基于深度神经网络的空中目标作战意图识别
2018-11-30周旺旺姚佩阳张杰勇王勋魏帅
周旺旺,姚佩阳,,张杰勇,王勋,魏帅
1. 空军工程大学 信息与导航学院,西安 710077 2. 中国人民解放军95910部队,酒泉 735000
敌方目标作战意图识别是目前态势估计领域研究的热点,是我方指挥员指挥决策的重要依据。信息化条件下,现代战场的复杂性、瞬变性剧增,指挥员难以在短时间内处理大量的战场信息,识别敌方目标作战意图,这就迫切需求作战指挥系统辅助指挥员进行决策,以缩短决策时间,提升决策质量。空中作战目标是现代战争中的典型作战平台,是夺取制空权的重要力量。对空中目标作战意图及时、准确的识别为我方指挥员防空作战指挥提供有力支撑。现有的作战意图识别研究主要基于模板匹配[1-3]、专家系统[4-6]、贝叶斯网络[7-9]和神经网络[10-13]等方法对目标的意图进行判断。文献[1-3]依据领域专家的军事知识构建模板库,从敌方目标作战行动中提取特征,通过推理特征与模板库的匹配程度确定目标作战意图。文献[4-6]依据领域专家的作战知识构建知识库,并用规则的形式表示战场态势和作战意图的对应关系,最后依据所得战场态势用推理机推理作战意图。文献[7-9]依据领域专家知识构建贝叶斯网络,利用节点表示特征,有向弧表示转移关系,条件概率表达关系强度,能够较好地表达特征与意图之间的关系。上述方法虽在一定程度上解决了目标作战意图识别问题,但均需要大量领域专家先验知识对意图识别特征权重、先验概率等进行量化,而由于战场环境复杂性的不断增强,新作战平台和作战样式的不断涌现,领域专家较难在短时间掌握目标的全面信息,其先验知识不足以对目标属性与作战意图间的关系进行精确量化。针对以上问题,文献[10-12]利用神经网络自适应和自学习的能力,自动从训练特征数据中提取识别规则,并将识别规则记忆在网络权值中以便后期意图预测。这些基于神经网络的方法可以在领域专家先验知识不足情况下较好地解决目标意图识别问题,但由于隐藏层数较浅,难以表达复杂度高的问题。文献[13]提出了一种基于栈式自编码器的意图识别深度学习模型,将战场环境信息、目标属性和目标实时状态信息作为输入,识别作战意图。该方法能有效识别目标作战意图,但模型输入包含多个时刻目标状态信息,在模型训练时会产生累积误差,影响识别效果。上述方法均采用基本的反向传播(Back Propagation, BP)算法对网络进行训练,收敛速度较慢,且容易陷入局部最优。
本文针对领域专家知识不足条件下,难以量化属性特征与作战意图间的映射关系问题,提出了一种采用深度神经网络对空中目标进行意图识别的方法,通过将空中作战目标的机动类型、速度、高度、位置等属性特征与对应的意图标签作为样本输入到深度神经网络模型中,调整网络节点权值,然后用训练好的模型预测目标的作战意图。深度神经网络是多隐藏层的神经网络,由于隐藏层数较深,后面层网络可以在前面层网络学习到的初步特征基础上形成更高级别的特征[14],因此能够对目标意图进行更好的识别。目标状态的改变是由于发生了机动,以目标机动类型作为模型输入,既能降低样本维数,减少累积误差,又能保留目标运动信息。本文采用ReLU(Rectified Linear Unit)函数[15]作为激活函数解决梯度消失问题,同时结合自适应矩估计(Adaptive moment estimation,Adam)[16]优化算法加速模型收敛,跳出局部最优,可以得到更好的训练模型。采用深度神经网络方法可以更好地解决领域专家知识不足条件下的目标意图识别问题。
1 作战意图特征选取
本文研究的是空中目标的作战意图识别过程。敌方的作战意图由所配置的兵力合力实现,敌方兵力会按一定的规则采取作战行动去实现其作战意图,敌方作战行动表现为目标自身状态的改变。因此我方通过对其状态的观测识别其行动,进一步识别其作战意图,意图层次表示及推理过程如图1所示。
图1 意图的层次表示及推理过程Fig.1 Hierarchical representation and reasoning process of intention
目标作战意图的不同会表现为某些状态的区别,意图与状态间存在某些特定关系。本文依据领域专家知识选取了与目标作战意图关系紧密的特征,如飞行速度、高度、航向角、方位角、距离、飞行加速度、雷达反射面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答和机动类型共12维特征。作战意图分为突防、攻击、电子干扰、运输、加油、民航飞行、预警探测和侦察等8类。本文列举了目标飞行速度、高度、雷达状态等3种特征与作战意图间的对应关系:
1) 目标飞行速度与作战意图
歼击机在空战格斗时通常采用大速度接敌,飞行速度一般为735~1 470 km/h;轰炸机和运输机飞行速度一般为600~850 km/h;运输机通常采用巡航速度执行运输任务,巡航速度一般小于其最大飞行速度;预警机飞行速度为750~950 km/h。
2) 目标飞行高度与作战意图
突防一般分为低空突防和高空突防,对应高度分别为50~200 m和10 000~11 000 m;空战格斗一般在1 000~6 000 m高空进行;为躲避雷达探测,侦察机一般采用低空和超高空侦察,对应高度为100~1 000 m和15 000 m以上。表1为目标高度与目标作战意图对应关系。
3) 目标雷达状态与作战意图
民航飞机一般不装备对空和对海雷达;轰炸机一般装备两款雷达,但只在轰炸攻击时保持对空或对海雷达开机;执行侦察任务的飞机一般保持两款雷达同时开机;空战格斗时对空雷达通常开机;执行运输任务时雷达一般静默。
目标作战意图的显现是一个动态的时序过程,仅依赖某一时刻目标的状态预测其作战意图可能导致预测结果的片面性,本文将连续10个雷达取样点的目标状态进行封装,识别其机动类型。将得到的目标机动类型及最后时刻目标飞行速度、高度、航向角、方位角、距离、飞行加速度作为目标机动特征。由于目标状态的连续性,以最后时刻目标状态及目标机动类型作为模型输入即可保留较为完备的目标运动信息。表2为目标机动类型与目标作战意图之间的关系,表中未列出直飞、左转弯、右转弯3种所有作战意图都适用的机动类型。

表1 目标高度与目标作战意图的关系

表2 目标机动类型与目标作战意图的关系
2 样本数据处理
神经网络模型只能处理数值数据,雷达等传感器获取的目标飞行速度、高度、航向角、方位角、距离、飞行加速度、雷达反射面积等机动数据为数值数据,但不同类别数据间量级差别较大;电子侦查设备获取的目标对空雷达状态、对海雷达状态、干扰状态、敌我识别应答结果及意图类型、机动类型均为分类数据。为满足模型对数据的要求,消除量纲影响,需对样本数据和意图标签进行处理。
2.1 归一化处理

(1)
式中:minAx为第x种属性Ax的最小值;maxAx为属性Ax的最大值。
2.2 数值化处理

(2)
生成作战意图标签的方法主要有以下2种:① 由前线作战人员反馈其观测到的敌方目标作战意图,后方人员依据反馈结果确定样本数据对应的意图标签;② 由领域专家通过对目标实现其作战意图过程的持续跟踪观察确定敌方目标作战意图。随着战场环境复杂性的不断增强,新作战平台和作战样式的不断涌现,领域专家较难在短时间掌握目标的全面信息,导致其先验知识不足以根据目标的机动和状态数据直接推断目标作战意图,但其能够通过对目标实现作战意图过程的持续跟踪观测,对目标作战意图定性,得到样本数据对应的作战意图标签。如当敌我双方正进行空战格斗时,领域专家能够依据获取的敌方目标空战过程的视频、图像等信息确定敌方目标作战意图为攻击。意图识别结果为分类数据,同样需对其进行数值化处理,作战意图与模型输出对应关系如图2所示。

图2 作战意图与模型输出的对应关系Fig.2 Correspondence between combat intention and model output
3 作战意图识别模型构建
神经网络可以在无先验知识条件下,仅通过网络自身的训练,自动学习输入与输出之间的映射关系。因此,在领域专家先验知识不足的条件下,通过获取到的敌方目标数据和意图标签对神经网络进行训练,得到作战意图识别神经网络,然后用训练好的网络对目标意图进行识别。
对于多隐藏层的神经网络,后面层网络可以在前面层网络学习到的初步特征基础上形成更高级别的特征[14],因此可以更好地刻画数据特征,同时,相对于单隐藏层、多节点的神经网络可以用较少的参数表征相同复杂度的函数。基本的BP神经网络随着网络复杂度的提高,其越容易陷入局部极值,导致网络无法得到很好的训练。深度学习是机器学习中的一个分支,其目标是建立能够模拟人脑进行分析、学习的神经网络,现已广泛应用于图像识别[17-18]、语音识别[19-20]、行为识别[21-22]等领域。本文基于深度神经网络模型对目标作战意图识别问题进行研究。
3.1 ReLU激活函数

激活函数ReLU的表达式为σ(z)=max(0,z),即当z≥0时保持不变;当z<0时为0,其求导简单;当z≥0时,导数为1;当z<0时,导数为0。因此不会随着递推的进行发生梯度衰减,可以解决部分梯度消失问题。
3.2 基于Adam算法的模型训练过程
传统的梯度下降方法的学习率η保持不变,且随着损失函数复杂度的提高,越容易陷入“鞍点”,即所有方向上梯度值为零。而Adam算法结合了Momentum优化算法和RMSprop(Root Mean Square prop)优化算法的优点,当梯度在连续朝同一个方向更新时会增大权重变化量,当梯度更新方向变化时会减小权重变化量,如同石头下落过程中的惯性一样,利用这个“惯性”,避免网络训练时陷入局部最优点,加速网络收敛。同时,Adam算法可以让参数自适应地更新学习率,更新频率高的参数学习率较小,更新频率低的参数学习率较大,可以提高梯度优化算法的鲁棒性。
(3)
式中:gt为对于参数θ在迭代次数t时目标函数的梯度;参数θ指代网络中所有参数。
(4)
式中:mt为梯度的一阶力矩;vt为梯度的二阶力矩。通过计算偏差修正一阶和二阶力矩估计来减少偏差
(5)
式中:β1、β2为超参数,用于修正一阶和二阶力矩估计。
Adam算法的参数更新公式为
(6)
式中:ε为平滑项,防止被零除。
4 目标作战意图识别流程
基于深度神经网络模型对目标作战意图进行识别,步骤为:
步骤1从各类传感器中提取目标特征数据,并根据实际作战结果和领域专家判断对其标记意图标签。利用获取的目标特征数据和意图标签构建数据库,将数据库中数据抽取一部分作为测试数据库,其他部分作为训练数据库,从训练数据库中随机抽取部分数据作为验证数据库。
步骤2调整网络结构,确定隐藏层数和节点数。
步骤3将训练数据库中所有数据输入到构建好的深度神经网络中,调整网络权值,将输出的意图识别结果与标签对比,计算识别精度,若识别精度达到模型既定标准则转步骤4,否则转步骤2。
步骤4将验证数据库中的数据输入到训练好的深度神经网络中,计算识别精度,若识别精度达到模型既定标准则转步骤5,否则转步骤2。
步骤5将测试数据库中的目标特征数据输入到训练好的深度神经网络中,计算识别精度,判定模型识别效果。
步骤6将待识别作战意图的目标特征数据输入模型,预测出其作战意图。
5 仿真实验分析
实验采用作战意图数据集Data,数据集Data为不同空中目标作战意图对应特征状态量测值,包含飞行速度、高度、航向角、方位角、距离、飞行加速度、雷达反射面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答和机动动作共12维特征数据,分为8种作战意图,数据占比情况为突防13.6%、攻击22.7%、电子干扰9.1%、运输13.6%、加油4.5%、民航飞行13.6%、预警探测9.1%、侦察13.6%,样本规模为8 000。分别随机抽取90%数据构成训练数据库,剩余10%构成测试数据库。实验迭代步长均为10 000,神经网络学习率η=0.01,超参数β1=0.9,β2=0.999,平滑项ε=10-8。
5.1 模型结构确定实验
不同网络结构的深度神经网络识别效果不同,因此需确定深度神经网络模型隐藏层层数和节点数。模型输入层、输出层节点数分别设定为数据维数和分类数。虽然模型效果是由测试数据来评判的,但在实验中不能利用测试数据来调整模型结构。使用测试数据来调整网络结构可能会导致模型过拟合,失去对未知数据的判别能力。本文从训练数据库中随机抽取10%建立验证数据库,用验证数据库评判模型的效果,调整模型结构。图3为Data数据集在不同网络结构下识别效果对比图,识别率均为数据集整体识别率。
由图3可知,验证数据集与测试数据集的曲线趋势基本一致,因此可以用验证数据集来判断模型的好坏,调整模型结构。由图3(c)可见,隐藏层数为4层,节点数依次为10、20、20、10时模型识别准确度较高,确定其为深度神经网络模型的结构。

图3 4种不同网络结构下验证数据库和测试数据库的识别率对比Fig.3 Comparison of recognition rate of verification database and test database under four different network structures
5.2 模型可靠性验证实验
为验证所提模型的可靠性,分8次从数据库中抽取90%的数据构成训练样本,剩余10%的数据构成测试样本,将训练样本输入到模型调整节点参数,用测试样本判断模型识别效果。图4为
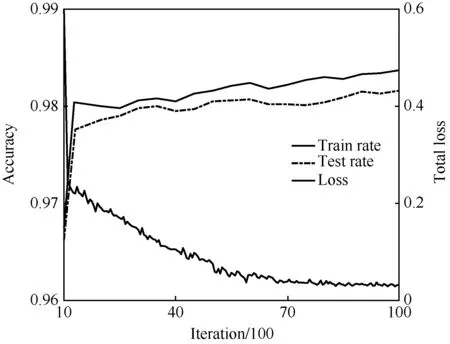
图4 训练识别率、测试识别率和损失值变化曲线Fig.4 Curves of training recognition rate, test recognition rate and loss value
不同迭代次数下模型的识别效果图,表3为8个不同数据库下模型识别效果对比。
通过8次相同规模、不同训练样本的识别结果可以看出,深度神经网络模型在不同训练样本条件下可以有效地识别空中目标作战意图,平均识别率达0.981 7,验证了所提模型的可靠性。

表3 不同数据库模型识别效果对比
5.3 模型准确性验证实验
为验证所提模型的准确性,实验中对比基于单层BP神经网络模型、深度BP (Deep BP, DBP)神经网络模型和Adam+Sigmiod深度神经网络模型、文献[13]所提栈式自编码器(Stacked Auto-Ecoder, SAE)模型和Adam+RuLU深度神经网络模型的识别效果,如图5和图6所示。
由图5和图6可知,Adam+RuLU深度神经网络模型在Data数据集上能得到更好的识别效果。对比图5所示的5种模型对空中目标作战意图识别准确率变化曲线可以看出,SAE模型收敛速度更快,在迭代1 200次左右即收敛,但Adam+RuLU深度神经网络模型较其他4种模型识别准确率更高。
图5 5种模型识别效果对比图Fig.5 Comparison of recognition effects of five models
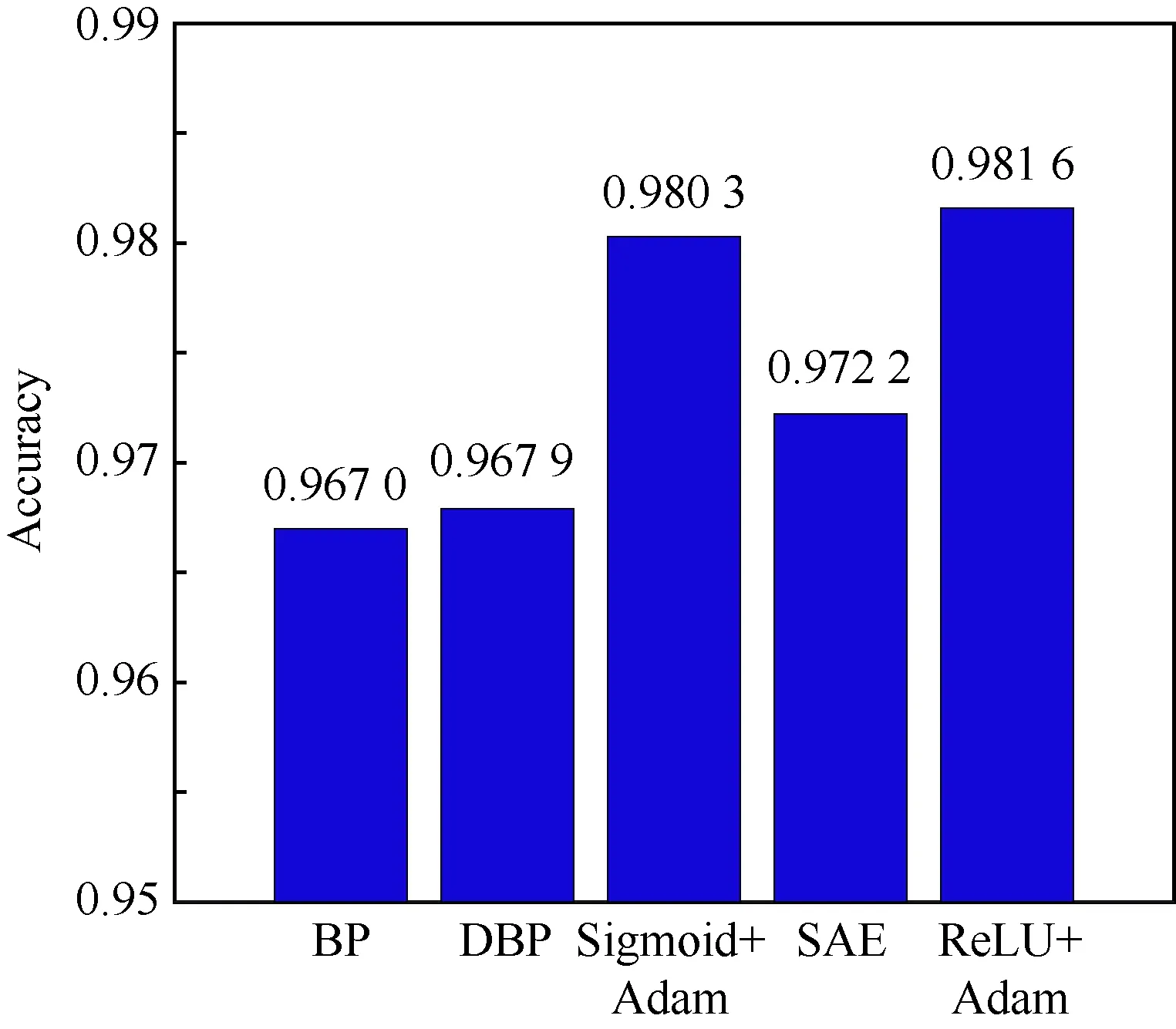
图6 不同模型识别效果对比Fig.6 Comparison of recognition effects of different models
6 结 论
1) 本文分析了作战意图识别问题特点,采用监督学习的方法解决领域专家知识不足条件下的作战意图识别问题。
2) 设计了一种基于深度神经网络的空中目标作战意图识别模型,利用ReLU函数和Adam算法优化模型,提高了模型识别效果。
3) 深度神经网络模型能够对空中目标作战意图进行识别,有着良好的可靠性和准确性;对比实验结果显示,该模型收敛速度更快且识别效果更好。