基于Kinect深度信息的人体三维点云去噪方法
2018-11-28杜棋东
杜棋东
(广州铁路职业技术学院教育技术中心 广州 510430)
1 引言
人体三维重建技术在虚拟现实、人工智能、逆向工程等领域有着重要应用。当前国内外基于激光、结构光的三维数据采集设备系统已较为成熟,重建数据精度高,然而这些设备昂贵,系统操作复杂,不适合一般用户使用,难以大范围应用于实际工作中。Kinect作为一款廉价的三维数据采集传感器,可以获取场景的影像信息与深度数据[1~4],凭借快速获取人体三维点云数据的优势,常应用于人体三维重建[5~8]。但是,由于 Kinect精度偏低、人体表面光滑程度不同以及环境因素等原因,导致其获取深度信息噪声数据较大,对人体三维重建效率与重建精度有极大的影响,故对其点云数据去噪处理成为人体三维重建的关键。
Alexa等[9]利用移动最小二乘法对点云数据进行曲面拟合,将点云噪声投影到一个参数曲线模型上,实现高精度移除噪声点,然而该算法对离群点较难处理。Jones等[10]和 Fleishman等[11]在三维网格去噪中应用图像双边滤波方法,二者均能较好地光顺小尺度噪声,但存在过于光顺大尺度噪声的缺点。雷敏等[12]针对大量点云数据存在复杂计算的瓶颈问题,提出一种基于包围盒的三维点云密度聚类的方法,减少点云的数据量,提高聚类运行效率,保证点云去噪处理高效进行。王丽辉等提出了一种大尺度噪声用模糊C均值聚类算法进行处理,小尺度噪声则用图像双边滤波算法光顺的算法[13],但是对于大量点云聚类计算存在运行效率不高的缺点。因此,本文提出一种基于Kinect传感器的人体三维点云去噪方法,该方法采用帧融合进行预处理,然后通过改进的C均值方法对离群点噪声进行整体聚类分析并去除,最后利用深度数据双边滤波方法对高频信息进行处理。通过实验对比验证,本文方法能够有效地除去大尺度噪声和光顺小尺度噪声,为人体三维重建提供较高精度点云数据。
2 三维点云去噪
2.1 数据预处理
由于周围环境光以及人体自身光滑程度等因素的影响,Kinect在获取人体点云数据的同时,也获取了部分背景点云数据。根据Kinect传感器特性,颜色Color传感器获取图像分辨率为1920×1080,深度Depth传感器则支持的最大分辨率为512×424。为快速有效地去除背景点云数据,本文采用多模型数据融合方法进行处理。
利用Kinect对人体的不同区域进行扫描,获取独立的分块点云数据。场景区域扫描是一个时间序列的过程,在区域扫描地过程中,要注意摄像头扫描的位置,如果扫描人体重叠区域过多,会导致数据融合计算量越大,降低效率;如果扫描重叠区域较小,则会影响融合结果。因此,本文直接利用摄像头的角度偏转量和平移量来计算扫描的角度[14],再结合深度双阀值的多模型数据融合方法去除人体的背景,达到去除由于周围环境光或自身因素引起的部分噪声的目的,改善点云数据。
2.2 离群点噪声去除
Kinect获取的预处理数据仍存在离群点噪声和高频噪声,分布并不均匀。本文通过改进的C均值方法(FCM)去除部分大尺度离群点噪声,如果点云对象mj影响范围内的邻近点云小于规定的临界值,则判定点云对象mj为离群点噪声,可去除;否则将点云对象mj移至聚类中心。FCM的目标函数定义:

为了更容易识别离群点数据,使得聚类更为容易,引入模糊权值因子θ改进c均值方法[15],点云mj与聚类中心Ok的欧式距离定义为

2.3 高频信息去噪
Kinect传感器获得的三维点云后,将其数据信息投影至平面上成像,再应用双边滤波对深度图像进行去噪。双边滤波算法作为图像滤波的常用方法,能够较好地应用于人体三维点云数据去噪。人体三维点云数据双边滤波是将噪声点沿点的法向量移动,不断调整其坐标位置。双边滤波的定义为


其中:H(mi)是点云mi的邻域点,Wc是点云mi到其邻域点的光顺滤波权值因子,Ws是点云mi到其邻域点在mi法向量ri的特征保持权值因子。Wc与Ws均是标准高斯滤波。
光顺滤波权值因子的定义为

特征保持权值因子的定义为

其中:σc为点云mi到其邻域点的距离对mi的影响因子,作为高斯滤波参数,用于控制光顺程度,σc的数值越大,代表可选取的邻域点越多,点云数据模型的光滑度就越好;σs为点云mi到邻近点的距离在ri的投影对点云mi的影响因子,同样作为高斯滤波参数,用于控制特征保持性,σs越大,代表点云mi在ri上移动的距离越长,点云数据模型的特征保持性越好。本文提出的深度双边滤波方法应用于高频信息去噪方法过程如下:
1)搜索点云mi的邻域,计算出它的k个最近邻域点H(mi)。
2)计算点云mi的法向量ri,并调整所有法向量方向一致朝外。
3)计算光顺滤波权值因子的参数x=‖mi-‖mj,x代表点云mi到邻域点mj的距离。
4)计算特征保持权值因子的参数y=‖ri-‖rj,y代表点云mi的法向量与邻域点mj的法向量两者的内积。
5)根据式(5)和式(6)计算Wc与Ws。
6)根据式(4)计算改进后的双边滤波权值因子α。
3 实验结果与分析
实验环境:操作系统为Windows 10 64位,处理器为i7,主频为3.1GHz,内存为4G,设备为Kinect v2.0。
3.1 点云预处理实验分析
通过Kinect扫描获取的点云存在噪声,采用1.1节的三维点云预处理方法,对人体三维点云数据进行去背景和均值化处理。本文一次采集15帧点云数据,图1为人体15帧点云数据进行基于深度双阀值的多模型融合的结果。由图1(a)、(b)两图可知,融合前场景中人体的一些背景部分和丢失部分在融合后得到去除和一定的恢复。根据实验计算,中间帧第7帧非零有效点云数据融合前和融合后的数据分别是154313和142236,由图1看出,整个人体的点云数据是增多,但是融合后点云数据却是减少,原因主要是融合后去除了人体背景的噪声点。

图1 人体三维点云多模型融合
3.2 离群点去噪实验分析
利用改进的C均值算法去除离群噪声点,首先选取点云辐射对象范围内的邻近点临界值为15,然后再选取合适的参数值,选取不同的x进行实验,加权指数因子x的经验范围为[1.0,5],结果如表1所示。
当x最大时,过度去噪;当x最小时,噪声点不能够完全去掉。通过实验图对比分析,x=2时,能够获得较好的去噪效果,如图2所示。

表1 C均值离群点去噪实验分析

图2 离群点噪音去除效果
从上图可以看出,在点云基础上偏移较多的数据点,也就是离群点噪声点,可以通过改进的C均值算法进行有效去除,仅留下一些偏移较少的数据点的噪声,也就是高频信息噪声。
3.3 高频信息去噪实验分析
利用双边滤波的方法去除高频信息噪声点,去噪效果主要受σc、σs值的影响,由于人体深度纹理并不是特别复杂,σs值对于平滑去噪效果影响不大;当σc过大时,会造成过于平滑,σc过小时,高频信息去除不完全,影响平滑效果。因此,本文利用不同的参数进行实验,如图3所示。
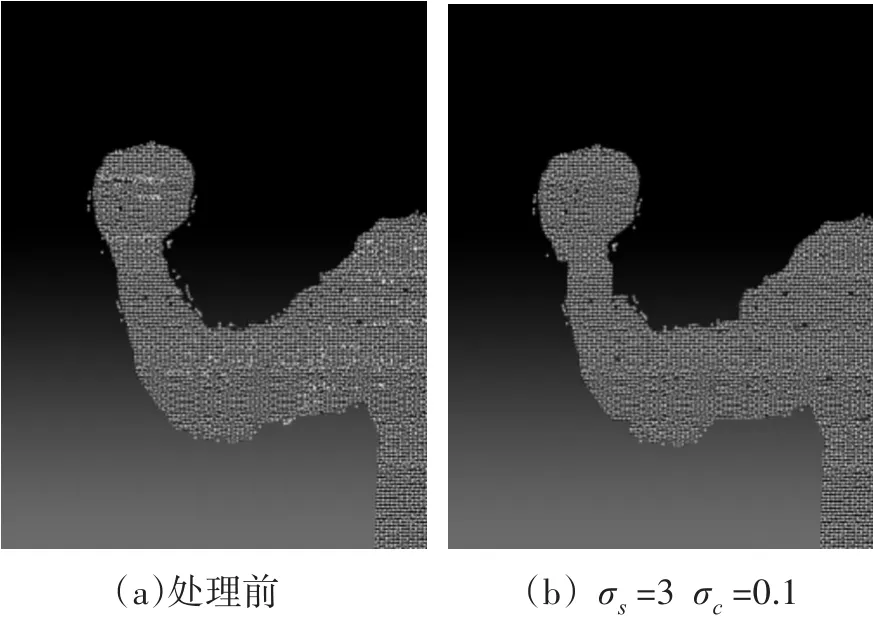

图3 去除高频噪声平滑效果
经过双边滤波的人体三维点云去噪效果如图4所示。

图4 人体三维点云去噪效果图
为了更好地验证本文算法的运行效率和有效性,与传统双边滤波算法和进行了比较。实验对象为两个身高不一致的人,A的身高1.55m,B的身高1.75m。通过实验结果可知,本文算法在数据量增大时,除了去除高频信息明显外,还可以保持较高的效率,结果如表2所示。

表2 算法性能比较
4 结语
本文提出了一种三维点云去噪方法,集合多帧融合、C均值算法和双边滤波等算法优点,能够除去人体大尺度噪声和光顺小尺度噪声。从实验结果可知,本文算法特点:一是具有普适性,能够有效地对离群点噪声和高频噪声的点云数据同步进行处理;二是具有鲁棒性,在除去噪声的过程中,能够维持人体模型的关键特征,防止取模变形。与传统双边滤波算法和模糊C均值算法比较,本文方法能够保证人体特征的基础上,去除较大范围的噪声,运行时间效率较高。但是,在本算法中实验参数均由人工调节,下一步将根据人体三维点云统计特性自适应地选择参数进行优化。
