基于MSK的敌我识别及遥测信号解调方法研究
2018-11-29宋大伟尚斌斌窦法旺
陈 韵,刘 建,宋大伟,尚斌斌,窦法旺
(中国航天科工集团8511研究所,江苏 南京210007)
0 引言
当今某些特殊用途的通信设备采用脉冲式的MSK调制技术,如敌我识别(IFF)与无人机遥测信号等。例如北约对原有的Mark XII敌我识别系统进行了升级,在此基础上增加了Mode5询问应答模式[1]。Mode5询问与应答信号均由同步脉冲、旁瓣抑制脉冲和数据脉冲组成,脉冲宽度均为1μs,其中同步脉冲间隔由加密机决定,数据脉冲采用MSK调制,其中包含16个码片,也即调制速率高达16 Mbit/s。又如美军在Link4和Link11基础上发展起来的Link16战术数据链,采用的也是MSK调制体制[2],在单个6.4μs的脉冲时间长度中调制了32位码片,速率高达5Mbit/s。
因此,对于此类基于猝发窄脉冲式MSK调制体制的敌我识别或无人机遥测信号进行数据解调,存在较大的困难。因为猝发窄脉冲式MSK调制体制不能采用传统的相干解调的方法来进行处理,其信号持续时间较短,很难在短时间内建立载波与码元的同步来进行解调。因此本文提出一种基于相位差分的方法对猝发窄脉冲MSK进行解调,在无需先验信息的前提下实现敌我识别及无人机遥测信号的调制信息提取,具有良好的应用前景,对于未来战争中开展制信息权斗争具有十分重要的意义。
1 MSK调制原理
最小频移键控(MSK)调制体制是在频移键控(FSK)的基础上发展而来的,是一种包络恒定、相位连续的FSK调制信号,其信号没有相位突变,解决了因码元之间相位不连续而造成的信号包络起伏与带外泄漏造成的对相邻信道信号的干扰[3],也被称为连续相位频移键控(CPFSK)。在一个码元周期内信号包含1/4载波周期的整数倍,在码元转换时刻,相位连续无跳变,以载波相位为基准的信号相位在一个码元周期内准确的变化π/2[4]。可以用公式表示 MSK调制信号如下:

式中,ωc为载波频率,TS为码元周期,αk为输入码元,αk=±1。相位函数对时间求导数,结合码元αk的取值,可得MSK调制的两个频率f1、f2为:

从中可得调制频率之差Δf为1/2TS,进一步可得调制指数为h=Δf/fS=0.5。φk为码元的初始相位,为了保证码元转换时刻保持相位连续性,可得相位约束条件为:

式中,k为任意整数。
通过对式(1)进行进一步展开,可得MSK调制信号的另一种表达形式:

观察(4)式可以发现,MSK调制可以用正交调制加以实现,令Ik=cosφk,Qk=akcosφk,则其同项分量与正交分量可以表示为:

式(5)说明MSK正交调制形式,其调制原理框图如图1所示。
打底层为了避免熔池在正面焊缝产生坠瘤,坡口两侧熔合良好,焊接过程中焊条向坡口根部用力送进,并在坡口两侧稍许停留,以保证背面的穿透和坡口两侧的熔合性。由于焊条电弧焊时焊条的电阻大、焊条易发红,后半部分焊条的使用性能较差,所以在焊接过程中应留有稍长的焊条头,以5cm为宜,避免出现焊条沾粘、保护不良等焊接缺陷。
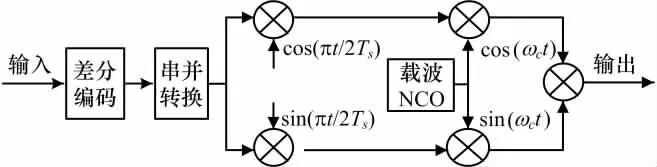
图1 MSK调制原理框图
通过调制原理框图可以看出MSK调制方法为,输入码元信号首先经过差分编码,得到新的基带码元信号,然后经过码元的串并转换分成I、Q两路信号,且两者之间相差一个码元周期。cos(πt/(2TS))、sin(πt/(2TS))可以看作为对基带码元进行加窗处理,因此I、Q两路的基带码元经过窗函数之后再进行频谱搬移从而完成了调制过程。
2 传统MSK体制解调
在通信技术领域,调制解调分为相干解调与非相干解调两类。相干解调需要事先知道发射信号载频的频点,对于某些调制信号(如BPSK或QPSK),可以直接从接收的连续中频信号中提取载波信号。虽然对于MSK信号也可以采取costas环锁定载波,但是对于窄脉冲形式的MSK信号则无能为力了。因为一般载波提取过程本身是一个负反馈过程,需要一定的环路跟踪与锁定的时间,而脉冲式的MSK信号无法为其提供有效的信号持续时间。非相干解调因其无需事先知道载波频率,从而适合于脉冲形式的MSK信号解调,主要的非相干解调方法如下:
1)模拟鉴频法[5]。模拟鉴频法利用滤波器在过渡带近似线性的倾斜幅频特性,使得调制的f1和f2频率分量经过滤波器后获得不同的增益,再经过包络检波之后恢复出调制码元信息。这种方法主要采用模拟信号处理手段,利用滤波器的物理特性对MSK信号进行解调。由于受到通信速率与滤波器特性设计的限制,同时由于数字处理手段的进步,这种方法应用变得越来越少。
2)带通滤波法[6]。带通滤波法采用2个通带中心为f1和f2的滤波器,分别滤出MSK信号的2个频率成分,2路信号再经过数字包络检波器恢复出包络,最后再经过抽样判决恢复出码元信息。数字检波利用数控振荡器(NCO)产生的本地f1和f2载波,与接收信号相乘经带通滤波后实现。这种方法可以适用于频偏较小且码速率较低的MSK调制信号,对于频偏与码速率呈线性关系的MSK调制信号则难以适应。
3)差分检波法[4]。差分检波法首先将接收 MSK信号经过带通滤波器滤除带外干扰并进行限幅放大,将所得信号分为2个支路;1个支路延迟一个码元时间并相移π/2后,与另一支路信号相乘,通过低通滤波器滤除高频分量后进行抽样判决恢复出码元信息。该种方法整个解调过程无需事先知道载波频率,因而适用于窄脉冲MSK调制信号解调。但是这种方法仍需获得码元速率等先验信息,对于非合作类MSK调制信号的解调存在一定的困难。
3 基于相位差分的窄脉冲MSK解调
对于截获的MSK调制信号,可以将表达式写为:

式中,A是信号幅度,w(t)是噪声,一般建模成均值为零、方差为σ2的高斯白噪声。经过数字化采样与量化,可以得到MSK调制信号的瞬时相位为:

从式(7)可以看出,为了得到一个不随时间变化的相位分量,可以采用相位差分的方法,唯一对其产生影响的就是噪声使得相位分量产生相位模糊,同时每个码元的初始相位值φk会对相位产生相位模糊。因此,式(7)可以改写为差分相位的形式为:

式中,PN(w)表示的是由噪声产生的相位影响,式(8)反映出这样一个事实,MSK调制信号通过相位差分算法之后,得到以载波频率为中心,以四分之一采样率为偏移的两个值,这个两个值的变化规律即能够反映出调制的基带信号αk的变化规律,只是这个结果受到噪声相位的影响,会产生相位的模糊。
为了进一步减小噪声对相位差分造成的影响,可采用文献[7]介绍的相位加权函数来抑制相位模糊。定义相位加权函数为:

这样可以得到相位差ω0的估计值为:

从式(10)可以看出,相位加权函数可以认为是一个关于n=N/2-1的对称滑动窗函数,通过对相位差低通滤波得到方差更小的基带调制信息的估计,其估计方差为:

这个结果与Cramer-Rao界是一致的[8]。
4 算法仿真与实验
4.1 敌我识别信号仿真验证
北约为了应对原有的敌我识别模式Mark XIIA体制简单,一旦被敌方截获,容易产生欺骗式干扰,于是对Mark XIIA进行升级,新增Mode5来防止信号被敌方“复制”。Mode5包含Level1~Level4 4级工作模式,其中Level3和Level4的具体技术规范尚未定义[9]。Mode5采用了应答随机延迟技术来降低信号被截获的概率;同时采用同步脉冲间隔参差技术,提高了信号被欺骗干扰的难度,总的来说,Mark XIIA Mode5是一种稳健的、具备抗截获能力的敌我识别信号,因此对其展开识别解调研究具有重要的意义。本文侧重与对Mode5的MSK体制进行解调研究,默认对其均加以有效识别,具体识别研究另有研究阐述。
Mode5消息格式分为询问与应答格式,而应答格式又包含Level1应答格式与Level2应答格式。其中询问格式如图2所示,由4个同步脉冲(P1、P2、P3、P4)、2个旁瓣抑制脉冲(L1、L2)和11个数据脉冲(D1~D11)组成,脉冲宽度为1μs,调制方式为MSK,调制码速率为16Mbit/s。同时4个同步脉冲之间间隔为S1、S2、S3,由加密机提供的8bit数据产生,用于抗截获与复制。
Level1应答信号格式如图3(a)所示,由2个同步脉冲(P1、P2)和一个数据长脉冲组成,长脉冲由9个字符组成(D1~D9),每个脉冲时间长度均为1μs,MSK调制体制,调制码速率为16Mbit/s。
Level2应答信号格式如图3(b)所示,由4个同步脉冲(P1、P2、P3、P4)和一个数据长脉冲组成,长脉冲由33个字符组成(D1~D33),每个脉冲时间长度均为1μs,MSK调制体制,调制码速率为16Mbit/s。应答信号的同步脉冲之间存在随机抖动间隔,间隔时间长度由加密机控制。

图2 Mode 5询问信号格式
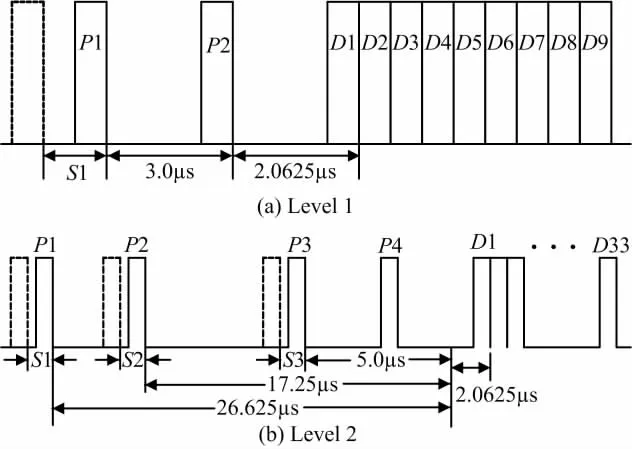
图3 Mode 5应答信号格式
针对Mode 5的消息格式以及MSK调制体制的特点,在正确识别敌我识别信号的前提下,开始对Mode 5信号解调。首先对识别的Mode5信号进行包络提取,对获得的脉冲包络信号进行过门限检测,产生Mode5消息的视频脉冲信号,根据视频脉冲信号对原Mode5信号进行脉冲截取,截取后的信号可认为是普通的MSK调制信号。由于这样的MSK信号持续时间很短(1μs),载波预测环路无法获得MSK的调制参数,难以用传统的MSK解调方法进行解调,因此,采用相位差分法对MSK窄脉冲解调,解调结果如图4所示。其中,图4(a)为在信噪比SNR=5dB条件下截获的Mode5询问信号,图4(b)为提取的包络信号,图4(c)为根据包络信号对 MSK窄脉冲进行解调,图4(d)为同步脉冲P2解调的细节结果。可以看出,通过相位差分法对MSK窄脉冲解调,有效地获取了调制的基带信息。
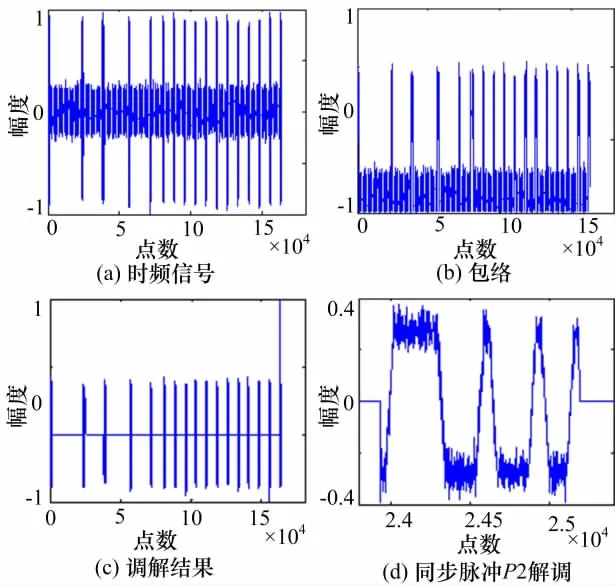
图4 Mode 5询问信号解调处理结果(SNR=5dB)
4.2 无人机遥控链路解调试验
无人机因其价格低廉、使用方便、任务载荷丰富、零人员损失而在军事和经济领域应用广泛。尤其是在民用方面,大量小型、简单、廉价的无人机在低空不受监管的飞行,给国民经济尤其是国家安全造成一定的隐患。从无人机的测控链路入手,对测控数据进行识别解调,进而按照协议规则进行调制发射,是控制非法进入敏感空域小型无人机的有效手段。
对市售某款小型无人机的遥控信号分析可知,其信号调制体制为MSK调制,信号形式为脉冲形式,脉冲宽度约为400μs,脉冲间隔为6.6ms,相邻脉冲之间频率出现周期性跳变,跳变范围为5720~5850MHz。通过自研数据采集设备采集无人机遥控信号形式如图5所示,其中图5(a)为遥控信号整体结构,图5(b)为其中单个脉冲遥控信号。
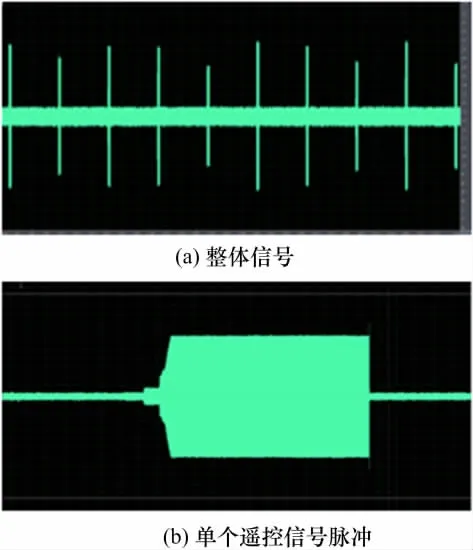
图5 某型无人机遥控信号
脉冲式MSK调制信号,结合脉冲间频率跳变,使得传统的MSK体制解调方法不再适用。信号有无的快速切换,对载波频率估计有着较高的要求,这对于脉冲式MSK解调来说是一个难点。通过采用相位差分法解调,无需获取遥控信号的先验参数信息,从而快速、有效的对无人机遥控链路进行解调。图6显示了对采集到的无人机遥控信号解调处理的结果,其中图6(a)是截获的单个 MSK遥控信号,图6(b)为差分解调结果。表1显示了对每一个MSK调制脉冲解调的数据十六进制表示形式,可以从中对遥控的数据结构进行分析,进而实现在数据层级的无人机遥控信号的欺骗。
5 结束语
本文采用相位差分的方法,实现了对窄脉冲式MSK调制信号的解调。相位差分MSK解调方法是一种非相干解调方法,不需要对MSK信号进行先验参数测量,就能获得良好的解调效果。结合敌我识别信号Mark XIIA Mode5的消息格式和某型无人机遥控信号的特征,对其进行解调仿真实验研究,结果表明该方法简单、高效,可实现与较低信噪比条件的MSK信号解调。■
