基于模型跟踪的变稳控制律设计研究
2018-11-29涂慧玲崔彦勇梁琼花韩占鹏
涂慧玲,崔彦勇,梁琼花,邓 欢,韩占鹏
(航空工业洪都,江西 南昌,330024)
0 引言
变稳飞机是一种借助变稳电传系统和可变人感达到改变基本飞机飞行动力学特性、稳定性与操纵性达到模拟其它飞机特性的空中飞行试验平台。通过变稳模拟新机特性可以帮助提早发现缺陷,缩短研制周期,节省开支,并且可用于培训飞行员。
实现飞机变稳主要通过变稳控制律设计实现跟踪模拟。本文在典型模型跟踪法的基础上,引入带指令积分的模型跟踪控制方法,并进行变稳控制律参数设计,而后以某型飞机为平台,通过不同状态点之间的跟踪模拟,在六自由度全量方程中验证变稳控制律的跟踪效果。
1 变稳基本原理和设计方法
1.1 变稳基本原理
空中飞行模拟最重要的是保证原型机和目标机间的运动相似,若原型机的运动方程组为:
式中:X表示状态向量,u为控制量,φ为外扰动量。
目标机的运动方程为:
则保证控制原型机和目标机运动相似的条件为:在相同的初始条件下即 X(t0)=Xm(t0),t≥t0时,存在着保证两机状态向量相等,即:X(t)=Xm(t)的控制 u(t),且在任何时候

式中G和Gm为可能的控制范围,F和Fm为可能的外扰动范围。
显然,如何满足X (t)=Xm(t)的控制,从而获得两机运动相似,进而实现相同的动态响应和飞行员感觉,构成了空中飞行模拟的理论基础和关键技术。
1.2 典型模型跟踪控制
模型跟踪法是通过一个包含本机在内的跟踪环来控制舵面偏转,以跟踪飞控计算机解算出的目标机模型响应。
设本机运动方程为:

设目标机运动方程为:


于是可求解出开环模型跟随法见图1(a)的舵面控制律为:

式中,K′m=[BTB]-1BT,K′m=-[BTB]-1BTA,它们分别为和 Xm的前馈。
闭环模型跟随法见图1(b)是将本机通过相应的控制系统构成一个理想的跟随环来跟随模型响应,闭环跟随的控制律使|Xm-X|最小,此时的舵面控制律为

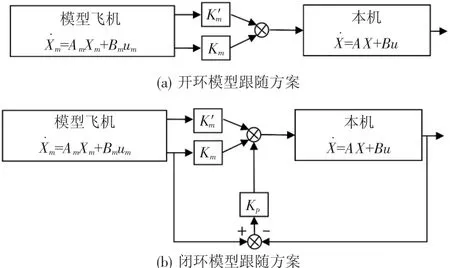
图1 典型模型跟踪法结构简图
模型跟踪法的优点在于:本机基本参数改变时,控制律的很小改变就可以使基本飞机构成的跟踪环仍保持一个良好的跟踪品质,从而获得一个理想的模拟结果。但无论开环模型跟踪法还是闭环模型跟踪法,其跟踪效果和本机系统的稳定性有较大关系,若本机系统稳定,则开环跟踪和闭环跟踪均较为理想;若本机系统不稳定,即矩阵A存在正的特征值,则开环跟踪控制最终会趋于发散,而闭环跟踪控制会存在一定的稳态误差。
1.3 带指令积分的闭环模型跟踪控制
大部分现代战斗机为了实现高敏捷性,其本体设计均为放宽静安定性,即本机系统不稳定,即使采用典型闭环跟踪也仍然无法实现较好的稳态跟踪效果。因此,为了提升模型的跟踪精度及系统的抗干扰能力,在典型的闭环模型跟踪法基础上引入变量跟踪误差ym-y,并接通积分,其控制框图如图2所示。
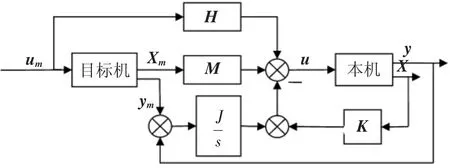
图2 带指令积分的模型跟踪法框图
由图2可知其舵面控制律为:

将式(4)代入(1)式所示的本机线性方程,如下:

用目标机线性方程(2)减去上式得:

另KM=K-M整理得到:

这个方程可以通过M预置与模型动态特性无关的误差特性,令Bm-BH=0,Am-A+BKM=0,则不能由X和um来控制模型跟踪误差,得到前向增益计算方法如下:
2 变稳控制律设计
2.1 设计思路
以某型飞机作为平台进行初始变稳控制律方法研究,选取某型飞机两个气动特性不同的状态点,以能力低的状态点跟踪能力高的状态点的响应。
根据飞行品质模拟试验结论,飞行员反应在纵向机动过程中,小速压时对俯仰角速率变化敏感,大速压时对法向过载变化更敏感;在横航向机动过程中,对滚转角速率和偏航角速率变化敏感。因此纵向在小速压时设计跟踪俯仰角速率,大速压设计跟踪法向过载;横航向设计跟踪滚转角速率和偏航角速率。
带控制系统的0204(2km,0.4M)和0206状态点三轴满杆操纵的仿真结果如图3~图6所示,可以看出飞机响应存在不小差距。
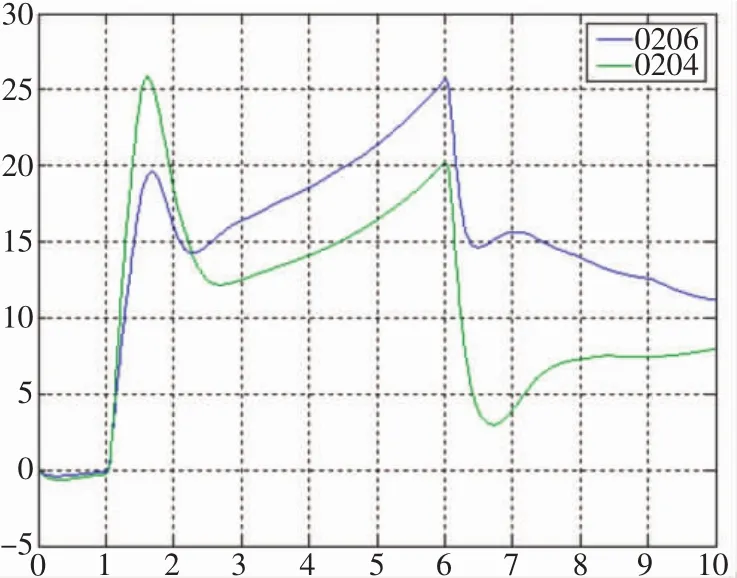
图3 俯仰角速率响应对比(Dz=-90mm)
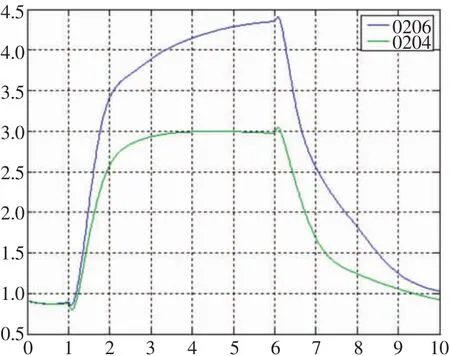
图4 法向过载响应对比(Dz=-60mm)
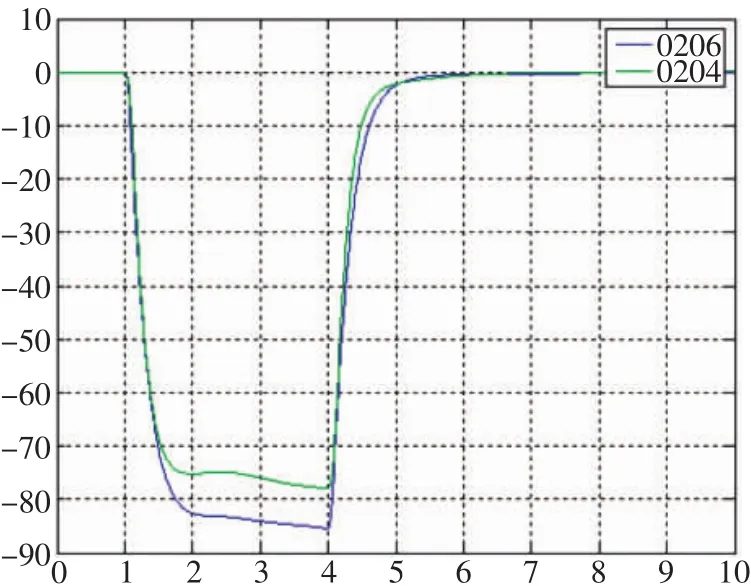
图5 滚转角速率响应对比(Dx=30mm)
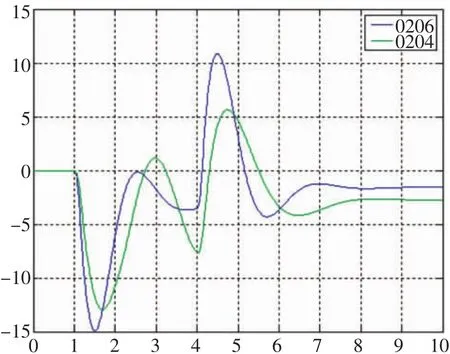
图6 偏航角速率响应对比(Dy=50mm)
2.2 俯仰角速率跟踪
以图2方式设计纵向变稳控制律,在六自由度非线性仿真模型中进行验证,以0204状态点模拟0206状态点,输入2.1节图3相同的纵向杆指令方波-90mm,俯仰角速率的跟踪曲线如图7所示,可见俯仰角速率的动态和稳态跟踪效果较好。
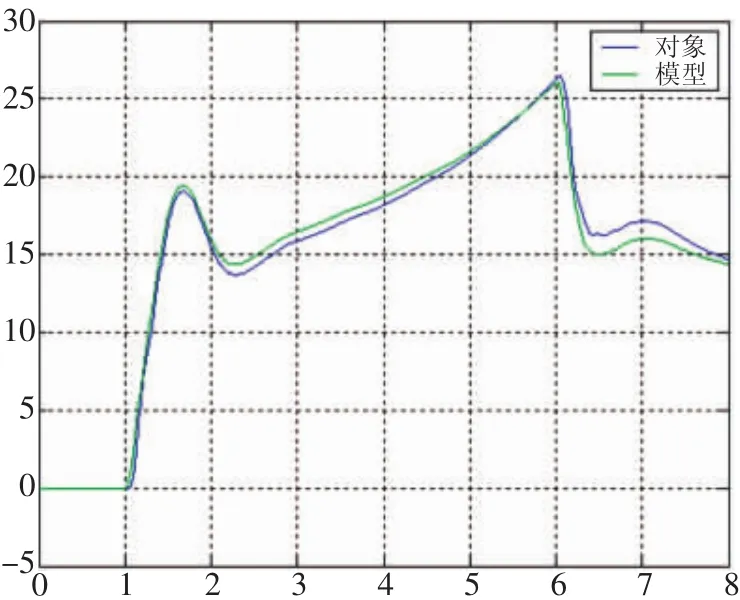
图7 俯仰角速率跟踪曲线(Dz=-90mm)
2.3 法向过载跟踪
在六自由度非线性仿真模型中以0204状态点模拟0206状态点,输入2.1节图4相同的纵向杆指令方波-60mm,法向过载跟踪效果如图8所示,可见动态和稳态跟踪存在少量误差,但总体跟踪趋势一致。
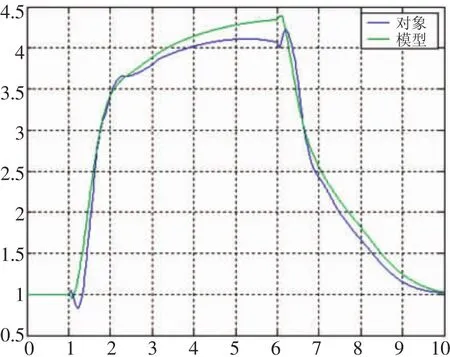
图8 法向过载跟踪(Dz=-60mm)
2.4 滚转角速率和偏航角速率跟踪
由于某型飞机横航向存在较大程度的耦合,无法运用等效拟配方法分别得到横向和航向的低阶等效状态空间矩阵,无法运用图2的设计理念进行设计。因此运用经典的PI控制器分别跟踪横向滚转角速率和航向偏航角速率,并加入前馈补偿环节,其跟踪控制如图9所示。
变稳控制框图中加入了偏航角速率反馈用于改善本体特性,副翼舵机前加入校正环节用于改善稳定储备。
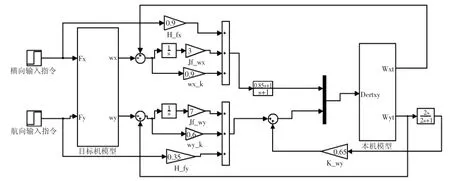
图9 横航向线性跟踪框图
在六自由度非线性方程中进行验证,输入2.1节图5相同的横向杆指令方波30mm,滚转角速率和偏航角速率的跟踪效果如图10~图11所示。
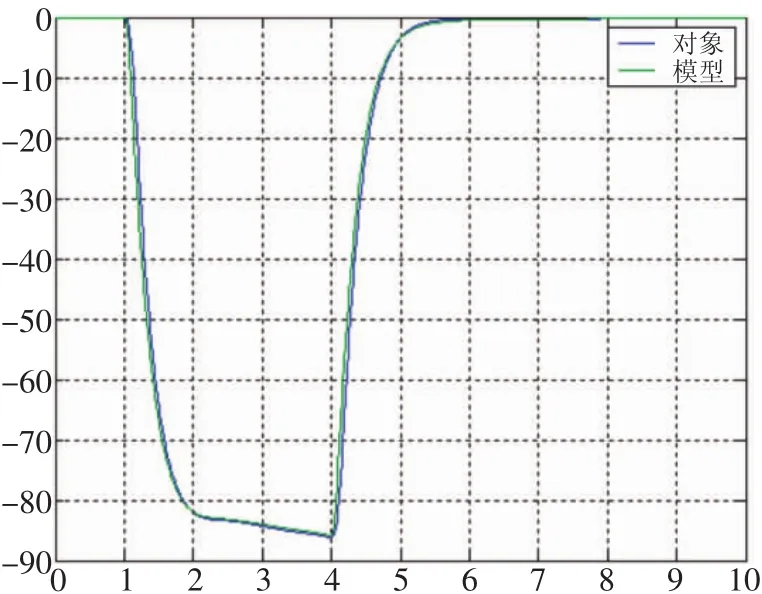
图10 滚转角速率跟踪曲线(Dx=30mm)

图11 偏航角速率跟踪曲线(Dx=30mm)
输入2.1节图6相同的脚蹬指令方波50mm,滚转角速率和偏航角速率的跟踪效果如图12~13所示。
由非线性仿真结果可知,飞机横航向滚转角速率和偏航角速率均能达到较好的跟踪效果。
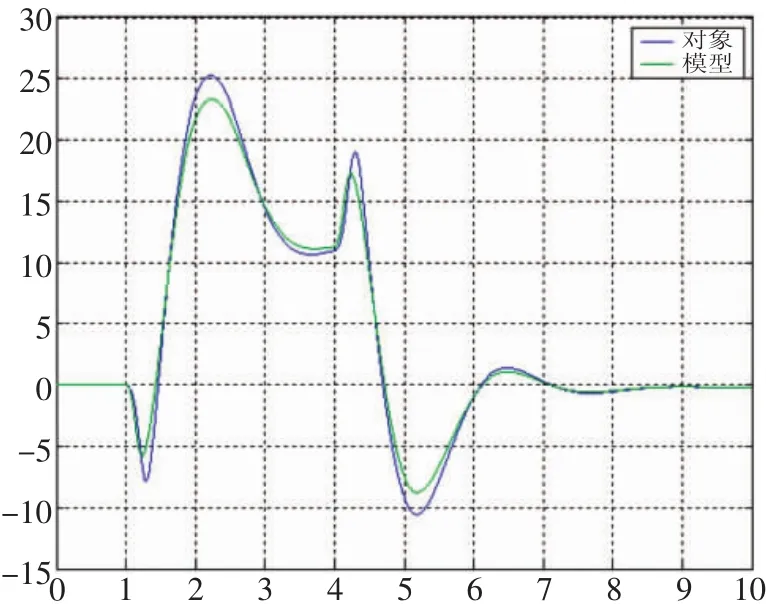
图12 滚转角速率跟踪曲线(Dy=50mm)
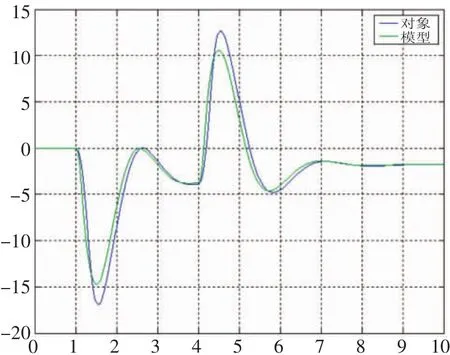
图13 偏航角速率跟踪曲线(Dy=50mm)
3 结语
本文主要研究了模型跟踪变稳控制方法,以某型飞机为平台进行变稳控制律设计,纵向选取带指令积分器的模型跟踪方法,横航向选取了经典PI控制跟踪法,从六自由度非线性仿真结果可以看出,法向过载、俯仰角速率、滚转角速率和偏航角速率的跟踪效果理想。
