异步不等速率航迹速率比对区间灰数关联算法的性能影响仿真分析∗
2018-11-28张怀巍高玉章
郑 麟 衣 晓 张怀巍 高玉章
(1.海军航空大学电子信息工程系 烟台 264001)(2.91423部队 大连 116043)(3.海军航空大学青岛校区教研保障中心 青岛 266041)
1 引言
在分布式多目标跟踪系统中,处理中心接收到各局部节点上报的局部航迹信息后进行融合,此时首先要解决的是对来自不同节点的航迹进行分类,即航迹-航迹互联问题[1~2]。由于各传感器节点开机时间以及扫描速率不同,导致融合中心接收到的局部航迹往往是异步的[3]。
对于异步航迹关联问题,目前一般是通过内插外推[4,10~11]的方法,首先进行时间对准,再利用同步方法进行关联。但是由于缺乏对航迹先验信息的了解,这种方法在配准过程中会存在难以消除的误差,并且与滤波方程的误差有很强的相关性,难以消除和衡量。为此,文献[5]提出了一种无需时域配准的异步航迹关联算法,关联成功率较高且不会出现误差扩散。
影响异步不等速率航迹关联性能的条件除了开机时间差之外,多传感器采样周期的差异也是一个重要影响因素。在传感器开机时间差相同的情况下,不同采样周期比对于航迹关联算法性能影响强弱是值得讨论与研究的。本文通过仿真实验,探讨了文献[6]时域配准算法以及文献[5]算法中不同采样周期比对于航迹关联性能的影响,为便于阐述,算法忽略了实际应用中系统误差的影响。
2 模型描述
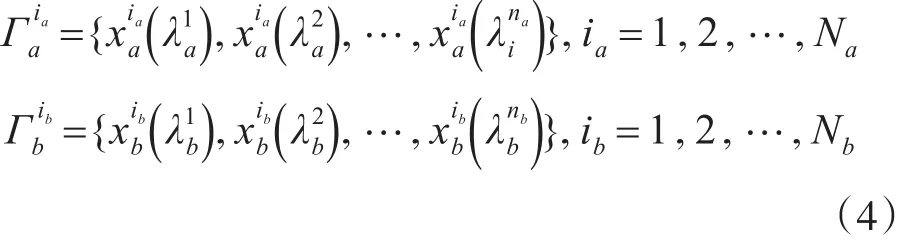
假设在一个由M个局部节点构成的多目标跟踪系统中,存在N批受监测的目标。传感器在一个处理周期内观测到的局部航迹数等于公共监测区的目标个数Ns。记来自传感器a的航迹集合Γa(k)为

式中,k-λn(k)为时间标记,n为处理周期采样点的个数,(k -λn(k ) )表示航迹ia在处理周期[k T ,(k +1) T]内的第n个航迹点的状态信息,传感器b同理。
由于多传感器可能具有不同采样速率,会导致一定处理周期内各传感器上报的航迹点数不等。设传感器a与b的采样周期分别是Ta和Tb,且Tb≥Ta则令

称为采样周期比。图1给出了理想状况时,开机时间差相同的情况下,采样周期比分别为3∶5和5∶6的分布式多目标跟踪系统的异步航迹示意图。
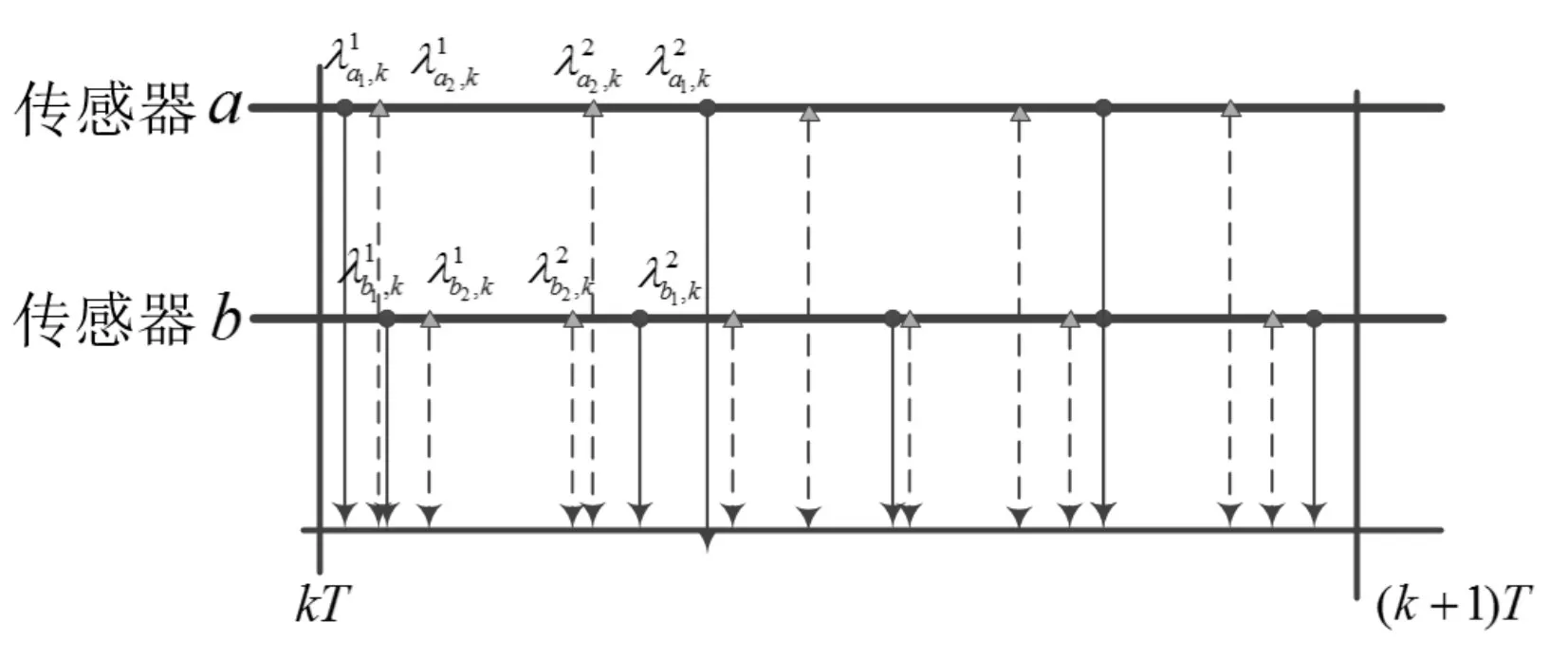
图1 理想状况下分布式多目标跟踪系统的异步航迹示意图
在同一采样周期内,两传感器由于采样频率的不同,上报的航迹数据点数量也不同。当改变采样周期比τ时,航迹文件的处理结果也存在差异,最终影响航迹关联性能。由于τ的取值理论上有无穷多个,为方便处理,本文取最常见采样比进行研究。
3 算法描述[5]
3.1 航迹区间化
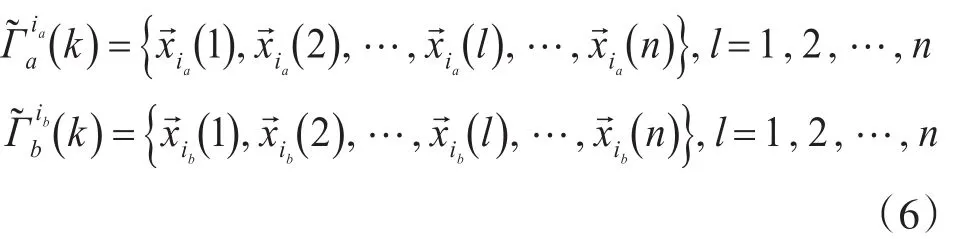
为不进行时域配准,现将异步不等速率航迹进行区间化,由于不同航迹文件中航迹点的时间标记不同,对转化后的航迹进行预处理。在某一特定的融合周期[k T ,(k +1) T]内,将第i个目标在传感器a和b下的航迹(k ) 和(k)划分为区间灰数的形式,使得划分后的区间数相同且一一对应。航迹(k ) 和(k)可以分别表示为式中,na和nb表示来自传感器a和b的每个航迹序列分别含有na和nb个数据,对于nb/na的不同取值情况,采用文献[5]中的区实混合序列描述法,将航迹文件区间化,具体构造原则如下:
1)长度相同原则,即确保将航迹数据变换为统一的长度,一个可行的方案是,选取长度L=INTu[nan0],n0=INTu[nanb],其中 INTu[x]为取大于x的最小整数运算;
2)对称性原则,即令每条航迹中生成的区间灰数呈中心对称分布;
3)在满足条件1)和2)的前提下,尽可能减少新生成的航迹序列中相同时刻点和点对应的情况;
4)原则的优先级排序:1)> 2)> 3)。
需要注意的是,当na和nb相差较大时,使用本方法得到的区实混合序列不唯一,此时应尽量选取覆盖整个航迹文件的灰区间,且尽量保证每个灰区间大小与位置对称。例如,当na=14,nb=3时,根据原则1)得到L=3,n0=5,可将序列变换为

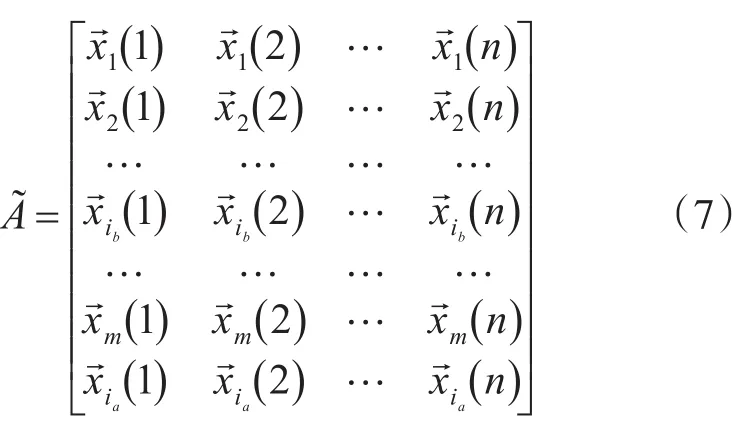
经过变换后得到的等长航迹序列可表示为
3.2 灰关联度计算[14-16]

其中

每条航迹是由速度、加速度等共t个指标分量构成,可求得航迹在所有t个分量上的灰关联度ra,rb,…,rt。对各分量的相似度进行加权融合得到:

对于匀速运动而言,此处共有 x,y,vx,vy四个方向上的分量,ζi分别取为0.4,0.4,0.1,0.1。
4 仿真分析
假设有两部异地配置的2D雷达,坐标分别是(0,0)和(100km,0)。对50个机动目标进行跟踪20s,进行100次Monte Carlo实验。雷达2与雷达1开机时间相差0.2s,采样比为τ,融合中心的采样时间间隔T=1s;采用匀速运动模型,目标速度在200m/s~400m/s之间随机分布,雷达1的测距和测角误差分别为100m,0.01rad;雷达2的测距和测角误差分别为80m,0.008rad。一次仿真实验得到的目标航迹如图3所示。
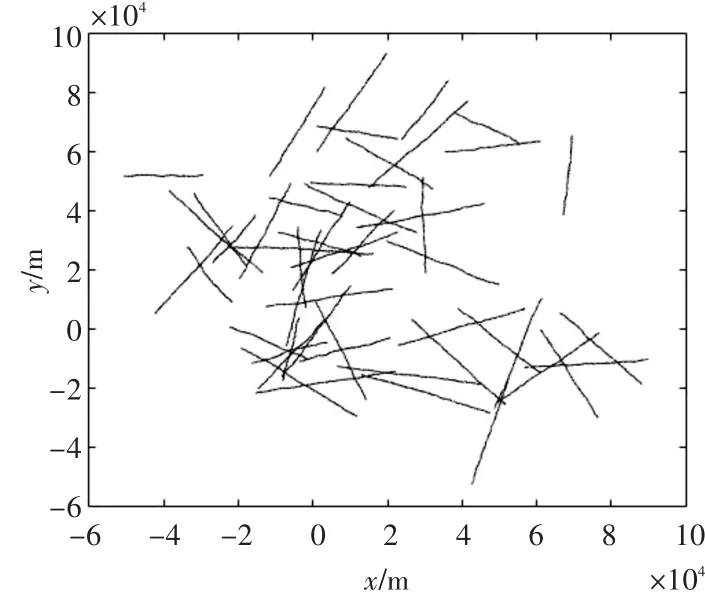
图3 目标真实航迹示意图
研究理想环境下本文算法以及最小二乘加权法关联性能与速率比的关系。取速率比分别为1:n(n=2:20),2:n(n=3:20),3:n(n=4:20),n:n+1(n=1:20),采用航迹正确关联率(Ec)对航迹关联效果进行评价:
式中,N表示总航迹数,k是处理周期序号,Ci(k)表示第i次Monte Carlo实验时成功关联的总次数,ts表示跟踪时间,此处采用跟踪第20s的航迹正确关联率作为评价指标。对实验数据进行拟合后得到关联率趋势图如图4~6。
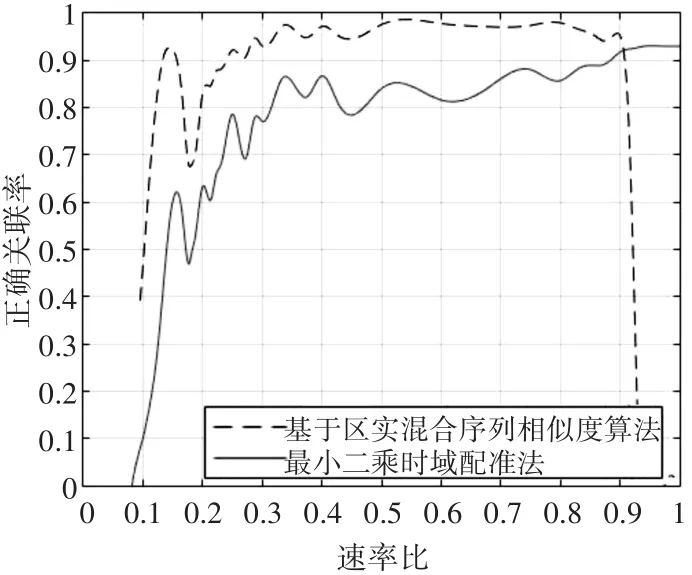
图4 不同速率比两种方法航迹正确关联率比较
可以看出,对于异步不等速率航迹而言,文献[5]中的基于区实混合序列的灰关联法在绝大多数速率比情况下关联成功率要高于时域配准的方法,但在速率比高于0.9时出现明显下降,关联成功率远低于最小二乘法。这是由于当速率比越接近于1的情况下,两传感器单位采样周期内航迹文件中数据点数量过多,划分灰区间过多导致航迹灰化程度过高,使得误差扩散速度加快。而当速率比过小时,两传感器上传航迹文件中数据点数量差异过大,因此也会导致航迹关联率下降。由拟合数据图可看出,对于异步不等速率而言,当速率比介于0.1~0.9之间以及为1时,采用文献[5]的算法较好;速率比高于0.9时采用时域配准的方法更合适;速率比低于0.1时两种方法关联成功率都较低。
当τ=1时,异步航迹即变为等速率航迹,取两传感器采样周期均为0.1s,当融合周期改变时,两种方法的正确关联率如图7所示。
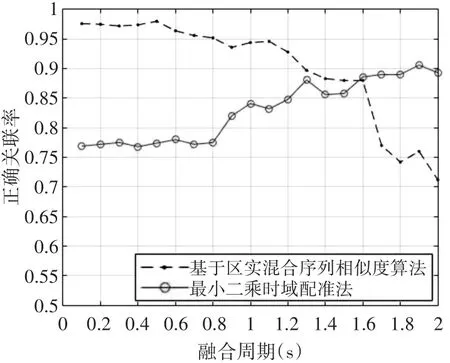
图7 融合周期改变时两种方法的正确关联率比较
图中可以看出,等速率时两种算法正确关联率都比较稳定,当融合周期较长时,灰区间数目明显增加导致文献[5]算法的正确关联率出现下降,但总体而言,由于无需时域配准,误差较小,该算法综合性能较优。
5 结语
本文针对分布式多目标跟踪系统中存在的航迹异步问题,研究了一种无需时域配准的异步不等速率航迹灰关联算法,并探究了不同速率比对其关联性能的影响。通过Montcalo仿真实验,将该算法与时域配准方法的关联性能进行比较。仿真结果表明,绝大多数情况下,本文研究算法由于无需时域配准,关联成功率较高,但当速率比低于0.1或介于0.9~1之间时关联成功率下降较快。
