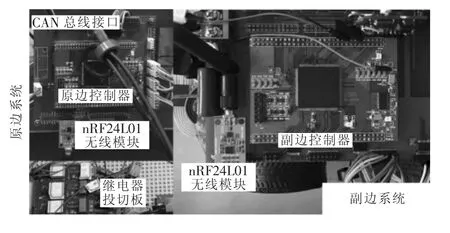
图6 平台数据通信网络Fig.6 Data communication network of the platform
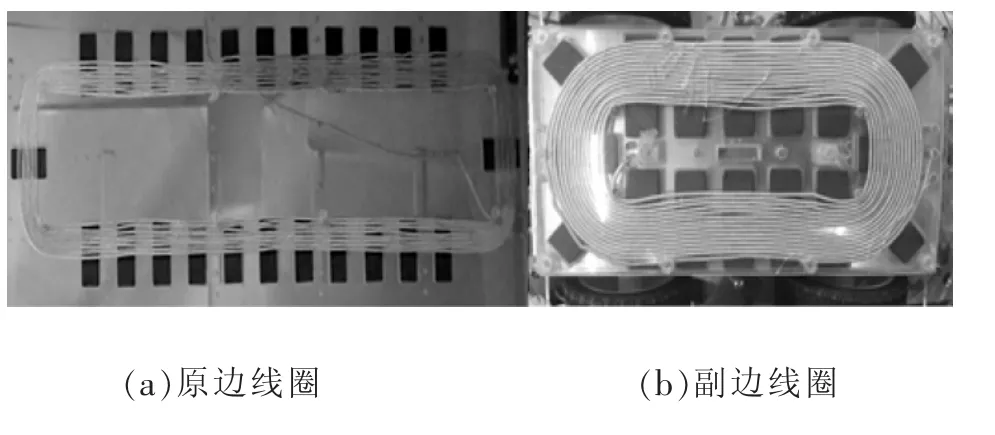
图7 系统原副边线圈Fig.7 Primary and secondary coils in the system
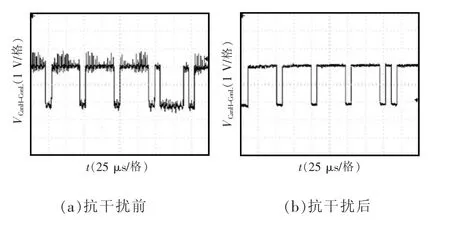
图8 系统工作中的CAN网络数据实验波形Fig.8 Experimental waveforms of CAN data while the system is in operation
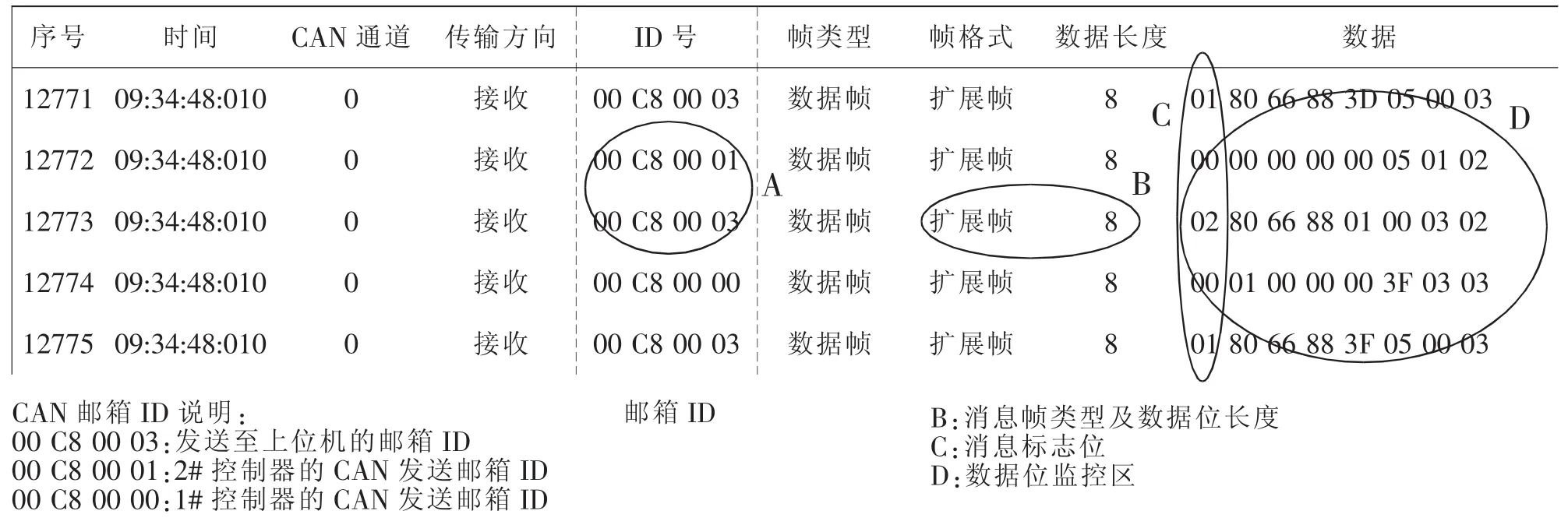
图9 系统工作时CAN转USB模块中的上位机检测数据Fig.9 Data received by the host computer through the CAN-to-USB module when the system is in operation
为了进一步提高传输稳定性,对CAN通信进行改进设计,如图10所示。在CAN线上面添加磁珠设计,把CAN网络端末的匹配电阻设计成2个分裂电阻,2个分裂电阻之间并加对地电容。
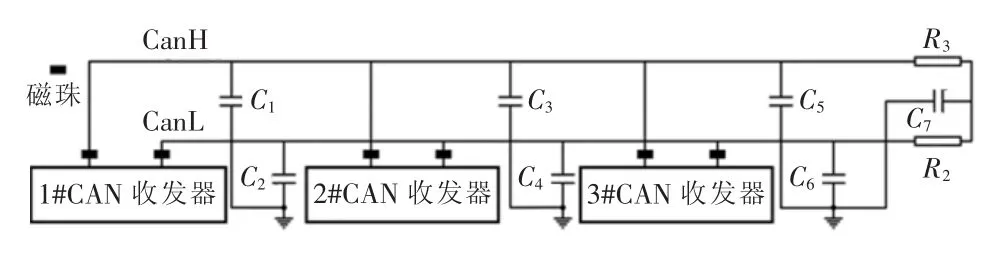
图10 CAN网络抗干扰电路设计Fig.10 Circuit design of CAN network antijamming
保证通信网络正常的情况下对系统的充电效果进行测试。图11是副边移动小车绕环形跑道行进一周过程中,小车经过各个原边线圈时的副边线圈的接收电压Uo和充电电流Ibat波形。从图中可看出,充电电流波形存在8个平稳峰值平台。这说明当小车从1#线圈开始依次驶过8个发射线圈上方时,系统能够进行正常投切充电,正常传输电能,给车载电池充电。实现了动态无线能量传输演示平台的数据通信网络建立及分段线圈的投切控制,能够保证有序高效的供电过程。
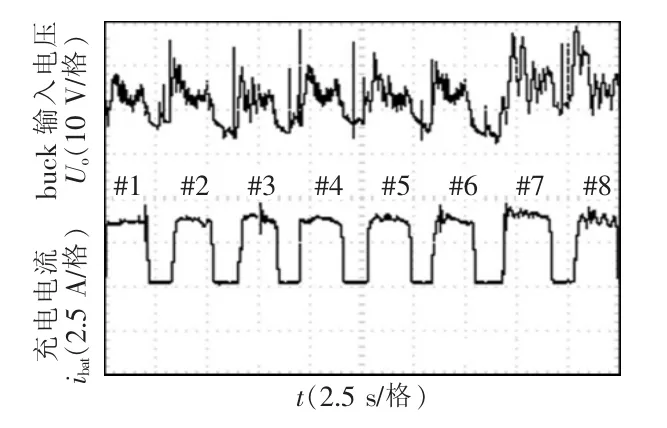
图11 动态演示平台线圈接收电压和充电电流波形Fig.11 Waveforms of receiving voltage and charging current on the dynamic demonstration platform
5 结语
通过对DWPT系统中车源及源源通信需求分析,本文引入了CAN网络通信和nRF24L01无线通信模块,构建了DWPT系统通信网络,并在搭建的实验平台上进行了测试。测试表明,CAN网络通信能够及时共享DWPT系统中的相关信息,保证源荷的及时投切,确保有序高效的供电过程。后期研究将从系统中的磁场干扰方面着手,进一步增加通信网络的抗干扰能力及其在系统中承担的通信任务优化,并将其推向电动汽车无线充电的实际应用。
