多通道SAR-GMTI虚假运动目标成像特性分析
2018-11-29张静克戚宗锋曾勇虎汪连栋
张静克,汪 亚,戚宗锋,曾勇虎,汪连栋
(电子信息系统复杂电磁环境效应国家重点实验室,河南 洛阳410073)
0 引言
合成孔径雷达地面动目标指示(SAR-GMTI)可实现热点区域的动目标检测、定位以及聚焦成像[1-4],是对SAR获取信息能力的有力增强,特别是其在最近几次高技术局部战争中发挥了显著的作用,已成为当前不可或缺的侦察手段之一,受到了各国的强烈关注和大力发展。相应地,对SAR-GMTI干扰也成为雷达对抗领域的研究热点。
对SAR-GMTI干扰可分为压制干扰和欺骗干扰。压制干扰是通过产生压制斑块或条带,使得动目标湮灭在干扰内,降低其检测概率[5-10]。欺骗干扰是产生与真实运动目标具有类似散射特性和运动特性的虚假运动目标,使得雷达难以辨别检测到的目标的真伪。由于具备强迷惑性和低识别率,欺骗干扰一直都是SAR-GMTI干扰研究中的热点,目前多集中在虚假动目标生成方法方面[11-16],研究如何利用单个干扰机生成能够模拟真实运动目标回波特性的干扰信号,以期在SAR图像生成具有特定运动特性的虚假目标,而在评价干扰是否有效时往往只关注杂波抑制后干扰是否能被检测为动目标,而关于虚假动目标的速度以及定位特性是否与真实目标匹配或吻合的研究鲜见报道。实际上,多通道SAR-GMTI具备测速和定位能力[17-20],因此有必要研究单干扰机生成的虚假运动目标在多通道SAR-GMTI中的速度和定位特性,论证其对SAR-GMTI干扰的有效性。
针对上述问题,本文以三通道SAR-GMTI系统为例,分析单干扰机生成的虚假运动目标的估计速度信息以及定位特性。首先建立三通道虚假运动目标信号模型,然后利用三通道对消干涉处理分析其速度和定位特性,最后利用仿真实验进行验证。
1 单干扰机生成的虚假运动目标三通道信号模型
如图1所示,正侧视三通道SAR-GMTI系统为干扰对象,3个子天线l、m、r以间距d等间隔分布,平台运动速度为Va。工作时子天线m发射信号,3个子天线同时接收信号。以干扰机所处位置为坐标原点,平行于雷达运动方向为X轴建立如图1所示的笛卡尔坐标系。子天线m 在慢时间η=0时刻位于(0,-RJ),即干扰机到雷达的最小斜距为RJ。假定干扰机在(xT,yT)处生成一个虚假运动目标,其径向和方位向速度分量分别为vr和vx,散射系数为σ(xT,yT),xT实际上为虚假目标与干扰机之间的方位向间隔。为了表述方便,令RT=RJ+yT表示虚假目标到雷达的最小斜距。
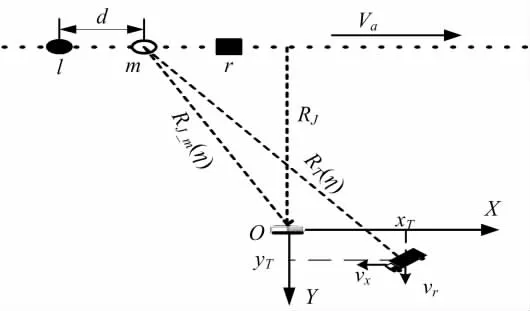
图1 三通道SAR-GMTI干扰场景几何关系图
由图1可知干扰机到各子天线的瞬时斜距为:
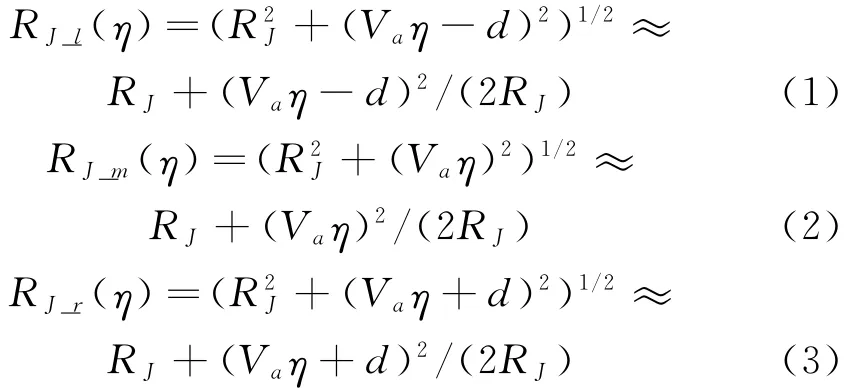
如果(xT,yT)处有一个真实运动目标,其径向和方位向速度分量分别为vr和vx,则目标到发射子天线的瞬时斜距为:

进一步可得真实目标到发射子天线与干扰机到发射子天线的斜距差为:

根据SAR欺骗干扰原理,生成一个虚假目标,干扰机需对截获的雷达信号进行相应的时延和幅度调制来生成干扰信号。由式(5)可知干扰机的延迟量应为2ΔR(η)/c,则各子天线接收到的干扰信号的双程距离历程分别为:
假定SAR-GMTI系统的发射信号S(τ),则各子天线接收到的干扰信号可表示为:

式中,i∈l,m,r{},τ为快时间,为卷积运算。
2 单干扰机生成的虚假运动目标的速度和定位特性
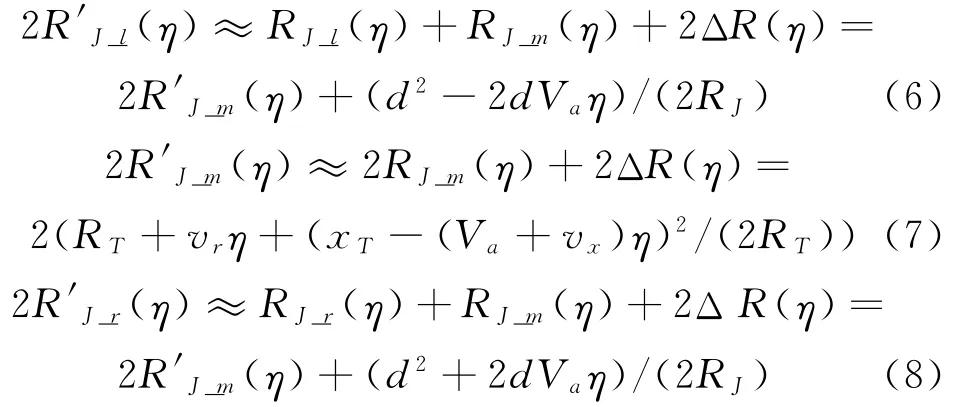
三通道对消干涉处理是一种成熟的动目标检测与定位 方 法[3,18-20],被 广 泛 应 用 于 AN/APY-7、AN/APG-76以及RadarSAT-2等多个SAR-GMTI系统,因此本节利用三通道对消干涉处理来分析单干扰机生成的虚假运动目标的速度和定位特性。该方法结合了DPCA和ATI的优点,其处理流程图如图2所示。
由于子天线间的固有间隔会在子天线图像间存在方位向位置偏差,降低杂波对消效果,因此需要在杂波对消前消除该偏差,既可在方位向匹配滤波前通过相位补偿消除,也可在图像域通过配准来消除。本节利用相位补偿的方法,子天线l和r的补偿因子分别为exp( - j(2πdVaη)/(λRT)) 和exp(j(2πdVaη)/(λRT))。 经过去载频、距离向压缩后、距离迁徙校正、方位向相位补偿以及方位向压缩后,可得各子天线的图像为:

图2 三通道干涉对消处理流程图
式中,A(τ,η)表示假目标方位向速度对成像结果的影响,如散焦与模糊等,但是并不影响假目标的峰值位置,Ba为多普勒带宽。
根据三通道对消干涉处理原理,杂波对消之前,需补偿子天线间隔d引入的相位偏差,其中天线l和r的补偿因子分别为exp(j(πd(d+2Vaη))/(λRT))和exp(j(πd(d-2Vaη))/(λRT)),然后相邻天线图像相减实现杂波和静止目标的对消,即为:
对式(12)和式(13)取幅度可得:

由式(11)可知虚假目标峰值点为η=(xT/Va)-(vrRT/),对消后幅度与|sin((2πd)/(λRT)(xT-(vrRT)/))|成正比,当其不为零时,则被检测为动目标。特别地,虚假静止目标幅度与|sin((2πdxT)/(λRT))|成正比,当xT≠ (kλRT)/(2d)(k∈Ζ)时,虚假静止目标则会被检测为动目标。
将式(12)和式(13)共轭相乘可得:

通常以虚假目标峰值处的干涉相位为虚假目标的干涉相位,则虚假目标的干涉相位为:

式中,k为缠绕周期数。
由动目标SAR成像特性可知,真实运动目标的径向速度vr与干涉相位ΔφT和方位向位置偏移Δx的关 系 分 别 为 ΔφT=- (2πdvr)/(λVa)和 Δx =-(vrRT)/Va。 对比可、发现,真实运动目标的干涉相位仅与径向速度有关,而虚假目标的干涉相位由设定径向速度和方位向位置共同决定。将式(16)带入ΔφT和Δx可得虚假运动目标的估计径向速度和方位向位置偏移分别为:
由式(17)可知,虚假运动目标的估计径向速度与设定速度、方位向位置以及缠绕周期数均有关,当xT不为0时,单干扰机形成的虚假运动目标的估计径向速度与设定径向速度不同。由式(18)可知虚假运动目标的估计方位向位置偏移不仅与设定径向速度有关,而且与虚假运动目标的方位向位置有关,这也与真实运动目标的成像特性不同。
由式(11)可知虚假目标在SAR图像中的方位向位置x=(xT-vrRT/Va),将式(18)所示方位向位置偏移代入,则定位后虚假目标的方位向位置为k(λRT)/d (k∈Z),由缠绕周期决定。当k=0时,即不存在缠绕,虚假目标的方位向定位位置为0,与干扰机位置一致,而与设定位置无关。当存在缠绕时,相同缠绕周期的虚假运动目标,定位后其方位向位置相同,由缠绕周期决定。对于分布在空间不同位置的多个虚假目标,若干涉相位不存在缠绕,定位后会被压缩为一条沿距离向分布的点或点线,其方位向位置与干扰机一致;若存在缠绕时,会被压缩为沿距离向分布的多条点线,点线的方位向位置k(λRT)/d,具有相同缠绕周期的虚假运动位于同一条点线上。
综上所述,单干扰机生成的虚假静止/运动目标经三通道对消干涉处理后均会被视为运动目标,其估计干涉相位由设定径向速度和方位向位置共同决定,估计径向速度与设定径向速度不一致,定位后的方位向位置由估计干涉相位的缠绕周期决定,而与设定位置无关,即存在方位向位置和径向速度不可控的缺陷。究其原因,相对于静止目标信号而言,单干扰机无论是通过时延还是幅相调制然后转发生成的虚假运动目标,其方位向位置和径向速度均会引起附加的多普勒相位,而真实运动目标附加的多普勒相位仅仅是由径向速度引起的,因此SAR-GMTI成像处理认为附加的多普勒相位是由径向速度引起的,不能区分虚假运动目标附加的多普勒相位中的方位向位置分量和径向速度分量,进而导致虚假运动目标方位向位置和径向速度不可控。另外从信号来波方向的角度来看,SAR接收到的单干扰机生成的不同位置的虚假运动目标的信号都是由干扰机发出的,即来波方向是相同的,其定位后方位向位置由干扰机的方位向位置决定,而真实运动目标的回波是从不同位置反射回来的,两者有本质的区别。
3 仿真分析与验证
本节通过仿真进一步分析单干扰机生成的虚假目标的运动特性。SAR-GMTI参数如表1所示。仿真场景的方位向和距离向范围分别为700m和300m。干扰机位于场景中心处。假设成像区域中存在两个真实运动目标,分别记为真实目标1和2,利用干扰机在SAR场景中生成8个虚假运动目标。真假运动目标的参数设定如表2所示,其中虚假运动目标的干涉相位根据式(16)(不考虑缠绕)计算。图3给出了真实目标和虚假目标的位置示意图,三角形的指向表示径向速度的方向,红色对应真实运动目标,黑色对应虚假运动目标。三通道对消干涉处理结果如图4所示,距离向坐标表示真实距离向位置与场景中心斜距之差。
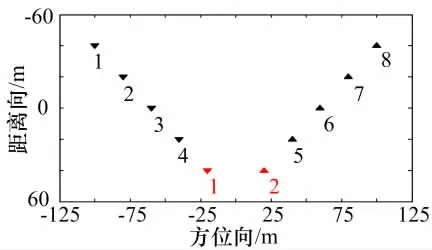
图3 真假运动目标理论位置示意图
图4 (a)和图4(b)分别为SAR成像结果和动目标检测结果,白色标号和红色标号分别对应虚假运动目标和真实运动目标。由图4(a)和(b)可知,无论真实运动目标还是虚假运动目标,其成像位置均与设定位置之间存在方位向偏移(如表2中成像位置所示),符合动目标SAR成像特性;此外对比图4(a)和图4(b)可知,除了真实目标2(径向速度为零),其它目标均被检测为动目标,特别的虚假目标1和8的径向速度为零,但是对消后虚假目标幅度与径向速度和方位向位置均有关,即sin(2πdxT/(λRT))不为零,从而被检测为动目标,证明了虚假静止目标会被检测为动目标的结论。
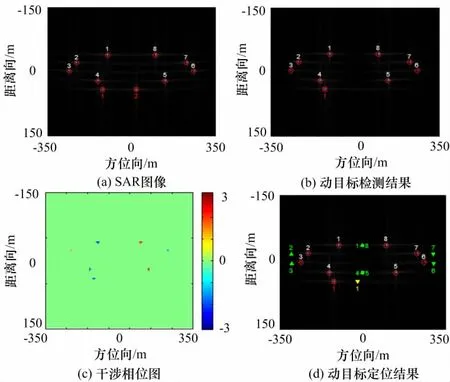
图4 三通道对消干涉结果
图4 (c)给出了检测到的动目标的未解缠干涉相位图,其估计值如表3所示,进而可得相应的方位向偏移以及定位位置。对比表2和表3可知:1)对于真实运动目标1,因其干涉相位无缠绕,所以其估计值与设定值基本一致,相应地,其估计径向速度以及定位位置也与设定值吻合;2)对于虚假目标1、4、5和8干涉相位不存在缠绕,估计值与理论值的误差也可以忽略,其定位后位置与干扰机位置基本一致;3)对于虚假目标2、3、6和7,由表2可知其理论干涉相位超出了,其中虚假目标2、3,其缠绕周期为1,理论缠绕值分别为1.462rad和0.8377rad,由于定位后方位向理论位置为-300m,而虚假目标6、7,缠绕周期为-1,理论缠绕值分别为-0.8377rad和-1.462rad,定位后方位向理论位置为300m,由表3可知,估计值与理论值基本一致。上述结果证明虚假运动目标的干涉相位由径向速度与方位向位置共同决定的结论,其定位后位置由缠绕周期决定。
为了更好的呈现定位后的结果,图4(d)给出了定位结果示意图,其中绿色对应虚假目标,黄色对应真实运动目标,三角形的指向表示径向速度的方向。由图4(d)可以看出虚假目标1、4、5和8定位后方位向位置与干扰机一致,形成一条沿距离向分布的点线,虚假目标2、3和虚假目标6、7分别被定位至方位向位置距干扰机-300m和300m处,形成两条沿距离向分布的点线。
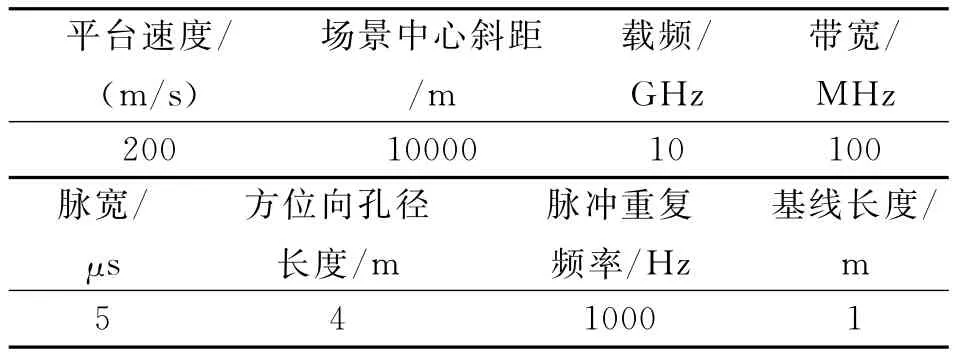
表1 三通道SAR-GMTI系统参数
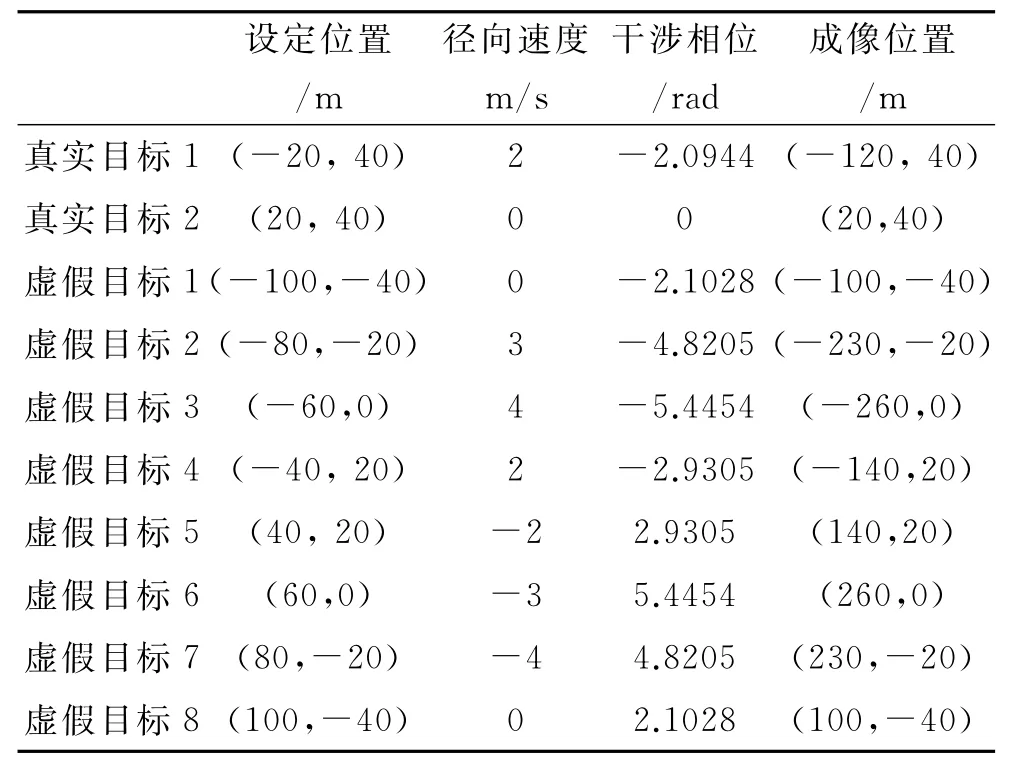
表2 真假运动目标的理论位置、径向速度、干涉相位、成像位置
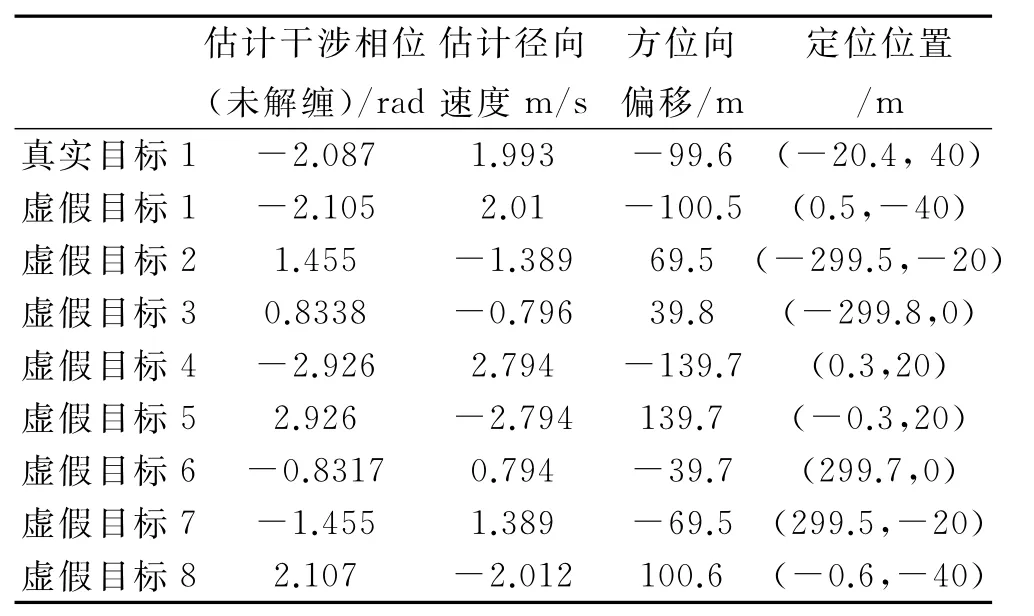
表3 真假运动目标的估计干涉相位、径向速度和定位位置
4 结束语
本文基于三孔径干涉对消处理,分析了单干扰机生成的虚假运动目标的速度和定位特性。结果表明,经过多通道SAR-GMTI处理后,虚假静止/运动目标均可能会被检测为动目标,与真实运动目标干涉相位仅与径向距离有关不同,虚假目标的估计干涉相位由设定径向速度和方位向位置共同决定,进而导致其估计径向速度和方位向位置均与理论设定值不一致。当干涉相位不存在缠绕或经过解缠绕处理后,虚假目标的定位后方位向位置一致;当干涉相位存在缠绕时,虚假目标的定位后方位向为特定值,由缠绕周期决定,具有相同缠绕周期的虚假目标具有相同的方位向定位位置。
本文研究成果证明单干扰机生成的虚假运动目标与真实运动目标的空间分布特征不符合,易被鉴别为虚假目标,进而被多通道对消或其他抗干扰措施剔除,可用于指导设计多通道SAR虚假目标鉴别方法和抗干扰方法,同时也为进一步开展对多通道SAR-GMTI欺骗干扰研究提供理论依据。在后续工作研究中,将开展基于双/多干扰机的虚假运动目标生成方法研究,力求突破单干扰机欺骗干扰的缺陷,对多通道SARGMTI形成有效欺骗干扰。■
